使用YOLOv8训练一个无人机(UAV)检测模型,深度学习目标检测中_并开发一个完整的系统 yolov8来训练无人机数据集并检测无人机
使用YOLOv8训练一个无人机(UAV)检测模型,深度学习目标检测中_并开发一个完整的系统 yolov8来训练无人机数据集并检测无人机
无人机数据集,yolo格式
种类为uav,一共近5w张图片,如何用yolov8代码训练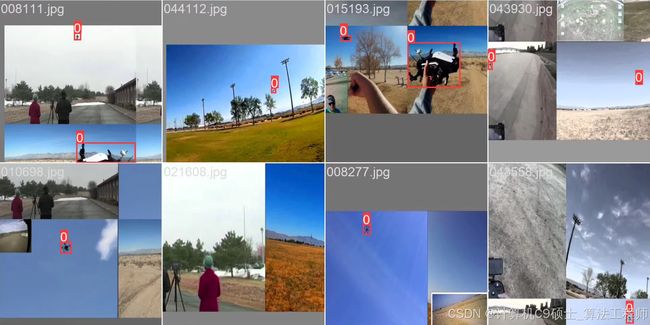
无人机检测数据集
文章目录
-
- 以下文章及内容仅供参考。
-
- 1. 环境部署
- 2. 数据预处理
-
- 数据集准备
- 划分数据集
- 3. 模型定义
- 4. 训练模型
- 5. 评估模型
- 6. 结果分析与可视化
- 7. 集成与部署
-
- PyQt6 GUI (`gui.py`)
以下文章及内容仅供参考。
为了使用YOLOv8训练一个无人机(UAV)检测模型,并开发一个完整的系统,将覆盖从环境部署到数据预处理、模型定义、训练、评估及可视化和界面开发的所有步骤。以下指南和代码示例。
1. 环境部署
确保安装了所有必要的依赖库:
pip install -r requirements.txt
requirements.txt内容示例:
torch>=1.9.0
opencv-python
timm
psutil
PyQt6
numpy
matplotlib
ultralytics
2. 数据预处理
数据集准备
确保你的数据集按照YOLO格式组织,并包含以下内容:
- 图像文件夹 (
images/) - 标签文件夹 (
labels/) - 数据集配置文件 (
dataset.yaml)
每个图像对应一个同名的.txt文件作为标注文件,其中包含物体的位置信息(边界框坐标)和类别ID。标签文件应只有一种类别,即uav。
# dataset.yaml
train: ./dataset/images/train
val: ./dataset/images/valid
nc: 1 # Number of classes (uav)
names: ['uav']
划分数据集
编写脚本将数据集划分为训练集和验证集,并为每个集合创建相应的标签文件。
import random
import shutil
import os
def split_dataset(src_dir, dst_train_dir, dst_val_dir, val_ratio=0.2):
images = [f for f in os.listdir(os.path.join(src_dir, 'images')) if f.endswith(('png', 'jpg', 'jpeg'))]
labels = [f for f in os.listdir(os.path.join(src_dir, 'labels')) if f.endswith('txt')]
random.shuffle(images)
split_idx = int(len(images) * (1 - val_ratio))
for i, img in enumerate(images):
label = img.replace('.jpg', '.txt').replace('.png', '.txt')
if i < split_idx:
shutil.copy(os.path.join(src_dir, 'images', img), os.path.join(dst_train_dir, 'images', img))
shutil.copy(os.path.join(src_dir, 'labels', label), os.path.join(dst_train_dir, 'labels', label))
else:
shutil.copy(os.path.join(src_dir, 'images', img), os.path.join(dst_val_dir, 'images', img))
shutil.copy(os.path.join(src_dir, 'labels', label), os.path.join(dst_val_dir, 'labels', label))
# 示例调用
split_dataset('path/to/dataset', 'path/to/train', 'path/to/val')
3. 模型定义
假设你已经有了YOLOv8的安装和配置,这里直接定义检测器类。
from ultralytics import YOLO
class YOLOv8Detector:
def __init__(self, model_path='models/yolov8_best.pt', conf_thres=0.5, iou_thres=0.45):
self.model = YOLO(model_path)
self.conf_thres = conf_thres
self.iou_thres = iou_thres
def detect(self, image, conf_thres=None, iou_thres=None):
results = self.model(image, conf=conf_thres or self.conf_thres, iou=iou_thres or self.iou_thres)
return results[0].boxes.cpu().numpy()
def draw_boxes(self, image, boxes, labels=None):
for box in boxes:
x1, y1, x2, y2 = map(int, box.xyxy[0])
cv2.rectangle(image, (x1, y1), (x2, y2), (0, 255, 0), 2)
if labels:
label = labels[int(box.cls)]
cv2.putText(image, label, (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
return image
4. 训练模型
编写训练脚本来启动训练过程。
from yolov8_detector import YOLOv8Detector
def train_model():
detector = YOLOv8Detector(model_path='models/yolov8n.yaml') # 使用预定义配置或自定义模型
results = detector.model.train(data='dataset.yaml', epochs=100, imgsz=640)
if __name__ == '__main__':
train_model()
5. 评估模型
编写评估脚本来测试模型性能,并计算mAP等指标。
from yolov8_detector import YOLOv8Detector
def evaluate_model():
detector = YOLOv8Detector(model_path='runs/detect/train/weights/best.pt') # 加载最佳模型权重
results = detector.model.val(data='dataset.yaml')
print(results)
if __name__ == '__main__':
evaluate_model()
6. 结果分析与可视化
编写脚本以分析和可视化检测结果。
import matplotlib.pyplot as plt
import numpy as np
import cv2
def plot_detection_results(image_paths, detection_results):
fig, axes = plt.subplots(len(image_paths), 1, figsize=(10, len(image_paths) * 5))
if len(image_paths) == 1:
axes = [axes]
for ax, image_path, result in zip(axes, image_paths, detection_results):
image = cv2.imread(image_path)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
for det in result:
x1, y1, x2, y2 = map(int, det.xyxy[0])
cv2.rectangle(image, (x1, y1), (x2, y2), (0, 255, 0), 2)
ax.imshow(image)
