OpenCV 轮廓检测
使用OpenCV可以对图像的轮廓进行检测。这是之前用过的代码,挺简单的,回顾一下。主要要进行以下2步操作:
1.cvThreshold():对图像进行二值化处理
2.cvFindContours():查找图像轮廓
注意:这个过程中图像要转化为灰度图。
/***********************************************************************
雷霄骅
***********************************************************************/
#include "stdafx.h"
#include "cv.h"
#include "cxcore.h"
#include "highgui.h"
int main( int argc, char** argv )
{
//声明IplImage指针
IplImage* pImg = NULL;
IplImage* pContourImg = NULL;
CvMemStorage * storage = cvCreateMemStorage(0);
CvSeq * contour = 0;
int mode = CV_RETR_EXTERNAL;
if( argc == 3)
if(strcmp(argv[2], "all") == 0)
mode = CV_RETR_CCOMP; //内外轮廓都检测
//创建窗口
cvNamedWindow("src", 1);
cvNamedWindow("contour",1);
cvNamedWindow("threshold",1);
//载入图像,强制转化为Gray
if( argc >= 2 &&
(pImg = cvLoadImage( argv[1], 0)) != 0 )
{
cvShowImage( "src", pImg );
//为轮廓显示图像申请空间
//3通道图像,以便用彩色显示
pContourImg = cvCreateImage(cvGetSize(pImg),
IPL_DEPTH_8U,
3);
//copy source image and convert it to BGR image
cvCvtColor(pImg, pContourImg, CV_GRAY2BGR);
//----阈值分割-------------------------------------------
cvThreshold( pImg, pImg, 150, 255, CV_THRESH_BINARY );
cvShowImage( "threshold", pImg );
//-----------------------------------------------
//查找contour----------------输入必须是二值图像
cvFindContours( pImg, storage, &contour, sizeof(CvContour),
mode, CV_CHAIN_APPROX_SIMPLE, cvPoint(0,0));
}
else
{
//销毁窗口
cvDestroyWindow( "src" );
cvDestroyWindow( "contour" );
cvReleaseMemStorage(&storage);
return -1;
}
//将轮廓画出
cvDrawContours(pContourImg, contour,
CV_RGB(0,0,255), CV_RGB(255, 0, 0),
2, 2, 8, cvPoint(0,0));
//显示图像
cvShowImage( "contour", pContourImg );
cvWaitKey(0);
//销毁窗口
cvDestroyWindow( "src" );
cvDestroyWindow( "contour" );
//释放图像
cvReleaseImage( &pImg );
cvReleaseImage( &pContourImg );
cvReleaseMemStorage(&storage);
return 0;
}
源图像:

二值化以后:

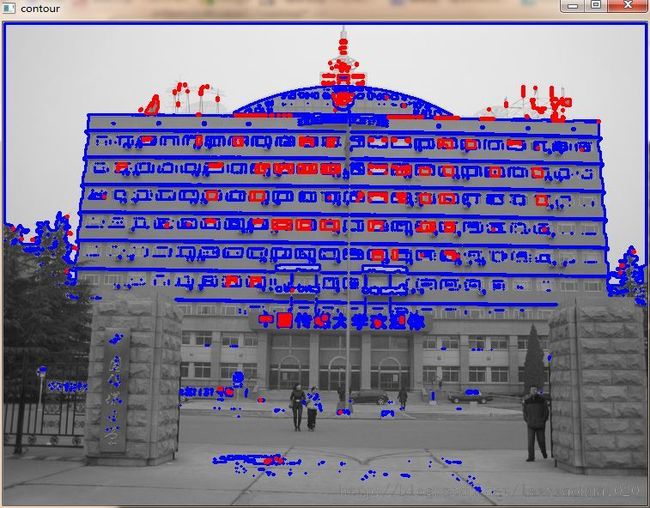
轮廓: