启发式搜索算法A*(2)
原文:http://www.cnblogs.com/yanlingyin/archive/2012/01/15/2322640.html
在看下面这篇文章之前,先介绍几个理论知识,有助于理解A*算法。
启发式搜索:启发式搜索就是在状态空间中的搜索对每一个搜索的位置进行评估,得到最好的位置,再从这个位置进行搜索直到目标。这样可以省略大量无畏的搜索路径,提到了效率。在启发式搜索中,对位置的估价是十分重要的。采用了不同的估价可以有不同的效果。
估价函数:从当前节点移动到目标节点的预估费用;这个估计就是启发式的。在寻路问题和迷宫问题中,我们通常用曼哈顿(manhattan)估价函数(下文有介绍)预估费用。
A*算法与BFS:可以这样说,BFS是A*算法的一个特例。对于一个BFS算法,从当前节点扩展出来的每一个节点(如果没有被访问过的话)都要放进队列进行进一步扩展。也就是说BFS的估计函数h永远等于0,没有一点启发式的信息,可以认为BFS是“最烂的”A*算法。
选取最小估价:如果学过数据结构的话,应该可以知道,对于每次都要选取最小估价的节点,应该用到最小优先级队列(也叫最小二叉堆)。在C++的STL里有现成的数据结构priority_queue,可以直接使用。当然不要忘了重载自定义节点的比较操作符。
A*算法的特点:A*算法在理论上是时间最优的,但是也有缺点:它的空间增长是指数级别的。
IDA*算法:这种算法被称为迭代加深A*算法,可以有效的解决A*空间增长带来的问题,甚至可以不用到优先级队列。如果要知道详细:google一下。
开篇
这篇文章介绍找最短路径的一种算法,它的字我比较喜欢:启发式搜索。
标题上写的是翻译,只是觉得原文讲解的思路很清晰。这篇文章整体构思和原文相差不多,只是有些地方有小的改动,
我想的是用更容易理解的方式、更简洁的把A*算法的思想呈现出来。
文章中出现的词openlist,closelist我觉得用原文会更好故没有翻译,在文中会有解释。
原文地址http://www.gamedev.net/page/resources/_/technical/artificial-intelligence/a-pathfinding-for-beginners-r2003
各位也可以直接参考原文。
网上关于A*算法的文章还有很多,只是那些都需要有一定的基础,对于入门的好文章不多,而这篇文章就是为初学者而写的,很适合入门的一篇。文章定位:非专业性A*文章,很适合入门。
有图有真相,先给大家看个效果图吧:从图的左下角到右上角寻找最短路径,灰色部分是障碍物。
这是用一般的搜素方法,类似穷举的效果
下面的图是用A*搜素的效果,也就是本文要介绍的算法。
可以看出,用A*算法减少了许多计算量,它的效率有了显著的提高。
下面将为你解答上图中的算法是如何实现的。
图片来源:http://en.wikipedia.org/wiki/A*_search_algorithm
正文
搜索区域介绍
下图是这篇文章讨论的中心:
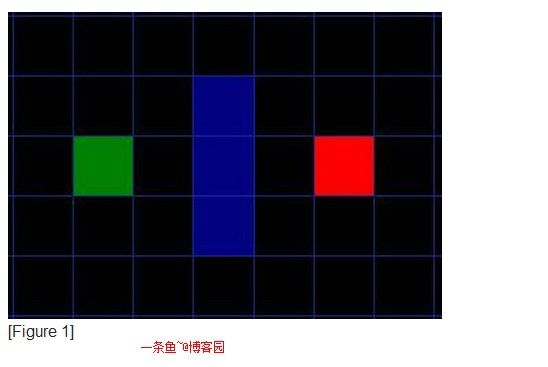
图中左边的绿色点是搜索的起点A,目标点是右边的红色点B,中间被障碍物挡住(蓝色部分)。
我们的目的是从起点出发,找到一条到达目标点的最短路径。
把整个图都分为一个个小方块只是为了这样方便讨论,更多的应用中,也可以把图分为其它方块的组合。
开始搜索
目标是找出从A点出发到B的最短路径,所以我们从A点开始搜索,直到找到目标B。
搜索的步骤是这样的:
