Linux时间子系统
http://blog.csdn.net/droidphone/article/details/7975694
Linux时间子系统之一:clock source(时钟源)
clock source用于为linux内核提供一个时间基线,如果你用linux的date命令获取当前时间,内核会读取当前的clock source,转换并返回合适的时间单位给用户空间。在硬件层,它通常实现为一个由固定时钟频率驱动的计数器,计数器只能单调地增加,直到溢出为止。时钟源是内核计时的基础,系统启动时,内核通过硬件RTC获得当前时间,在这以后,在大多数情况下,内核通过选定的时钟源更新实时时间信息(墙上时间),而不再读取RTC的时间。本节的内核代码树基于V3.4.10。
/*****************************************************************************************************/
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!
/*****************************************************************************************************/
1. struct clocksource结构
内核用一个clocksource结构对真实的时钟源进行软件抽象,现在我们从clock source的数据结构开始,它的定义如下:
- struct clocksource {
- /*
- * Hotpath data, fits in a single cache line when the
- * clocksource itself is cacheline aligned.
- */
- cycle_t (*read)(struct clocksource *cs);
- cycle_t cycle_last;
- cycle_t mask;
- u32 mult;
- u32 shift;
- u64 max_idle_ns;
- u32 maxadj;
- #ifdef CONFIG_ARCH_CLOCKSOURCE_DATA
- struct arch_clocksource_data archdata;
- #endif
- const char *name;
- struct list_head list;
- int rating;
- int (*enable)(struct clocksource *cs);
- void (*disable)(struct clocksource *cs);
- unsigned long flags;
- void (*suspend)(struct clocksource *cs);
- void (*resume)(struct clocksource *cs);
- /* private: */
- #ifdef CONFIG_CLOCKSOURCE_WATCHDOG
- /* Watchdog related data, used by the framework */
- struct list_head wd_list;
- cycle_t cs_last;
- cycle_t wd_last;
- #endif
- } ____cacheline_aligned;
1.1 rating:时钟源的精度
- 1--99: 不适合于用作实际的时钟源,只用于启动过程或用于测试;
- 100--199:基本可用,可用作真实的时钟源,但不推荐;
- 200--299:精度较好,可用作真实的时钟源;
- 300--399:很好,精确的时钟源;
- 400--499:理想的时钟源,如有可能就必须选择它作为时钟源;
1.2 read回调函数
1.3 mult和shift字段
t = cycle/F;
t = (cycle * mult) >> shift;
F = (1 << shift) / mult;
- static inline s64 clocksource_cyc2ns(cycle_t cycles, u32 mult, u32 shift)
- {
- return ((u64) cycles * mult) >> shift;
- }
2. clocksource的注册和初始化
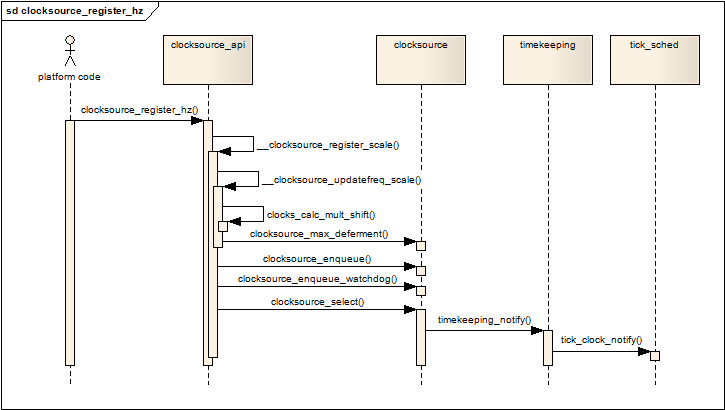
由上图可见,最终大部分工作会转由__clocksource_register_scale完成,该函数首先完成对mult和shift值的计算,然后根据mult和shift值,最终通过clocksource_max_deferment获得该clocksource可接受的最大IDLE时间,并记录在clocksource的max_idle_ns字段中。clocksource_enqueue函数负责按clocksource的rating的大小,把该clocksource按顺序挂在全局链表clocksource_list上,rating值越大,在链表上的位置越靠前。
3. clocksource watchdog
系统中可能同时会注册对个clocksource,各个clocksource的精度和稳定性各不相同,为了筛选这些注册的clocksource,内核启用了一个定时器用于监控这些clocksource的性能,定时器的周期设为0.5秒:
- #define WATCHDOG_INTERVAL (HZ >> 1)
- #define WATCHDOG_THRESHOLD (NSEC_PER_SEC >> 4)
当有新的clocksource被注册时,除了会挂在全局链表clocksource_list外,还会同时挂在一个watchdog链表上:watchdog_list。定时器周期性地(0.5秒)检查watchdog_list上的clocksource,WATCHDOG_THRESHOLD的值定义为0.0625秒,如果在0.5秒内,clocksource的偏差大于这个值就表示这个clocksource是不稳定的,定时器的回调函数通过clocksource_watchdog_kthread线程标记该clocksource,并把它的rate修改为0,表示精度极差。
4. 建立clocksource的简要过程
在系统的启动阶段,内核注册了一个基于jiffies的clocksource,代码位于kernel/time/jiffies.c:
- struct clocksource clocksource_jiffies = {
- .name = "jiffies",
- .rating = 1, /* lowest valid rating*/
- .read = jiffies_read,
- .mask = 0xffffffff, /*32bits*/
- .mult = NSEC_PER_JIFFY << JIFFIES_SHIFT, /* details above */
- .shift = JIFFIES_SHIFT,
- };
- ......
