“图像处理”常用基本线代知识【备忘】
1.线性相关系数
两个变量的协方差除以他们的方差乘积的算术平方根等于这两个变量的线性相关系数
(1)相关系数的定义:
r(ξ1,ξ2)=cov(ξ1,ξ2)/[Dξ1Dξ2]^0.5
=E[(ξ1-Eξ1)(ξ2-Eξ2)] / [Dξ1Dξ2]^0.5 (Dξ1,Dξ2均大于零)
称:上式为ξ1,ξ2的‘相关系数’或‘标准协方差’。 以上可知方差、协方差、相关系数之间的相互关系
(2)还有另外一种定义形式:
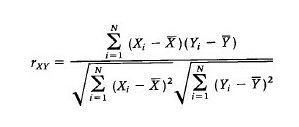
(3)相关系数的性质:
(1)相关系数可正可负;
(2)相关系数的区间是[-1,1],即∣ρxy∣≤1;
(3)具有对称性;即X与Y之间的相关系数(rXY)和Y与X之间的相关系数(rYX);
(4)相关系数与原点和尺度无关;
(5)如果X与Y统计上独立,则它们之间的相关系数为零;但是r=0不等于说两个变量是独立的。即零相关并不一定意味着独立性;
(6)相关系数是线性关联或线性相依的一个度量,它不能用于描述非线性关系;
(7)虽然相关系数是两个变量之间的线性关联的一个度量,却不一定有因果关系的含义;
2.协方差的定义:
COV(X,Y)=E(XY)-E(X)E(Y)=E[(X-E(X))(Y-E(Y))]。
3.相关矩阵(Correlation Matrix)
定义:
相关矩阵也叫相关系数矩阵,是由矩阵各列间的相关系数构成的。也就是说,相关矩阵第i行第j列的元素是 原矩阵第i列和第j行的相关系数。
性质:
相关矩阵的对角元素是1。
相关矩阵是对称矩阵。
4.自相关矩阵
定义:自相关矩阵就是,原矩阵是自己的相关矩阵。
5.酉矩阵
酉矩阵的充分必要条件是,它的n个列向量是两两正交的单位向量
酉空间 酉变换 对称变换
相关参考
6.海森矩阵
相关参考