1、从起点A开始把A加入到openlist中。openlist解释:它是一个队列,里面元素是一些方块,它们有可能构成最短路径。现在队列中只有元 素A,以后会加入更多的元素。以后会对里的元素进行检查,从里面来找到构成最短路径的元素。
2、看起点A周围的元素是否可达(是否能从A到达它们)把从A可到达的元素加入到openlist中,并且加入到openlist中的节点维护一个指指针,指向他的父亲,也即A点。如果A周围有障碍物就忽略它。从这个图看, A周围把个元素都可达,所以把它们都加到openlist中。
3、把起点A放入closelist中,在closelist中的点意味着以后不需要再去考虑它了。对于A节点,A可达的点都加入到了openlist中,以后也就不用考虑A的情况了。
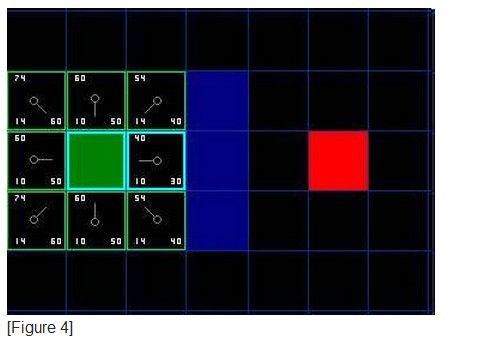
经过以上三步操作后的效果图如下所示
图中被暗绿色包围的就是openlist中的点,一共八个,都是从起点A可达的点,并且他们中的每个都有一个指向他们父节点的指针(图中的小针方向)被高亮绿色包围的表示closelist中的点,可以看出起点A已经在closelist中。
路径选择
从起点出发 ,下一步可以走的点现在有八个,选取哪一个作为下一步的点呢?正常的思维是选取一个离目标值最进,且在这些点中离远点最近的点。
本文的思路也是这样的,文中用
F = G + H
表示,其中:
对于每个点,都有自己的G、H、F。
其中G表示从特定的点到起点的距离,H表示从该点到目标的估值,那么F就是经过该点路径的估值。
下面详细介绍
G:从起点到特定节点的距离,也就是G的父节点加上从G的父节点到起点A的距离g。图中是边长为10的正方形块,所以就是G的父节点的值g
加上10(上下左右相邻)或者加上14(斜块相邻、也就是对角线的长度,本来是14.14、、为了方便计算这里取近似值)
H:H能用很多方法得到估计值.这里用到的方法称为Manhattan method,H的值就是从考虑的点通过水平和垂直移动达到目标点的移动步数乘10(正方形块的边长为10).注意只是水平和垂直移动,不走斜线。并且忽略图中的障碍物。
插一句:
看了对H的描述,你可能会怀疑这种估计的精确性,有一点是可以肯定的:估计值越接近真实值,算法就能更块的找出最短路径。我们用的这种方法确实是做了估计,只是这种估计准确性不高,就是说只是粗略的估计,因为这种方法容易理解,所以才采用这种方法。可以想到,太过接近的估值最后不一定能得到想要的结果。关于估值函数想了解更多请参见:http://www.policyalmanac.org/games/heuristics.htm
为了从openlist中选取一个点继续搜索,就要计算出openlist中的每个点的F、H、G的值然后选取F小的一个点,进行下一步的探索。
对于上图中的点,他们的F、G、H的值在图中都有标明。
F、H、G的位置在起点右边的点中已经有标注,其他点的位置同理。
现在看起点右边的点(也就是标有字母的点)G=10,因为在起点正左边。H=30,水平移动三个格子可以到目标点B。F=G+H=40
继续搜索
由于我们的目的是找最短路径 ,下一步就从openlist中选取F最小的点做进一步的搜索,按如下步骤进行:
(为了方便描述,把选取的点成为点M)
1、检查M周围的点,在closelist中则忽略它,如果可达且不在openlist中,则加入openlist中,同理的维护一个指向父节点的指正,同时计算加入点的F H G 值。