- static int __init init_jiffies_clocksource(void)
- {
- return clocksource_register(&clocksource_jiffies);
- }
- core_initcall(init_jiffies_clocksource);
- struct clocksource * __init __weak clocksource_default_clock(void)
- {
- return &clocksource_jiffies;
- }
- static int __init clocksource_done_booting(void)
- {
- ......
- curr_clocksource = clocksource_default_clock();
- ......
- finished_booting = 1;
- ......
- clocksource_select();
- ......
- return 0;
- }
- fs_initcall(clocksource_done_booting);
Linux时间子系统之二:表示时间的单位和结构
人们习惯用于表示时间的方法是:年、月、日、时、分、秒、毫秒、星期等等,但是在内核中,为了软件逻辑和代码的方便性,它使用了一些不同的时间表示方法,并为这些表示方法定义了相应的变量和数据结构,本节的内容就是阐述这些表示方法的意义和区别。
/*****************************************************************************************************/
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!/*****************************************************************************************************/
1. jiffies
内核用jiffies变量记录系统启动以来经过的时钟滴答数,它的声明如下:
- extern u64 __jiffy_data jiffies_64;
- extern unsigned long volatile __jiffy_data jiffies;
- time_after(a,b)
- time_before(a,b)
- time_after_eq(a,b)
- time_before_eq(a,b)
- time_in_range(a,b,c)
同时,内核还提供了一些辅助函数用于jiffies和毫秒以及纳秒之间的转换:
- unsigned int jiffies_to_msecs(const unsigned long j);
- unsigned int jiffies_to_usecs(const unsigned long j);
- unsigned long msecs_to_jiffies(const unsigned int m);
- unsigned long usecs_to_jiffies(const unsigned int u);
2. struct timeval
- struct timeval {
- __kernel_time_t tv_sec; /* seconds */
- __kernel_suseconds_t tv_usec; /* microseconds */
- };
3. struct timespec
- struct timespec {
- __kernel_time_t tv_sec; /* seconds */
- long tv_nsec; /* nanoseconds */
- };
- static inline int timespec_equal(const struct timespec *a, const struct timespec *b);
- static inline int timespec_compare(const struct timespec *lhs, const struct timespec *rhs);
- static inline int timeval_compare(const struct timeval *lhs, const struct timeval *rhs);
- extern unsigned long mktime(const unsigned int year, const unsigned int mon,
- const unsigned int day, const unsigned int hour,
- const unsigned int min, const unsigned int sec);
- extern void set_normalized_timespec(struct timespec *ts, time_t sec, s64 nsec);
- static inline struct timespec timespec_add(struct timespec lhs, struct timespec rhs);
- static inline struct timespec timespec_sub(struct timespec lhs, struct timespec rhs);
- static inline s64 timespec_to_ns(const struct timespec *ts);
- static inline s64 timeval_to_ns(const struct timeval *tv);
- extern struct timespec ns_to_timespec(const s64 nsec);
- extern struct timeval ns_to_timeval(const s64 nsec);
- static __always_inline void timespec_add_ns(struct timespec *a, u64 ns);
- unsigned long timespec_to_jiffies(const struct timespec *value);
- void jiffies_to_timespec(const unsigned long jiffies, struct timespec *value);
- unsigned long timeval_to_jiffies(const struct timeval *value);
- void jiffies_to_timeval(const unsigned long jiffies, struct timeval *value);
timekeeper中的xtime字段用timespec作为时间单位。
4. struct ktime
- union ktime {
- s64 tv64;
- #if BITS_PER_LONG != 64 && !defined(CONFIG_KTIME_SCALAR)
