图像特征提取4:Surf特征
一、Surf描述子形成步骤
1. 构造高斯金字塔尺度空间
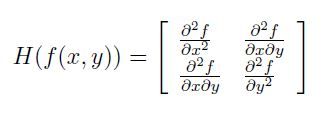
其实surf构造的金字塔图像与sift有很大不同,就是因为这些不同才加快了其检测的速度。Sift采用的是DOG图像,而surf采用的是Hessian矩阵行列式近似值图像。首先来看看图像中某个像素点的Hessian矩阵,如下:
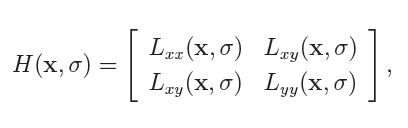
即每一个像素点都可以求出一个Hessian矩阵。但是由于我们的特征点需要具备尺度无关性,所以在进行Hessian矩阵构造前,需要对其进行高斯滤波。这样,经过滤波后在进行Hessian的计算,其公式如下:
为了减小计算量,作者利用了积分图像来计算上式(大大的减少计算量),方法其实很简单就是在高斯模糊的基础上将原来的模块近似下。
对于一般计算图像的二阶导时,我们利用公式d2f(x)/dx2=(f(x+1)-f(x))-(f(x)-f(x-1))=-2*f(x)+f(x+1)+f(x-1)。但是f(x)=g(h(x))【h(x)为图像的灰度值,f(x)是将h(x)高斯滤波处理的灰度函数 】
以9X9滤波器为例,如上图所示,左边两幅图分别为灰度图像在中心点(黑色点)处的二阶导数d2f(x)/dx2和d2f(x)/dxdy的模板对应的值, 近似后变成右边的两幅图,图中灰色部分像素值为0。但是这样计算特征值也很复杂,所以作者提供了一种新思路--使用积分图像。
绿色的部分为当前像素点,红色为积分区域。这样计算图像中任意一块矩形区域的灰度之和Sx只需要利用矩形4个顶点(Xi,Yi)(i=1,2,3,4 顺序为从上之下,先左后右)的积分值S(x,y)即可。
Sx=S(X1,Y1)+ S(X4,Y4)-S(X2,Y2)-S(X3,Y3)读者从以上应该可以看出积分图像的好处了,我们只要在函数定义之前计算积分图像,然后就能快速求出hessian的特征值。
最终我们要的是原图像的一个变换图像,因为我们要在这个变换图像上寻找特征点,然后将其位置反映射到原图中,例如在sift中,我们是在原图的DOG图上寻找特征点的。那么在surf中,这个变换图是什么呢?就是原图每个像素的Hessian矩阵行列式的近似值构成的。其行列式近似公式如下:
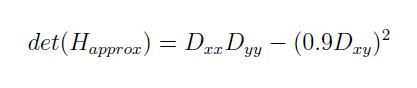
这里Dxx和Dxy就是根据Figure2得到的,其中0.9是作者给出的一个经验值,其实它是有一套理论计算的,具体去看surf的英文论文。
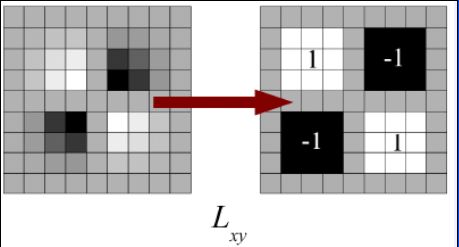
由于求Hessian时要先高斯平滑,然后求二阶导数,这在离散的像素点是用模板卷积形成的,这2中操作合在一起用一个模板代替就可以了,比如说y方向上的模板如下:
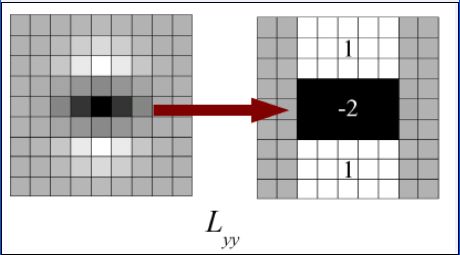
该图的左边即用高斯平滑然后在y方向上求二阶导数的模板,为了加快运算用了近似处理,其处理结果如右图所示,这样就简化了很多。并且右图可以采用积分图来运算,大大的加快了速度,关于积分图的介绍,可以去查阅相关的资料。