ax.axis('off')
plt.tight_layout()
plt.show()
# 示例调用
image_paths = ['path/to/image1.jpg', 'path/to/image2.jpg']
detection_results = [detector.detect(cv2.imread(path)) for path in image_paths]
plot_detection_results(image_paths, detection_results)
7. 集成与部署
使用PyQt6构建图形用户界面,并集成上述功能模块。
PyQt6 GUI (gui.py)
import sys
from PyQt6.QtWidgets import QApplication, QMainWindow, QPushButton, QVBoxLayout, QWidget, QLabel, QFileDialog, QLineEdit, QComboBox
from PyQt6.QtGui import QImage, QPixmap
from PyQt6.QtCore import Qt, QTimer
import cv2
import numpy as np
from yolov8_detector import YOLOv8Detector # 假设这是你的YOLOv8检测器类
class MainWindow(QMainWindow):
def __init__(self):
super().__init__()
self.setWindowTitle("无人机检测系统")
self.setGeometry(100, 100, 800, 600)
self.central_widget = QWidget()
self.setCentralWidget(self.central_widget)
self.layout = QVBoxLayout(self.central_widget)
self.image_label = QLabel(self)
self.layout.addWidget(self.image_label)
self.model_selector = QComboBox(self)
self.model_selector.addItems(['Yolov8', 'Yolov8-Ghost', 'Yolov8-CCFM'])
self.model_selector.currentIndexChanged.connect(self.change_model)
self.layout.addWidget(self.model_selector)
self.load_video_button = QPushButton('选择视频', self)
self.load_video_button.clicked.connect(self.open_file_dialog)
self.layout.addWidget(self.load_video_button)
self.start_camera_button = QPushButton('打开摄像头', self)
self.start_camera_button.clicked.connect(self.start_camera)
self.layout.addWidget(self.start_camera_button)
self.iou_input = QLineEdit(self)
self.iou_input.setPlaceholderText('输入IOU阈值')
self.layout.addWidget(self.iou_input)
self.conf_input = QLineEdit(self)
self.conf_input.setPlaceholderText('输入置信度阈值')
self.layout.addWidget(self.conf_input)
self.save_button = QPushButton('保存结果', self)
self.save_button.clicked.connect(self.save_result)
self.layout.addWidget(self.save_button)
self.models = {
'Yolov8': 'models/yolov8_best.pt',
'Yolov8-Ghost': 'models/yolov8_ghost_best.pt',
'Yolov8-CCFM': 'models/yolov8_ccfm_best.pt'
}
self.detector = YOLOv8Detector(model_path=self.models['Yolov8']) # 默认加载第一个模型
self.timer = QTimer(self)
self.timer.timeout.connect(self.update_frame)
self.video_capture = None
self.current_frame = None
def change_model(self, index):
selected_model = self.model_selector.itemText(index)
self.detector = YOLOv8Detector(model_path=self.models[selected_model])
def open_file_dialog(self):
file_name, _ = QFileDialog.getOpenFileName(self, "选择视频文件", "", "Video Files (*.mp4 *.avi)")
if file_name:
self.start_video(file_name)
def start_camera(self):
self.start_video(0)
def start_video(self, source):
self.video_capture = cv2.VideoCapture(source)
self.timer.start(30) # 设置定时器间隔,单位为毫秒
def update_frame(self):
ret, frame = self.video_capture.read()
if ret:
iou_thres = float(self.iou_input.text()) if self.iou_input.text() else 0.45
conf_thres = float(self.conf_input.text()) if self.conf_input.text() else 0.5
results = self.detector.detect(frame, conf_thres=conf_thres, iou_thres=iou_thres)
frame_with_boxes = self.detector.draw_boxes(frame, results)
rgb_image = cv2.cvtColor(frame_with_boxes, cv2.COLOR_BGR2RGB)
h, w, ch = rgb_image.shape
bytes_per_line = ch * w
convert_to_Qt_format = QImage(rgb_image.data, w, h, bytes_per_line, QImage.Format.Format_RGB888)
p = convert_to_Qt_format.scaled(800, 600, Qt.AspectRatioMode.KeepAspectRatio)
self.image_label.setPixmap(QPixmap.fromImage(p))
self.current_frame = frame_with_boxes
else:
self.timer.stop()
def save_result(self):
if self.current_frame is not None:
file_name, _ = QFileDialog.getSaveFileName(self, "保存图片", "", "Images (*.png *.xpm *.jpg *.bmp *.gif)")
if file_name:
cv2.imwrite(file_name, self.current_frame)
if __name__ == '__main__':
app = QApplication(sys.argv)
window = MainWindow()
window.show()
sys.exit(app.exec())