- struct {
- # ifdef __BIG_ENDIAN
- s32 sec, nsec;
- # else
- s32 nsec, sec;
- # endif
- } tv;
- #endif
- };
- ktime_t ktime_set(const long secs, const unsigned long nsecs);
- ktime_t ktime_sub(const ktime_t lhs, const ktime_t rhs);
- ktime_t ktime_add(const ktime_t add1, const ktime_t add2);
- ktime_t ktime_add_ns(const ktime_t kt, u64 nsec);
- ktime_t ktime_sub_ns(const ktime_t kt, u64 nsec);
- ktime_t timespec_to_ktime(const struct timespec ts);
- ktime_t timeval_to_ktime(const struct timeval tv);
- struct timespec ktime_to_timespec(const ktime_t kt);
- struct timeval ktime_to_timeval(const ktime_t kt);
- s64 ktime_to_ns(const ktime_t kt);
- int ktime_equal(const ktime_t cmp1, const ktime_t cmp2);
- s64 ktime_to_us(const ktime_t kt);
- s64 ktime_to_ms(const ktime_t kt);
- ktime_t ns_to_ktime(u64 ns);
Linux时间子系统之三:时间的维护者:timekeeper
本系列文章的前两节讨论了用于计时的时钟源:clocksource,以及内核内部时间的一些表示方法,但是对于真实的用户来说,我们感知的是真实世界的真实时间,也就是所谓的墙上时间,clocksource只能提供一个按给定频率不停递增的周期计数,如何把它和真实的墙上时间相关联?本节的内容正是要讨论这一点。1. 时间的种类
内核管理着多种时间,它们分别是:
- RTC时间
- wall time:墙上时间
- monotonic time
- raw monotonic time
- boot time:总启动时间
RTC时间 在PC中,RTC时间又叫CMOS时间,它通常由一个专门的计时硬件来实现,软件可以读取该硬件来获得年月日、时分秒等时间信息,而在嵌入式系统中,有使用专门的RTC芯片,也有直接把RTC集成到Soc芯片中,读取Soc中的某个寄存器即可获取当前时间信息。一般来说,RTC是一种可持续计时的,也就是说,不管系统是否上电,RTC中的时间信息都不会丢失,计时会一直持续进行,硬件上通常使用一个后备电池对RTC硬件进行单独的供电。因为RTC硬件的多样性,开发者需要为每种RTC时钟硬件提供相应的驱动程序,内核和用户空间通过驱动程序访问RTC硬件来获取或设置时间信息。
xtime xtime和RTC时间一样,都是人们日常所使用的墙上时间,只是RTC时间的精度通常比较低,大多数情况下只能达到毫秒级别的精度,如果是使用外部的RTC芯片,访问速度也比较慢,为此,内核维护了另外一个wall time时间:xtime,取决于用于对xtime计时的clocksource,它的精度甚至可以达到纳秒级别,因为xtime实际上是一个内存中的变量,它的访问速度非常快,内核大部分时间都是使用xtime来获得当前时间信息。xtime记录的是自1970年1月1日24时到当前时刻所经历的纳秒数。
monotonic time 该时间自系统开机后就一直单调地增加,它不像xtime可以因用户的调整时间而产生跳变,不过该时间不计算系统休眠的时间,也就是说,系统休眠时,monotoic时间不会递增。
raw monotonic time 该时间与monotonic时间类似,也是单调递增的时间,唯一的不同是:raw monotonic time“更纯净”,他不会受到NTP时间调整的影响,它代表着系统独立时钟硬件对时间的统计。
boot time 与monotonic时间相同,不过会累加上系统休眠的时间,它代表着系统上电后的总时间。
| 时间种类 | 精度(统计单位) | 访问速度 | 累计休眠时间 | 受NTP调整的影响 |
| RTC | 低 | 慢 | Yes | Yes |
| xtime | 高 | 快 | Yes | Yes |
| monotonic | 高 | 快 | No | Yes |
| raw monotonic | 高 | 快 | No | No |
| boot time | 高 | 快 | Yes | Yes |
2. struct timekeeper
内核用timekeeper结构来组织与时间相关的数据,它的定义如下:
- struct timekeeper {
- struct clocksource *clock; /* Current clocksource used for timekeeping. */
- u32 mult; /* NTP adjusted clock multiplier */
- int shift; /* The shift value of the current clocksource. */
- cycle_t cycle_interval; /* Number of clock cycles in one NTP interval. */
- u64 xtime_interval; /* Number of clock shifted nano seconds in one NTP interval. */
- s64 xtime_remainder; /* shifted nano seconds left over when rounding cycle_interval */
- u32 raw_interval; /* Raw nano seconds accumulated per NTP interval. */
- u64 xtime_nsec; /* Clock shifted nano seconds remainder not stored in xtime.tv_nsec. */
- /* Difference between accumulated time and NTP time in ntp
- * shifted nano seconds. */
- s64 ntp_error;
- /* Shift conversion between clock shifted nano seconds and
- * ntp shifted nano seconds. */
- int ntp_error_shift;
- struct timespec xtime; /* The current time */
- struct timespec wall_to_monotonic;
