opencv学习_12 (harris角点检测)
原理:
Harris角点检测最直观的解释是:在任意两个相互垂直的方向上,都有较大变化的点。---harris在A combined corner and edge detector这篇文章中提出来的。

在moravec角点检测中,w(x,y)的取值是二元的,在窗口内部就取值为1,在窗口外部就取值为0,在harris的角点检测中,使用的是高斯窗口,所以w(x,y)表示的是高斯窗口中的权重。此时 当u和v取两组相互垂直的值时,E(u,v)都有较大值的点。
公式推导:

根据二阶taylor展开式得出:

![]()

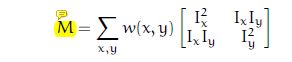
如何考虑E(u,v)在两个相互垂直的方向上都取得最大值呢?我们可以先求出E(u,v)在一个方向上的最大值为r1,即E(u1,v1) = r1,然后求其垂直方向上的值r2,我们意外的发现这里的r1和r2分别对应M的两个特征值,对应的向量(u1,v1),(u2,v2)为M的特征向量,此处的M被称为Hessian矩阵。
判断是否为角点的标准:
r1,r2都很小,对应于图像中的平滑区域
r1,r2都很大,对应于图像中的角点
r1,r2一个很大,一个很小,对应于图像中的边缘
Harris角点量计算公式: R = det(M) – a*trace(M)^2,其中a为经验值,取值范围介于[0.04, 0.06],另一种角点量计算方法:R = det(M)/trace(M)—这个公式自由发挥,只要能反应角点的特征就可以了
其中det(M) = r1*r2 = AB –C^2
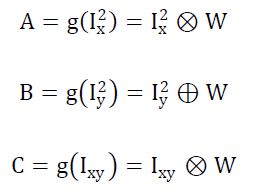
Trace(M) = r1+r2 =A+B (其中A=Ix^2;; B = Iy^2;;; C=IxIy)
角点检测的步骤
根据上述的讨论,harris角点检测的步骤可以总结为:
<1>计算图像I(x,y)在x和y两个方向的梯度Ix,Iy:

