求取圆形区域内的平均灰度值
#include <cmath>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
const int kvalue = http://blog.csdn.net/kh1445291129/article/details/15;//双边滤波邻域大小
const double PI = 3.14;//圆周率
int graylevel(Mat image, Mat dst, Point cen, int r)//求取圆形区域内的平均灰度值
{
int graysum = 0, n = 0;
for(int i = (cen.y - r); i <= (cen.y + r); ++i)//访问矩形框内的像素值
{
uchar* data = image.ptr(i);
for(int j = (cen.x - r); j <= (cen.x + r); ++j)
{
double d = (i-cen.y)*(i-cen.y) + (j-cen.x)*(j-cen.x);
if(d < r*r)
{
++n;
graysum += (int)data[j];
}
}
}
for(int i = (cen.y - r); i <= (cen.y + r); ++i)//画出圆,圆内像素值为平均灰度值
{
uchar* temp = dst.ptr(i);
for(int j = (cen.x - r); j <= (cen.x + r); ++j)
{
double d = (i-cen.y)*(i-cen.y) + (j-cen.x)*(j-cen.x);
if(d < r*r)
{
temp[j] = (int)(graysum / n);
}
}
}
return(graysum / n);
}
int main()
{
Mat src_color = imread("1.png");//读取原彩色图
imshow("原图-彩色", src_color);
Mat src_gray;//彩色图像转化成灰度图
cvtColor(src_color, src_gray, COLOR_BGR2GRAY);
imshow("原图-灰度", src_gray);
//imwrite("src_gray.png", src_gray);
//声明一个单通道图像,像素值全为0,用来将霍夫变换检测出的圆画在上面
Mat dst(src_gray.size(), src_gray.type());
dst = Scalar::all(0);
Mat bf;//对灰度图像进行双边滤波
bilateralFilter(src_gray, bf, kvalue, kvalue*2, kvalue/2);
//imshow("灰度双边滤波处理", bf);
//imwrite("src_bf.png", bf);
vector circles;//声明一个向量,保存检测出的圆的圆心坐标和半径
HoughCircles(bf, circles, CV_HOUGH_GRADIENT, 1.5, 20, 130, 38, 10, 50);//霍夫变换检测圆
std::vector v;//保存圆心的横坐标减纵坐标的绝对值,用于区分两排灯
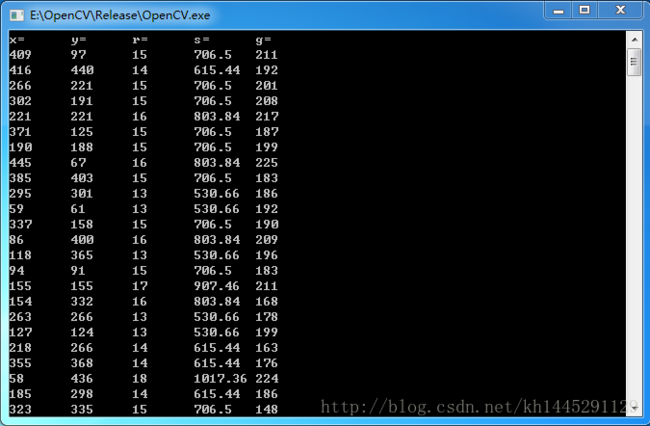
cout << "x=/ty=/tr=/ts=/tg=" << endl;
for(size_t i = 0; i < circles.size(); i++)//把霍夫变换检测出的圆画出来
{
Point center(cvRound(circles[0]), cvRound(circles[1]));
int radius = cvRound(circles[2]);
double s = 0;//计算圆的面积
s = PI * radius * radius;
int average = 0;
average = graylevel(bf, dst, center, radius);//计算平均灰度,并画出圆
circle( dst, center, 2, Scalar(255), -1, 8, 0 );//画出圆心
circle( dst, center, radius, Scalar(255), 1, 8, 0 );//画出圆的轮廓
v.push_back(abs(center.x-center.y));//存储圆心的横坐标减纵坐标的绝对值,用于区分两排灯
cout << center.x << "/t" << center.y << "/t" << radius << "/t" << s << "/t" << average << endl;//在控制台输出圆心坐标和半径
}
sort(v.begin(), v.end());//从小到大排序
std::vector points1, points2;//声明点向量,分别存储两排灯的圆心坐标
for (size_t i = 0; i < circles.size(); i++)//用来区分两排灯
{
Point center(cvRound(circles[0]), cvRound(circles[1]));
if (abs(center.x-center.y) < v[12])
points1.push_back(Point(center.x, center.y));//存储从左上到右下那排灯的圆心坐标
else
points2.push_back(Point(center.x, center.y));//存储从左下到右上那排灯的圆心坐标
}
cv::Vec4f line1, line2;//拟合直线
fitLine(Mat(points1), line1, CV_DIST_L2, 0, 0.01, 0.01);
fitLine(Mat(points2), line2, CV_DIST_L2, 0, 0.01, 0.01);
int x01 = (int)line1[2];
int y01 = (int)line1[3];
int x11 = (int)(x01 + 300*line1[0]);
int y11 = (int)(y01 + 300*line1[1]);
int x21 = (int)(x01 - 300*line1[0]);
int y21 = (int)(y01 - 300*line1[1]);
int x02 = (int)line2[2];
int y02 = (int)line2[3];
int x12 = (int)(x02 + 300*line2[0]);
int y12 = (int)(y02 + 300*line2[1]);
int x22 = (int)(x02 - 300*line2[0]);
int y22 = (int)(y02 - 300*line2[1]);
cv::line(dst, Point(x11, y11), Point(x21, y21), Scalar(255), 1);//画出直线
cv::line(dst, Point(x12, y12), Point(x22, y22), Scalar(255), 1);
imshow("特征提取", dst);
imwrite("chuli.png", dst);
waitKey();
}
源码来自: http://www.eyesourcecode.com/forum-OpenCV-1.html