- struct timespec total_sleep_time; /* time spent in suspend */
- struct timespec raw_time; /* The raw monotonic time for the CLOCK_MONOTONIC_RAW posix clock. */
- ktime_t offs_real; /* Offset clock monotonic -> clock realtime */
- ktime_t offs_boot; /* Offset clock monotonic -> clock boottime */
- seqlock_t lock; /* Seqlock for all timekeeper values */
- };
内核除了用xtime表示墙上的真实时间外,还维护了另外一个时间:monotonic time,可以把它理解为自系统启动以来所经过的时间,该时间只能单调递增,可以理解为xtime虽然正常情况下也是递增的,但是毕竟用户可以主动向前或向后调整墙上时间,从而修改xtime值。但是monotonic时间不可以往后退,系统启动后只能不断递增。奇怪的是,内核并没有直接定义一个这样的变量来记录monotonic时间,而是定义了一个变量wall_to_monotonic,记录了墙上时间和monotonic时间之间的偏移量,当需要获得monotonic时间时,把xtime和wall_to_monotonic相加即可,因为默认启动时monotonic时间为0,所以实际上wall_to_monotonic的值是一个负数,它和xtime同一时间被初始化,请参考timekeeping_init函数。
计算monotonic时间要去除系统休眠期间花费的时间,内核用total_sleep_time记录休眠的时间,每次休眠醒来后重新累加该时间,并调整wall_to_monotonic的值,使其在系统休眠醒来后,monotonic时间不会发生跳变。因为wall_to_monotonic值被调整。所以如果想获取boot time,需要加入该变量的值:
- void get_monotonic_boottime(struct timespec *ts)
- {
- ......
- do {
- seq = read_seqbegin(&timekeeper.lock);
- *ts = timekeeper.xtime;
- tomono = timekeeper.wall_to_monotonic;
- <span style="color:#ff0000;">sleep = timekeeper.total_sleep_time;</span>
- nsecs = timekeeping_get_ns();
- } while (read_seqretry(&timekeeper.lock, seq));
- set_normalized_timespec(ts, ts->tv_sec + tomono.tv_sec + sleep.tv_sec,
- ts->tv_nsec + tomono.tv_nsec + sleep.tv_nsec + nsecs);
- }
clock字段则指向了目前timekeeper所使用的时钟源,xtime,monotonic time和raw time都是基于该时钟源进行计时操作,当有新的精度更高的时钟源被注册时,通过timekeeping_notify函数,change_clocksource函数将会被调用,timekeeper.clock字段将会被更新,指向新的clocksource。
早期的内核版本中,xtime、wall_to_monotonic、raw_time其实是定义为全局静态变量,到我目前的版本(V3.4.10),这几个变量被移入到了timekeeper结构中,现在只需维护一个timekeeper全局静态变量即可:
- static struct timekeeper timekeeper;
3. timekeeper的初始化
timekeeper的初始化由timekeeping_init完成,该函数在start_kernel的初始化序列中被调用,timekeeping_init首先从RTC中获取当前时间:
- void __init timekeeping_init(void)
- {
- struct clocksource *clock;
- unsigned long flags;
- struct timespec now, boot;
- read_persistent_clock(&now);
- read_boot_clock(&boot);
- seqlock_init(&timekeeper.lock);
- ntp_init();
- write_seqlock_irqsave(&timekeeper.lock, flags);
- clock = clocksource_default_clock();
- if (clock->enable)
- clock->enable(clock);
- timekeeper_setup_internals(clock);
- timekeeper.xtime.tv_sec = now.tv_sec;
- timekeeper.xtime.tv_nsec = now.tv_nsec;
- timekeeper.raw_time.tv_sec = 0;
- timekeeper.raw_time.tv_nsec = 0;
- if (boot.tv_sec == 0 && boot.tv_nsec == 0) {
- boot.tv_sec = timekeeper.xtime.tv_sec;
- boot.tv_nsec = timekeeper.xtime.tv_nsec;
- }
- set_normalized_timespec(&timekeeper.wall_to_monotonic,
- -boot.tv_sec, -boot.tv_nsec);
- update_rt_offset();
- timekeeper.total_sleep_time.tv_sec = 0;
- timekeeper.total_sleep_time.tv_nsec = 0;
- write_sequnlock_irqrestore(&timekeeper.lock, flags);
- }
- void __attribute__((weak)) read_persistent_clock(struct timespec *ts)
- {
- ts->tv_sec = 0;
- ts->tv_nsec = 0;
- }
- void __attribute__((weak)) read_boot_clock(struct timespec *ts)
- {
- ts->tv_sec = 0;
- ts->tv_nsec = 0;
- }
- static int __init rtc_hctosys(void)
- {
- ......
- err = rtc_read_time(rtc, &tm);
- ......