2、如果M周围的点在openlist中,则看从起点A通过M到这类点的路径是不是小于他们的G值,如果是则更新他们的G、F值(更新为小的)。如果不是则不做任何操作。
3、把M从openlist中移除,加入closelist中。
对openlist中F最小的点(也就是起点左边的点)的处理效果如下图所示:
M的右边、右上、右下是障碍物,所以忽略他们。M的左边点在closelist中,也不去管他,剩下的是M的上、下、左上、左下的点。他们已经在openlist中,所以看从起点通过M到他们的距离是不是小于他们的G值。通过判断,都比他们的G值大,所以做任何操作。
可以看出,现在的closelist已有两个元素了(高亮绿色包围的块)
下一步的操作和上面叙述的一样,从openlist中找出F最小的,重复上的操作。从图中可以看出,现在的openlist中F最小的有两个,就是刚刚考虑的点的正上方和正下方,其实这里选哪个都无所谓,只是人们习惯于选择较晚加入到openlist中的元素,这里选择下方的点。
同理,处理效果如下图所示:
下面简单的说下处理过程:
暂且称现在处理的点为N吧。
N上方 在closelist中,不考虑。
N左方 在openlist中,看从原点通过N到它的距离为14+10大于10,不做操作,跳到下一步
N的左下方,下方 加入openlist中,同时记录F、G 、H的值还有指向父节点的指针。
N的右下方这里看做“不可达的点”原因是这两个点都处于障碍物的对角上,当然这只是一种人为的规定。也可以取消这条规定就把它加入到openlist中。这只是一种规定,不必深究。
处理的结果是closelist中现在有三个元素,用高亮的蓝色标记,同样的,openlist中的元素用暗绿色标记出。
重复上的步骤,每次从openlist中选取F最小的点加入closelist中,同时处理这个点周围的元素。。
直到目标节点也被加入到closelist中停止。
处理的效果如下图所示:
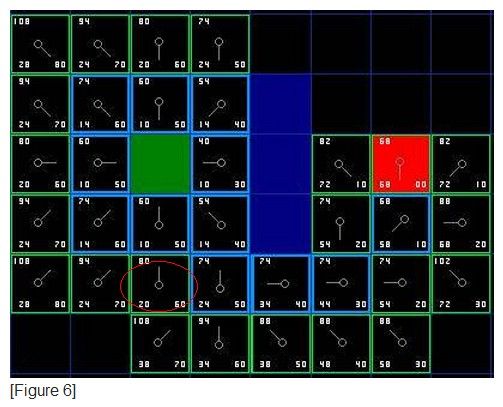
如果用心看、你也许已经发现了,在起点正下方两个点的G值,没错,就是图中用椭圆圈起来的点,之前的G=28,现在是20。这是在算法进行的时候更新的,可能 是这其中的某一步,处理这个点的时候,发现了一条更短的路径20,替换了原来的28。
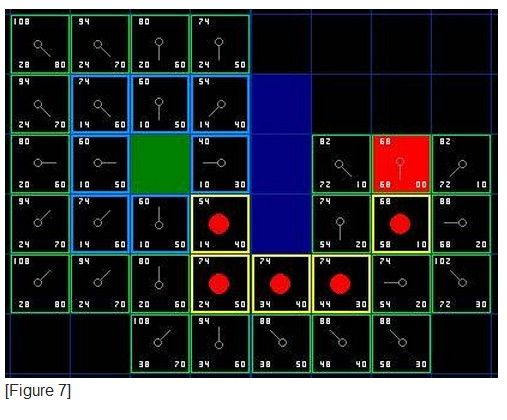
到这里,问题已经基本解决了,最后的任务就是得到这条路径。
只要从目标点出发,沿着他们的父节点遍历,直到起点。就得到了一条最短路径。
如下图所示
总结
现在你应该对A*算法有一个初步的认识了吧,总结下算法的实现过程:
1、把起点加入到openlist中
2、重复以下步骤
a、从openlist中找出F最小的节点,并把它当做当前的操作节点
b、检查当前点周围的点,如果已经在openlist中看是否能通过当前点得到更小的G,如果能就更新那个点的G,F的值,如果在closelist中或者是障碍物(不可达)则忽略他们
c、把当前点从openlist中移除 ,加入closelist中
d、当目标点加入closelist中时停止
3、保存路径,从目标点出发,按照父节点指针遍历,直到找到起点。
后记
其实启发式搜索就是对穷举的一种优化,让每次搜索都更接近目标。这就要通过估值函数实现,对于这类问题,找到一个估值函数是关键。
估值函数:从当前点出发到目标点的花费。其实从这个理念上说,好像和分支界限法有些类似,都是在穷举的基础上对搜素优化。