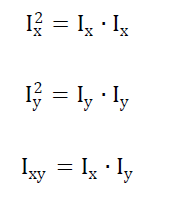
<2>计算梯度方向的乘积
<3>使用高斯核对Ix^2,Iy^2,IxIy进行加权,计算矩阵M的元素A,B,C
<4>根据计算角点量,并设定阀值,当角点量小于阀值,不是候选角点
<5>进行局部极大值抑制
代码:
#include <iostream>
#include "cv.h"
#include "cxcore.h"
#include "highgui.h"
using namespace std;
//harris 角点检测需要的参数
typedef struct HARRISPARAMS
{
int gaussSize; //高斯窗口
float gaussSigma; //高斯方差
double threshold; //对角点量设定的阈值
int maximumSize; //局部极大值抑制时的窗口大小
}HARRISPARAMS,*PHARRISPARAMS;
/*******************************
*对源图像进行卷积运算
*输入项
*srcFloat 源图像
*Ix 卷积的结果
*dxTemplate 卷积模板
*widthTemplate 模板的宽度
*heightTemplate 模板的高度
********************************/
void convolution(IplImage* srcFloat,IplImage* Ix,double* dxTemplate , int widthTemplate,int heightTemplate);
/***************************
*harris角点检测函数
*输入项
*srcIn 源图像
*params harris角点检测需要的参数
*corners 存放harris角点坐标
****************************/
void getHarrisPoints(IplImage* srcIn,PHARRISPARAMS params,CvSeq* corners);
//主函数
int main(int argc, char* argv[])
{
//相关变量
IplImage* src,*srcGray;
CvMemStorage* mem = cvCreateMemStorage(0);
CvSeq* harrisPoints;
HARRISPARAMS harrisParams;
src = cvLoadImage("E:\\study_opencv_video\\lesson17_2\\2.jpg");//源图像
srcGray = cvCreateImage(cvGetSize(src),8,1); // 灰度图像
if(!src)
{
cout << " src is null";
return 0;
}
cvCvtColor(src,srcGray,CV_BGR2GRAY);
//harris角点保存的空间 角点坐标保存在一个序列中
harrisPoints = cvCreateSeq(0,sizeof(CvSeq),sizeof(CvPoint),mem);
//设置相关参数
harrisParams.gaussSize = 5; // 高斯窗口的大小
harrisParams.gaussSigma = 0.8;
harrisParams.threshold = 1000;
harrisParams.maximumSize = 21;
//进行harris角点检测
getHarrisPoints(srcGray,&harrisParams,harrisPoints);
//获取每一个角点的坐标
for(int x=0;x<harrisPoints->total;x++)
{
//获取第x个角点的坐标
CvPoint* pt = (CvPoint*)cvGetSeqElem(harrisPoints,x);
//以角点坐标为中心 绘制一个半径为5的圆
cvCircle(src,*pt,2,cvScalar(255,0,255,0));
}
//cvSaveImage("dst.jpg",src);
//显示图像
cvNamedWindow("dst");
cvShowImage("dst",src);
cvWaitKey(0);
//释放资源
cvReleaseImage(&src);
cvReleaseImage(&srcGray);
cvReleaseMemStorage(&mem);
return 0;
}
/***************************
*harris角点检测函数
*输入项
*srcIn 源图像
*params harris角点检测需要的参数
*corners 存放harris角点坐标
****************************/
void getHarrisPoints(IplImage* srcIn,PHARRISPARAMS params,CvSeq* corners)
{
int x,y;
IplImage* srcFloat;
srcFloat = cvCreateImage(cvGetSize(srcIn),32,1);
cvConvertScale(srcIn,srcFloat);
IplImage *Ix,*Iy,*IxIx,*IyIy,*IxIy,*A,*B,*C,*cornerness;
double *gaussWindow = new double[sizeof(double)*params->gaussSize*params->gaussSize];
//水平方向差分算子并求Ix
double dxTemplate[9]={-1,0,1,
-1,0,1,
-1,0,1};
//垂直方向差分算子并求Iy
double dyTemplate[9]={-1,-1,-1,
0, 0, 0,
1, 1, 1};
//此处内存用得有点奢侈 请大家自行修改 节省内存
//下面变量的含义与 第二十四集harris角点检测数学原理 的文档资料中定义的变量含义是一样的 请参阅
Ix = cvCreateImage(cvGetSize(srcFloat),32,1);
Iy = cvCreateImage(cvGetSize(srcFloat),32,1);
IxIx = cvCreateImage(cvGetSize(srcFloat),32,1);
IyIy = cvCreateImage(cvGetSize(srcFloat),32,1);
IxIy = cvCreateImage(cvGetSize(srcFloat),32,1);
A = cvCreateImage(cvGetSize(srcFloat),32,1);
B = cvCreateImage(cvGetSize(srcFloat),32,1);
C = cvCreateImage(cvGetSize(srcFloat),32,1);
cornerness = cvCreateImage(cvGetSize(srcFloat),32,1); //保存角点量
convolution(srcFloat,Ix,dxTemplate,3,3); //计算Ix