- rtc_tm_to_time(&tm, &tv.tv_sec);
- do_settimeofday(&tv);
- ......
- return err;
- }
- late_initcall(rtc_hctosys);
4. 时间的更新
xtime一旦初始化完成后,timekeeper就开始独立于RTC,利用自身关联的clocksource进行时间的更新操作,根据内核的配置项的不同,更新时间的操作发生的频度也不尽相同,如果没有配置NO_HZ选项,通常每个tick的定时中断周期,do_timer会被调用一次,相反,如果配置了NO_HZ选项,可能会在好几个tick后,do_timer才会被调用一次,当然传入的参数是本次更新离上一次更新时相隔了多少个tick周期,系统会保证在clocksource的max_idle_ns时间内调用do_timer,以防止clocksource的溢出:
@kernel/arch/arm/kernel/time.c
#ifndef CONFIG_GENERIC_CLOCKEVENTS
/*
* Kernel system timer support.
*/
void timer_tick(void)
{
profile_tick(CPU_PROFILING);
do_leds();
xtime_update(1);
#ifndef CONFIG_SMP
update_process_times(user_mode(get_irq_regs()));
#endif
}
#endif
5. 获取时间
timekeeper提供了一系列的接口用于获取各种时间信息。
- void getboottime(struct timespec *ts); 获取系统启动时刻的实时时间
- void get_monotonic_boottime(struct timespec *ts); 获取系统启动以来所经过的时间,包含休眠时间
- ktime_t ktime_get_boottime(void); 获取系统启动以来所经过的c时间,包含休眠时间,返回ktime类型
- ktime_t ktime_get(void); 获取系统启动以来所经过的c时间,不包含休眠时间,返回ktime类型
- void ktime_get_ts(struct timespec *ts) ; 获取系统启动以来所经过的c时间,不包含休眠时间,返回timespec结构
- unsigned long get_seconds(void); 返回xtime中的秒计数值
- struct timespec current_kernel_time(void); 返回内核最后一次更新的xtime时间,不累计最后一次更新至今clocksource的计数值
- void getnstimeofday(struct timespec *ts); 获取当前时间,返回timespec结构
- void do_gettimeofday(struct timeval *tv); 获取当前时间,返回timeval结构
Linux时间子系统之四:定时器的引擎:clock_event_device
早期的内核版本中,进程的调度基于一个称之为tick的时钟滴答,通常使用时钟中断来定时地产生tick信号,每次tick定时中断都会进行进程的统计和调度,并对tick进行计数,记录在一个jiffies变量中,定时器的设计也是基于jiffies。这时候的内核代码中,几乎所有关于时钟的操作都是在machine级的代码中实现,很多公共的代码要在每个平台上重复实现。随后,随着通用时钟框架的引入,内核需要支持高精度的定时器,为此,通用时间框架为定时器硬件定义了一个标准的接口:clock_event_device,machine级的代码只要按这个标准接口实现相应的硬件控制功能,剩下的与平台无关的特性则统一由通用时间框架层来实现。/*****************************************************************************************************/
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!/*****************************************************************************************************/
1. 时钟事件软件架构
本系列文章的第一节中,我们曾经讨论了时钟源设备:clocksource,现在又来一个时钟事件设备:clock_event_device,它们有何区别?看名字,好像都是给系统提供时钟的设备,实际上, clocksource不能被编程,没有产生事件的能力,它主要被用于timekeeper来实现对真实时间进行精确的统计,而clock_event_device则是可编程的,它可以工作在周期触发或单次触发模式,系统可以对它进行编程,以确定下一次事件触发的时间, clock_event_device主要用于实现普通定时器和高精度定时器,同时也用于产生tick事件,供给进程调度子系统使用。时钟事件设备与通用时间框架中的其他模块的关系如下图所示: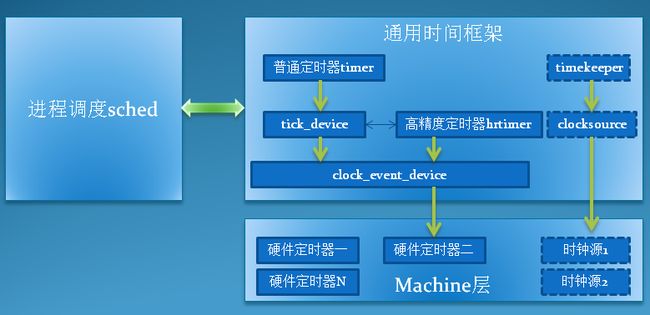
图1.1 clock_event_device软件架构
- 与clocksource一样,系统中可以存在多个clock_event_device,系统会根据它们的精度和能力,选择合适的clock_event_device对系统提供时钟事件服务。在smp系统中,为了减少处理器间的通信开销,基本上每个cpu都会具备一个属于自己的本地clock_event_device,独立地为该cpu提供时钟事件服务,smp中的每个cpu基于本地的clock_event_device,建立自己的tick_device,普通定时器和高精度定时器。
- 在软件架构上看,clock_event_device被分为了两层,与硬件相关的被放在了machine层,而与硬件无关的通用代码则被集中到了通用时间框架层,这符合内核对软件的设计需求,平台的开发者只需实现平台相关的接口即可,无需关注复杂的上层时间框架。
- tick_device是基于clock_event_device的进一步封装,用于代替原有的时钟滴答中断,给内核提供tick事件,以完成进程的调度和进程信息统计,负载平衡和时间更新等操作。
2. 时钟事件设备相关数据结构