同理,x和y方向的二阶混合偏导模板如下所示:
上面讲的这么多只是得到了一张近似hessian行列式图,这例比sift中的DOG图,但是在金字塔图像中分为很多层,每一层叫做一个octave,每一个octave中又有几张尺度不同的图片。在sift算法中,同一个octave层中的图片尺寸(即大小)相同,但是尺度(即模糊程度)不同,而不同的octave层中的图片尺寸大小也不相同,因为它是由上一层图片降采样得到的。在进行高斯模糊时,sift的高斯模板大小是始终不变的,只是在不同的octave之间改变图片的大小。而在surf中,图片的大小是一直不变的,不同的octave层得到的待检测图片是改变高斯模糊尺寸大小得到的,当然了,同一个octave中的图片用到的高斯模板尺度也不同。Surf采用这种方法节省了降采样过程,其处理速度自然也就提上去了。其金字塔图像如下所示:

2. 利用非极大值抑制初步确定特征点
此步骤和sift类似,将经过hessian矩阵处理过的每个像素点与其3维领域的26个点进行大小比较,如果它是这26个点中的最大值或者最小值,则保留下来,当做初步的特征点。
3. 精确定位极值点
这里也和sift算法中的类似,采用3维线性插值法得到亚像素级的特征点,同时也去掉那些值小于一定阈值的点。
4. 选取特征点的主方向。
这一步与sift也大有不同。Sift选取特征点主方向是采用在特征点领域内统计其梯度直方图,取直方图bin值最大的以及超过最大bin值80%的那些方向做为特征点的主方向。而在surf中,不统计其梯度直方图,而是统计特征点领域内的harr小波特征。即在特征点的领域(比如说,半径为6s的圆内,s为该点所在的尺度)内,统计60度扇形内所有点的水平haar小波特征和垂直haar小波特征总和,haar小波的尺寸变长为4s,这样一个扇形得到了一个值。然后60度扇形以一定间隔进行旋转,最后将最大值那个扇形的方向作为该特征点的主方向。该过程的示意图如下:

5. 构造surf特征点描述算子
在sift中,是在特征点周围取16*16的邻域,并把该领域化为4*4个的小区域,每个小区域统计8个方向梯度,最后得到4*4*8=128维的向量,该向量作为该点的sift描述子。
在surf中,也是在特征点周围取一个正方形框,框的边长为20s(s是所检测到该特征点所在的尺度)。该框带方向,方向当然就是第4步检测出来的主方向了。然后把该框分为16个子区域,每个子区域统计25个像素的水平方向和垂直方向的haar小波特征,这里的水平和垂直方向都是相对主方向而言的。该haar小波特征为水平方向值之和,水平方向绝对值之和,垂直方向之和,垂直方向绝对值之和。该过程的示意图如下所示:
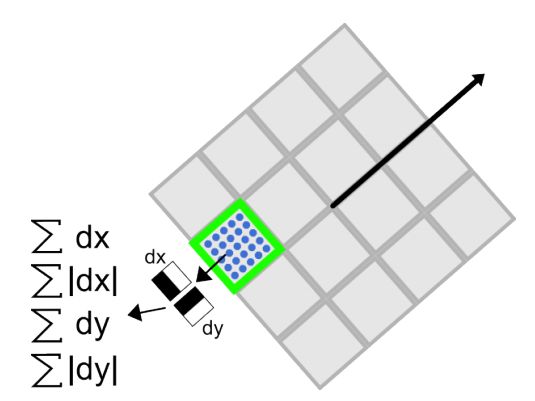
这样每个小区域就有4个值,所以每个特征点就是16*4=64维的向量,相比sift而言,少了一半,这在特征匹配过程中会大大加快匹配速度。
二、特征点的匹配过程
surf特征点的匹配过程和sift类似,这里不做详细介绍