yolo 3d车辆目标检测(教程+代码)
关于3D目标检测及其与YOLO3D相关性的概览:
3D目标检测:开启视觉感知的新维度
随着计算机视觉技术的发展,目标检测算法已经成为人工智能领域的重要组成部分。从自动驾驶汽车到无人机导航,再到增强现实(AR)应用,3D目标检测技术正在逐步改变我们与周围环境交互的方式。传统的2D目标检测虽然取得了显著的进步,但在处理三维空间中的物体识别与定位时却显得力不从心。因此,3D目标检测技术应运而生,它不仅能够识别出目标物体,还能准确地估计其在三维空间中的位置、大小及姿态。
什么是3D目标检测?
3D目标检测旨在从图像或点云数据中识别并定位三维空间中的物体。这项技术的关键在于不仅要识别物体是什么,还要确定它们在三维空间中的具体位置。相较于2D目标检测,3D检测更加复杂,因为它需要额外的空间信息来完成任务。
为什么需要3D目标检测?
- 自动驾驶:为了使车辆能够在复杂的交通环境中安全行驶,必须精确地理解其他车辆、行人和其他障碍物的位置。
- 机器人技术:机器人需要能够在动态环境中导航,并与周围物体进行互动。
- 增强现实:AR技术要求对真实世界中的物体进行精准的虚拟叠加,这需要高度精确的三维感知能力。
安装YOLO3D
YOLO3D是一个强大的工具,用于3D目标检测。安装YOLO3D可以通过多种方式实现,本文将详细介绍使用Anaconda虚拟环境或Docker镜像的方法。
Anaconda虚拟环境
创建一个名为yolo3d的conda环境,其中包含了Python 3.8和NumPy的基本依赖项:
conda create -n yolo3d python=3.8 numpy
激活这个新创建的环境:
conda activate yolo3d
接下来,安装PyTorch和torchvision。请确保安装的版本至少为1.8及以上。如果您的GPU不支持该版本,请参考Nelson Liu的博客来找到合适的安装方法:
pip install torch==1.8.1 torchvision==0.9.1
最后,安装项目所需的其余依赖项:
pip install -r requirements.txt
Docker引擎
使用Docker引擎可以轻松安装所有必需的依赖项。首先,从仓库拉取Docker镜像:
docker pull ruhyadi/yolo3d:latest
然后,运行Docker容器:
cd ${YOLO3D_DIR}
./runDocker.sh
这将带您进入交互式Docker容器终端,在这里您可以运行推理代码或Flask应用程序。
下载预训练权重
为了运行推理代码或恢复训练,您可以下载预训练的ResNet18或VGG11模型。这些模型已经过10个时期的训练。您可以下载ResNet18或VGG11作为--weights参数使用:
cd ${YOLO3D_DIR}/weights
python get_weights.py --weights resnet18
推理
要使用预训练模型进行推理,可以运行以下命令。此命令可以在conda环境中或Docker容器内执行:
python inference.py \
--weights yolov5s.pt \
--source eval/image_2 \
--reg_weights weights/resnet18.pkl \
--model_select resnet18 \
--output_path runs/ \
--show_result --save_result
此外,推理也可以在Colab笔记本上运行,请访问相应的链接获取更多信息。
训练
YOLO3D模型可以使用PyTorch或PyTorch Lightning进行训练。为了开始训练,您需要一个comet.ml的API密钥来可视化训练过程中的损失和准确率。请按照comet.ml文档获取API密钥:
使用PyTorch进行训练:
python train.py \
--epochs 10 \
--batch_size 32 \
--num_workers 2 \
--save_epoch 5 \
--train_path ./dataset/KITTI/training \
--model_path ./weights \
--select_model resnet18 \
--api_key xxx
使用PyTorch Lightning进行训练:
python train_lightning.py \
--train_path dataset/KITTI/training \
--checkpoint_path weights/checkpoints \
--model_select resnet18 \
--epochs 10 \
--batch_size 32 \
--num_workers 2 \
--gpu 1 \
--val_split 0.1 \
--model_path weights \
--api_key xxx
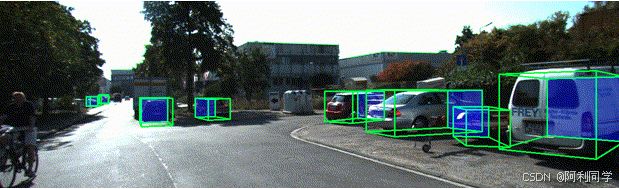
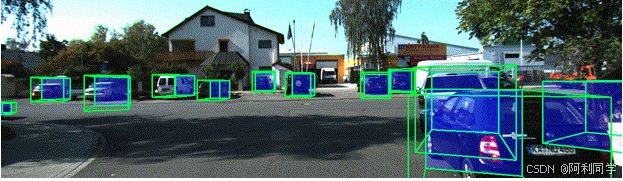
https://github.com/ruhyadi/YOLO3D/blob/main/docs/demo.gif
以上步骤详细介绍了如何安装YOLO3D并开始使用。无论是选择Anaconda还是Docker,都可以让您顺利地进行3D目标检测的研究与开发工作。希望这些指南能帮助您成功地设置YOLO3D环境,并探索其在实际应用中的潜力。