2.1 struct clock_event_device
时钟事件设备的核心数据结构是clock_event_device结构,它代表着一个时钟硬件设备,该设备就好像是一个具有事件触发能力(通常就是指中断)的clocksource,它不停地计数,当计数值达到预先编程设定的数值那一刻,会引发一个时钟事件中断,继而触发该设备的事件处理回调函数,以完成对时钟事件的处理。clock_event_device结构的定义如下:
- struct clock_event_device {
- void (*event_handler)(struct clock_event_device *);
- int (*set_next_event)(unsigned long evt,
- struct clock_event_device *);
- int (*set_next_ktime)(ktime_t expires,
- struct clock_event_device *);
- ktime_t next_event;
- u64 max_delta_ns;
- u64 min_delta_ns;
- u32 mult;
- u32 shift;
- enum clock_event_mode mode;
- unsigned int features;
- unsigned long retries;
- void (*broadcast)(const struct cpumask *mask);
- void (*set_mode)(enum clock_event_mode mode,
- struct clock_event_device *);
- unsigned long min_delta_ticks;
- unsigned long max_delta_ticks;
- const char *name;
- int rating;
- int irq;
- const struct cpumask *cpumask;
- struct list_head list;
- } ____cacheline_aligned;
event_handler 该字段是一个回调函数指针,通常由通用框架层设置,在时间中断到来时,machine底层的的中断服务程序会调用该回调,框架层利用该回调实现对时钟事件的处理。
set_next_event 设置下一次时间触发的时间,使用类似于clocksource的cycle计数值(离现在的cycle差值)作为参数。
set_next_ktime 设置下一次时间触发的时间,直接使用ktime时间作为参数。
max_delta_ns 可设置的最大时间差,单位是纳秒。
min_delta_ns 可设置的最小时间差,单位是纳秒。
mult shift 与clocksource中的类似,只不过是用于把纳秒转换为cycle。
mode 该时钟事件设备的工作模式,两种主要的工作模式分别是:
- CLOCK_EVT_MODE_PERIODIC 周期触发模式,设置后按给定的周期不停地触发事件;
- CLOCK_EVT_MODE_ONESHOT 单次触发模式,只在设置好的触发时刻触发一次;
set_mode 函数指针,用于设置时钟事件设备的工作模式。
rating 表示该设备的精度等级。
list 系统中注册的时钟事件设备用该字段挂在全局链表变量clockevent_devices上。
2.2 全局变量clockevent_devices
- static LIST_HEAD(clockevent_devices);
2.3 全局变量clockevents_chain
- /* Notification for clock events */
- static RAW_NOTIFIER_HEAD(clockevents_chain);
3. clock_event_device的初始化和注册
- struct sys_timer {
- void (*init)(void);
- void (*suspend)(void);
- void (*resume)(void);
- #ifdef CONFIG_ARCH_USES_GETTIMEOFFSET
- unsigned long (*offset)(void);
- #endif
- };
- MACHINE_START(SMDK4412, "SMDK4412")
- /* Maintainer: Kukjin Kim <[email protected]> */
- /* Maintainer: Changhwan Youn <[email protected]> */
- .atag_offset = 0x100,
- .init_irq = exynos4_init_irq,
- .map_io = smdk4x12_map_io,
- .handle_irq = gic_handle_irq,
- .init_machine = smdk4x12_machine_init,
- .timer = &exynos4_timer,
- .restart = exynos4_restart,
- MACHINE_END
- static void __init exynos4_timer_init(void)
- {
- if (soc_is_exynos4210())
- mct_int_type = MCT_INT_SPI;
- else
- mct_int_type = MCT_INT_PPI;
- exynos4_timer_resources();
- exynos4_clocksource_init();
- exynos4_clockevent_init();
- }
- struct sys_timer exynos4_timer = {
- .init = exynos4_timer_init,
- };
- static struct clock_event_device mct_comp_device = {
- .name = "mct-comp",
- .features = CLOCK_EVT_FEAT_PERIODIC | CLOCK_EVT_FEAT_ONESHOT,
- .rating = 250,
- .set_next_event = exynos4_comp_set_next_event,
- .set_mode = exynos4_comp_set_mode,
- };
- ......
