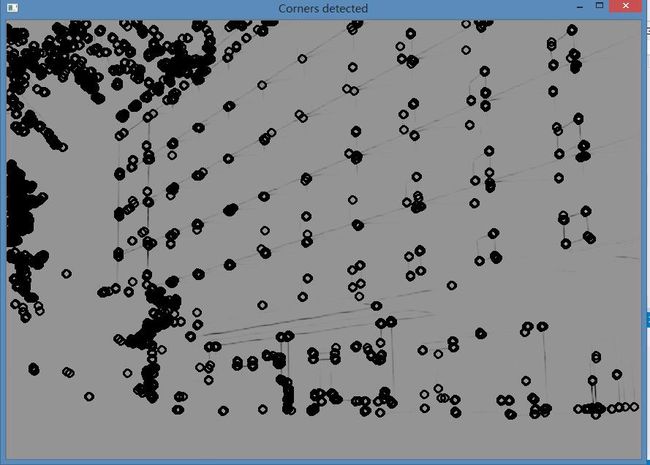
opencv-Harris 角点检测
本文实现例程见opencv英文教程feature2d module.2D Features framework->Harris corner detector
具体算法用到了泰勒展开式,求取窗口内像素值最大变化点,即角点位置
/**
* @function cornerHarris_Demo.cpp
* @brief Demo code for detecting corners using Harris-Stephens method
* @author OpenCV team
*/
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
using namespace cv;
using namespace std;
/// Global variables
Mat src, src_gray;
int thresh = 200;
int max_thresh = 255;
const char* source_window = "Source image";
const char* corners_window = "Corners detected";
/// Function header
void cornerHarris_demo( int, void* );
/**
* @function main
*/
int main( int, char** argv )
{
/// Load source image and convert it to gray
src = imread( argv[1], 1 );
cvtColor( src, src_gray, COLOR_BGR2GRAY );
/// Create a window and a trackbar
namedWindow( source_window, WINDOW_AUTOSIZE );
createTrackbar( "Threshold: ", source_window, &thresh, max_thresh, cornerHarris_demo );
imshow( source_window, src );
cornerHarris_demo( 0, 0 );
waitKey(0);
return(0);
}
/**
* @function cornerHarris_demo
* @brief Executes the corner detection and draw a circle around the possible corners
*/
void cornerHarris_demo( int, void* )
{
Mat dst, dst_norm, dst_norm_scaled;
dst = Mat::zeros( src.size(), CV_32FC1 );
/// Detector parameters
int blockSize = 2;
int apertureSize = 3;
double k = 0.04;
/// Detecting corners
cornerHarris( src_gray, dst, blockSize, apertureSize, k, BORDER_DEFAULT );
/// Normalizing
normalize( dst, dst_norm, 0, 255, NORM_MINMAX, CV_32FC1, Mat() );
convertScaleAbs( dst_norm, dst_norm_scaled );
/// Drawing a circle around corners
for( int j = 0; j < dst_norm.rows ; j++ )
{ for( int i = 0; i < dst_norm.cols; i++ )
{
if( (int) dst_norm.at<float>(j,i) > thresh )
{
circle( dst_norm_scaled, Point( i, j ), 5, Scalar(0), 2, 8, 0 );
}
}
}
/// Showing the result
namedWindow( corners_window, WINDOW_AUTOSIZE );
imshow( corners_window, dst_norm_scaled );
}