高斯平滑 高斯模糊 高斯滤波器 ( Gaussian Smoothing, Gaussian Blur, Gaussian Filter ) C++ 实现
发展到现在这个平滑算法的时候, 我已经完全不知道如何去命名这篇文章了, 只好罗列出一些关键字来方便搜索了.
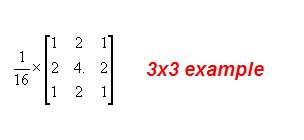
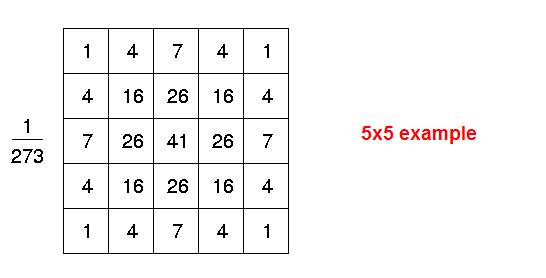
在之前我们提到过了均值滤波器, 就是说某像素的颜色, 由以其为中心的九宫格的像素平均值来决定. 在这个基础上又发展成了带权的平均滤波器, 这里的高斯平滑或者说滤波器就是这样一种带权的平均滤波器. 那么这些权重如何分布呢? 我们先来看几个经典的模板例子:
尝试了使用这些滤波器对我们原来的图进行操作, 得到了这样的一组结果:
原图:

3x3 高斯:

5x5 高斯:

单纯从效果来看, 两个模板都起到了平滑的作用, 只是程度有深浅的区分. 那么从理论上来说为什么能起到平滑的作用呢? 很显然, 像素的颜色不仅由自身决定了, 同时有其周围的像素加权决定, 客观上减小了和周围像素的差异. 同时这些权重的设定满足了越近权重越大的规律. 从理论来讲, 这些权重的分布满足了著名的所谓高斯分布:
 这就是1维的计算公式
这就是1维的计算公式
 这就是2维的计算公式
这就是2维的计算公式
x, y表示的就是当前点到对应点的距离, 而那些具体的模板就是由这里公式中的一些特例计算而来. 需要说明的是不只有这么一些特例, 从wikipedia可以方便地找到那些复杂的模板比如像:
Sample Gaussian matrix
This is a sample matrix, produced by sampling the Gaussian filter kernel (with σ = 0.84089642) at the midpoints of each pixel and then normalising. Note that the center element (at [4, 4]) has the largest value, decreasing symmetrically as distance from the center increases.
| 0.00000067 | 0.00002292 | 0.00019117 | 0.00038771 | 0.00019117 | 0.00002292 | 0.00000067 |
| 0.00002292 | 0.00078633 | 0.00655965 | 0.01330373 | 0.00655965 | 0.00078633 | 0.00002292 |
| 0.00019117 | 0.00655965 | 0.05472157 | 0.11098164 | 0.05472157 | 0.00655965 | 0.00019117 |
| 0.00038771 | 0.01330373 | 0.11098164 | 0.22508352 | 0.11098164 | 0.01330373 | 0.00038771 |
| 0.00019117 | 0.00655965 | 0.05472157 | 0.11098164 | 0.05472157 | 0.00655965 | 0.00019117 |
| 0.00002292 | 0.00078633 | 0.00655965 | 0.01330373 | 0.00655965 | 0.00078633 | 0.00002292 |
| 0.00000067 | 0.00002292 | 0.00019117 | 0.00038771 | 0.00019117 | 0.00002292 | 0.00000067 |
是不是看到就头大了:) 不过没关系, 对于一般的应用来说, 前面的例子已经可以完成任务了. 代码的话我们还是给一份5x5的example:
/** ** method to remove noise from the corrupted image by gaussian filter value * @param corrupted input grayscale binary array with corrupted info * @param smooth output data for smooth result, the memory need to be allocated outside of the function * @param width width of the input grayscale image * @param height height of the input grayscale image */ void gaussianFilter2 (unsigned char* corrupted, unsigned char* smooth, int width, int height) { int templates[25] = { 1, 4, 7, 4, 1, 4, 16, 26, 16, 4, 7, 26, 41, 26, 7, 4, 16, 26, 16, 4, 1, 4, 7, 4, 1 }; memcpy ( smooth, corrupted, width*height*sizeof(unsigned char) ); for (int j=2;j<height-2;j++) { for (int i=2;i<width-2;i++) { int sum = 0; int index = 0; for ( int m=j-2; m<j+3; m++) { for (int n=i-2; n<i+3; n++) { sum += corrupted [ m*width + n] * templates[index++] ; } } sum /= 273; if (sum > 255) sum = 255; smooth [ j*width+i ] = sum; } } }
附带说一些,很明显,和均值滤波器类似, 这个滤波器没有消除校验噪声的作用.