- static void exynos4_clockevent_init(void)
- {
- clockevents_calc_mult_shift(&mct_comp_device, clk_rate, 5);
- ......
- mct_comp_device.cpumask = cpumask_of(0);
- clockevents_register_device(&mct_comp_device);
- setup_irq(EXYNOS4_IRQ_MCT_G0, &mct_comp_event_irq);
- }
- /*
- * Timer (local or broadcast) support
- */
- static DEFINE_PER_CPU(struct clock_event_device, percpu_clockevent);
- static int __cpuinit exynos4_local_timer_setup(struct clock_event_device *evt)
- {
- ......
- evt->name = mevt->name;
- evt->cpumask = cpumask_of(cpu);
- evt->set_next_event = exynos4_tick_set_next_event;
- evt->set_mode = exynos4_tick_set_mode;
- evt->features = CLOCK_EVT_FEAT_PERIODIC | CLOCK_EVT_FEAT_ONESHOT;
- evt->rating = 450;
- clockevents_calc_mult_shift(evt, clk_rate / (TICK_BASE_CNT + 1), 5);
- ......
- clockevents_register_device(evt);
- ......
- enable_percpu_irq(EXYNOS_IRQ_MCT_LOCALTIMER, 0);
- ......
- return 0;
- }
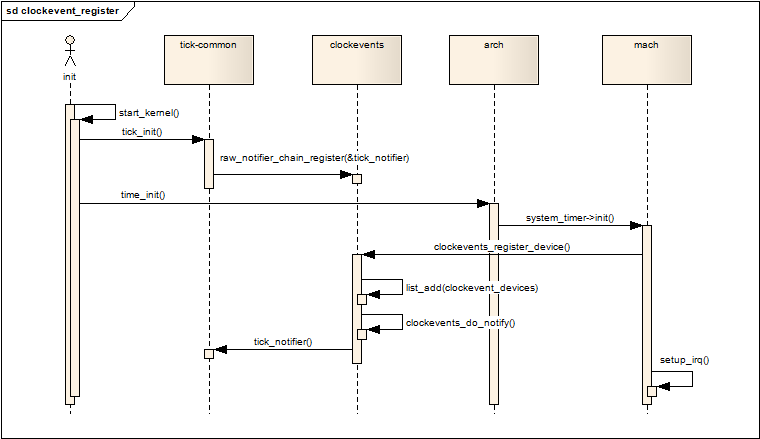
图3.1 clock_event_device的系统初始化
由上面的图示可以看出,框架层的初始化步骤很简单,又start_kernel开始,调用tick_init,它位于kernel/time/tick-common.c中,也只是简单地调用clockevents_register_notifier,同时把类型为notifier_block的tick_notifier作为参数传入,回看2.3节,clockevents_register_notifier注册了一个通知链,这样,当系统中的clock_event_device状态发生变化时(新增,删除,挂起,唤醒等等),tick_notifier中的notifier_call字段中设定的回调函数tick_notify就会被调用。接下来start_kernel调用了time_init函数,该函数通常定义在体系相关的代码中,正如前面所讨论的一样,它主要完成machine级别对时钟系统的初始化工作,最终通过clockevents_register_device注册系统中的时钟事件设备,把每个时钟时间设备挂在clockevent_device全局链表上,最后通过clockevent_do_notify触发框架层事先注册好的通知链,其实就是调用了tick_notify函数,我们主要关注CLOCK_EVT_NOTIFY_ADD通知,其它通知请自行参考代码,下面是tick_notify的简化版本:
- static int tick_notify(struct notifier_block *nb, unsigned long reason,
- void *dev)
- {
- switch (reason) {
- case CLOCK_EVT_NOTIFY_ADD:
- return tick_check_new_device(dev);
- case CLOCK_EVT_NOTIFY_BROADCAST_ON:
- case CLOCK_EVT_NOTIFY_BROADCAST_OFF:
- case CLOCK_EVT_NOTIFY_BROADCAST_FORCE:
- ......
- case CLOCK_EVT_NOTIFY_BROADCAST_ENTER:
- case CLOCK_EVT_NOTIFY_BROADCAST_EXIT:
- ......
- case CLOCK_EVT_NOTIFY_CPU_DYING:
- ......
- case CLOCK_EVT_NOTIFY_CPU_DEAD:
- ......
- case CLOCK_EVT_NOTIFY_SUSPEND:
- ......
- case CLOCK_EVT_NOTIFY_RESUME:
- ......
- }
- return NOTIFY_OK;
- }
4. tick_device
- struct tick_device {
- struct clock_event_device *evtdev;
- enum tick_device_mode mode;
- };
- /*
- * Tick devices
- */
- DEFINE_PER_CPU(struct tick_device, tick_cpu_device);
- static int tick_check_new_device(struct clock_event_device *newdev)
- {
- ......
