arm 驱动进阶:输入子系统概念及架构
输入子系统由 驱动层、输入子系统核心、事件处理层 三部分组成,个输入事件,如鼠标移动、键盘按下等通过Driver->Inputcore->Event handler->userspace的顺序到达用户控件的应用程序。
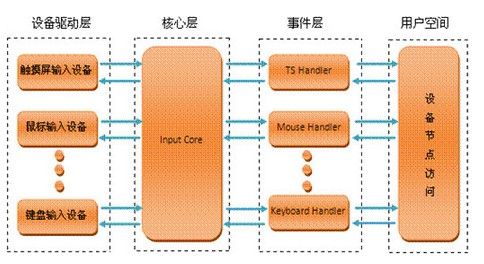
驱动层:将底层的硬件输入转化为统一事件形式,想输入核心(Input Core)汇报。
输入子系统核心:承上启下。为驱动层提供输入设备注册与操作接口,如:input_register_device;通知事件处理层对事件进行处理;在/Proc下产生相应的设备信息
事件处理层:主要是和用户空间交互。(Linux中在用户空间将所有的设备都当初文件来处理,由于在一般的驱动程序中都有提供fops接口,以及在/dev下生成相应的设备文件nod,这些操作在输入子系统中由事件处理层完成)
设备描述:
input_dev结构
实现设备驱动核心工作是:向系统报告按键、触摸屏等输入事件(event,通过input_event结构描述),不再需要关心文件操作接口。驱动报告事件经过inputCore和Eventhandler到达用户空间。
注册输入设备函数:
int input_register_device(struct input_dev *dev)
注销输入设备函数:
void input_unregister_device(struct input_dev *dev)
驱动实现——初始化(事件支持):
set_bit()告诉input输入子系统支持哪些事件,哪些按键。例如:
set_bit(EV_KEY,button_dev.evbit) (其中button_dev是struct input_dev类型)
struct input_dev中有两个成员为:
evbit:
事件类型(包括 EV_RST,EV_REL,EV_MSC,EV_KEY,EV_ABS,EV_REP等)
keybit:
按键类型(当事件类型为EV_KEY时包括 BTN_LEFT,BTN_0,BTN_1,BTN_MIDDLE等)
驱动实现——报告事件:
用于报告EV_KEY,EV_REL,EV_ABS事件的函数分别为
void input_report_key(struct input_dev *dev,unsigned int code,int value)
void input_report_rel(struct input_dev *dev,unsigned int code,int value)
void input_report_abs(struct input_dev *dev,unsigned int code,int value)
驱动实现——报告结束:
input_sync()同步用于告诉input core子系统报告结束。
实例:触摸屏设备驱动中,一次点击的整个报告过程如下:
input_reprot_abs(input_dev,ABS_X,x); //x坐标
input_reprot_abs(input_dev,ABS_Y,y); // y坐标
input_reprot_abs(input_dev,ABS_PRESSURE,1);
input_sync(input_dev);//同步结束
输入子系统实现原理图:
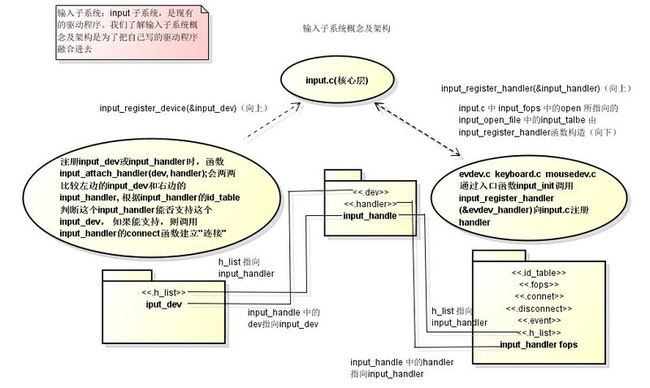
内核代码实现分析:
drivers/input/input.c: input_init > err = register_chrdev(INPUT_MAJOR, "input", &input_fops); static const struct file_operations input_fops = { .owner = THIS_MODULE, .open = input_open_file, }; 问:怎么读按键? input_open_file struct input_handler *handler = input_table[iminor(inode) >> 5]; new_fops = fops_get(handler->fops) // =>&evdev_fops file->f_op = new_fops; err = new_fops->open(inode, file); app: read > ... > file->f_op->read input_table数组由谁构造? input_register_handler 注册input_handler: input_register_handler // 放入数组 input_table[handler->minor >> 5] = handler; // 放入链表 list_add_tail(&handler->node, &input_handler_list); // 对于每个input_dev,调用input_attach_handler list_for_each_entry(dev(注意与“注册输入设备”对应handler), &input_dev_list, node) input_attach_handler(dev, handler); // 根据input_handler的id_table判断能否支持这个input_dev 注册输入设备: input_register_device // 放入链表 list_add_tail(&dev->node, &input_dev_list); // 对于每一个input_handler,都调用input_attach_handler list_for_each_entry(handler, &input_handler_list, node) input_attach_handler(dev, handler); // 根据input_handler的id_table判断能否支持这个input_dev input_attach_handler id = input_match_device(handler->id_table, dev); error = handler->connect(handler, dev, id); 注册input_dev或input_handler时,会两两比较左边的input_dev和右边的input_handler, 根据input_handler的id_table判断这个input_handler能否支持这个input_dev, 如果能支持,则调用input_handler的connect函数建立"连接" 怎么建立连接? 1. 分配一个input_handle结构体 2. input_handle.dev = input_dev; // 指向左边的input_dev input_handle.handler = input_handler; // 指向右边的input_handler 3. 注册: input_handler->h_list = &input_handle; inpu_dev->h_list = &input_handle; evdev_connect evdev = kzalloc(sizeof(struct evdev), GFP_KERNEL); // 分配一个input_handle // 设置 evdev->handle.dev = dev; // 指向左边的input_dev evdev->handle.name = evdev->name; evdev->handle.handler = handler; // 指向右边的input_handler evdev->handle.private = evdev; // 注册 error = input_register_handle(&evdev->handle);
输入子系统read调用过程原理图:
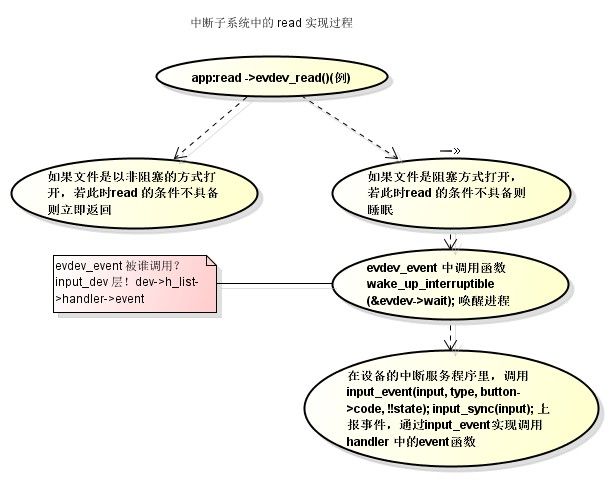
内核代码实现分析:
app: read -------------------------- ....... evdev_read // 无数据并且是非阻塞方式打开,则立刻返回 if (client->head == client->tail && evdev->exist && (file->f_flags & O_NONBLOCK)) return -EAGAIN; // 否则休眠 retval = wait_event_interruptible(evdev->wait, client->head != client->tail || !evdev->exist); 谁来唤醒? evdev_event wake_up_interruptible(&evdev->wait); //evdev_event被谁调用?input_dev->h_list->handler->event,在设备的中断服务程序里,确定事件是什么,然后调用相应的input_handler的event处理函数 gpio_keys_isr // 上报事件 input_event(input, type, button->code, !!state); input_sync(input); input_event(struct input_dev *dev, unsigned int type, unsigned int code, int value) struct input_handle *handle; list_for_each_entry(handle, &dev->h_list, d_node) if (handle->open) handle->handler->event(handle, type, code, value);