convolution(srcFloat,Iy,dyTemplate,3,3); //计算Iy
//计算Ix2、Iy2、IxIy
for(y=0;y<srcFloat->height;y++)
{
for(x=0;x<srcFloat->width;x++)
{
float IxValue,IyValue;
IxValue = cvGetReal2D(Ix,y,x);
IyValue = cvGetReal2D(Iy,y,x);
cvSetReal2D(IxIx,y,x,IxValue*IxValue);
cvSetReal2D(IyIy,y,x,IyValue*IyValue);
cvSetReal2D(IxIy,y,x,IxValue*IyValue);
}
}
//计算高斯窗口
for( y=0;y<params->gaussSize;y++)
{
for( x=0;x<params->gaussSize;x++)
{
float dis,weight;
dis = (y-params->gaussSize/2)*(y-params->gaussSize/2)+(x-params->gaussSize/2)*(x-params->gaussSize/2);
weight = exp(-dis/(2.0*params->gaussSigma));
*(gaussWindow+y*params->gaussSize+x)=weight;
}
}
convolution(IxIx,A,gaussWindow,params->gaussSize,params->gaussSize);//计算IxIx与高斯的卷积
convolution(IyIy,B,gaussWindow,params->gaussSize,params->gaussSize);//计算IyIy与高斯的卷积
convolution(IxIy,C,gaussWindow,params->gaussSize,params->gaussSize);//计算IxIy与高斯的卷积
//计算角点量
for(y=0;y<srcFloat->height;y++)
{
for(x=0;x<srcFloat->width;x++)
{
double cornernessValue,Avalue,Bvalue,Cvalue;
Avalue = cvGetReal2D(A,y,x);
Bvalue = cvGetReal2D(B,y,x);
Cvalue = cvGetReal2D(C,y,x);
cornernessValue = (Avalue*Bvalue-Cvalue*Cvalue)/(Avalue+Bvalue+0.0000001);
cvSetReal2D(cornerness,y,x,fabs(cornernessValue));
}
}
//计算局部极大值 及 极大值是否大于阈值
int beginY,endY,beginX,endX;
int halfWinSize = params->maximumSize/2;
beginY = halfWinSize;
endY = cornerness->height - halfWinSize;
beginX = halfWinSize;
endX = cornerness->width - halfWinSize;
for(y=beginY;y<endY;)
{
for(x=beginX;x<endX;)
{
//寻找局部极大值 及其位置信息
float maxValue=0;
int flag = 0 ;
CvPoint maxLoc;
maxLoc.x = -1;
maxLoc.y = -1;
//首先计算以点(x,y)位中心的maximumSize*maximumSize的窗口内部的局部极大值
for(int winy=-halfWinSize;winy<=halfWinSize;winy++)
{
for(int winx=-halfWinSize;winx<=halfWinSize;winx++)
{
float value ;
value = cvGetReal2D(cornerness,y+winy,x+winx);
//计算该窗口内 最大值 保存到max 并保存其坐标到maxLoc
if(value>maxValue)
{
maxValue = value;
maxLoc.x = x+winx;
maxLoc.y = y+winy;
flag = 1;
}
}
}
//如果找到局部极大值 并且该值大于预先设定的阈值 则认为是角点
if(flag==1 && maxValue>params->threshold)
{
cvSeqPush(corners,&maxLoc);
}
x = x+params->maximumSize;
}
y = y + params->maximumSize;
}
delete []gaussWindow;
cvReleaseImage(&Ix);
cvReleaseImage(&Iy);
cvReleaseImage(&IxIx);
cvReleaseImage(&IyIy);
cvReleaseImage(&IxIy);
cvReleaseImage(&A);
cvReleaseImage(&B);
cvReleaseImage(&C);
cvReleaseImage(&cornerness);
cvReleaseImage(&srcFloat);
}
/*******************************
*对源图像进行卷积运算
*输入项
*srcFloat 源图像
*Ix 卷积的结果
*dxTemplate 卷积模板
*widthTemplate 模板的宽度
*heightTemplate 模板的高度
********************************/
void convolution(IplImage* srcFloat,IplImage* Ix,double* dxTemplate , int widthTemplate,int heightTemplate)
{
int x,y,beginY,endY,beginX,endX;
beginY = heightTemplate/2;
endY = srcFloat->height - heightTemplate/2;
beginX = widthTemplate/2;
endX = srcFloat->width - widthTemplate/2;
for(y=beginY;y<endY;y++)
{
for(x=beginX;x<endX;x++)
{
int i,j;
double curDx=0;
for(i=0;i<heightTemplate;i++)
{
for(j=0;j<widthTemplate;j++)
{
curDx += cvGetReal2D(srcFloat,y+i-heightTemplate/2,x+j-widthTemplate/2)**(dxTemplate+i*widthTemplate+j);
}
}
cvSetReal2D(Ix,y,x,curDx);
}
}
}
作者:小村长 出处:http://blog.csdn.net/lu597203933 欢迎转载或分享,但请务必声明文章出处。 (新浪微博:小村长zack, 欢迎交流!)