- cpu = smp_processor_id();
- if (!cpumask_test_cpu(cpu, newdev->cpumask))
- goto out_bc;
- td = &per_cpu(tick_cpu_device, cpu);
- curdev = td->evtdev;
- if (!cpumask_equal(newdev->cpumask, cpumask_of(cpu))) {
- ......
- if (!irq_can_set_affinity(newdev->irq))
- goto out_bc;
- ......
- if (curdev && cpumask_equal(curdev->cpumask, cpumask_of(cpu)))
- goto out_bc;
- }
- if (curdev) {
- if ((curdev->features & CLOCK_EVT_FEAT_ONESHOT) &&
- !(newdev->features & CLOCK_EVT_FEAT_ONESHOT))
- goto out_bc; // 新的不支持单触发,但旧的支持,所以不能替换
- if (curdev->rating >= newdev->rating)
- goto out_bc; // 旧的比新的精度高,不能替换
- }
- if (tick_is_broadcast_device(curdev)) {
- clockevents_shutdown(curdev);
- curdev = NULL;
- }
- clockevents_exchange_device(curdev, newdev);
- tick_setup_device(td, newdev, cpu, cpumask_of(cpu));
5. tick事件的处理--最简单的情况
- CONFIG_NO_HZ == 0;
- CONFIG_HIGH_RES_TIMERS == 0;
- if (td->mode == TICKDEV_MODE_PERIODIC)
- tick_setup_periodic(newdev, 0);
- else
- tick_setup_oneshot(newdev, handler, next_event);
- void tick_handle_periodic(struct clock_event_device *dev)
- {
- int cpu = smp_processor_id();
- ktime_t next;
- tick_periodic(cpu);
- if (dev->mode != CLOCK_EVT_MODE_ONESHOT)
- return;
- next = ktime_add(dev->next_event, tick_period);
- for (;;) {
- if (!clockevents_program_event(dev, next, false))
- return;
- if (timekeeping_valid_for_hres())
- tick_periodic(cpu);
- next = ktime_add(next, tick_period);
- }
- }
- static void tick_periodic(int cpu)
- {
- if (tick_do_timer_cpu == cpu) {
- write_seqlock(&xtime_lock);
- /* Keep track of the next tick event */
- tick_next_period = ktime_add(tick_next_period, tick_period);
- do_timer(1);
- write_sequnlock(&xtime_lock);
- }
- update_process_times(user_mode(get_irq_regs()));
- profile_tick(CPU_PROFILING);
- }
- 更新jiffies_64变量;
- 更新墙上时钟;
- 每10个tick,更新一次cpu的负载信息;
- 更新进程的时间统计信息;
- 触发TIMER_SOFTIRQ软件中断,以便系统处理传统的低分辨率定时器;
- 检查rcu的callback;
- 通过scheduler_tick触发调度系统进行进程统计和调度工作;
Linux时间子系统之五:低分辨率定时器的原理和实现
利用定时器,我们可以设定在未来的某一时刻,触发一个特定的事件。 所谓低分辨率定时器,是指这种定时器的计时单位基于jiffies值的计数,也就是说,它的精度只有1/HZ,假如你的内核配置的HZ是1000,那意味着系统中的低分辨率定时器的精度就是1ms。早期的内核版本中,内核并不支持高精度定时器,理所当然只能使用这种低分辨率定时器,我们有时候把这种基于HZ的定时器机制成为时间轮:time wheel。虽然后来出现了高分辨率定时器,但它只是内核的一个可选配置项,所以直到目前最新的内核版本,这种低分辨率定时器依然被大量地使用着。/*****************************************************************************************************/
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!
/*****************************************************************************************************/
1. 定时器的使用方法
在讨论定时器的实现原理之前,我们先看看如何使用定时器。要在内核编程中使用定时器,首先我们要定义一个time_list结构,该结构在include/linux/timer.h中定义:
- struct timer_list {
- /*
- * All fields that change during normal runtime grouped to the
- * same cacheline
- */
- struct list_head entry;
- unsigned long expires;
- struct tvec_base *base;
- void (*function)(unsigned long);
- unsigned long data;
- int slack;
- ......
- };
expires 字段指出了该定时器的到期时刻,也就是期望定时器到期时刻的jiffies计数值。
base 每个cpu拥有一个自己的用于管理定时器的tvec_base结构,该字段指向该定时器所属的cpu所对应tvec_base结构。
function 字段是一个函数指针,定时器到期时,系统将会调用该回调函数,用于响应该定时器的到期事件。
data 该字段用于上述回调函数的参数。
slack 对有些对到期时间精度不太敏感的定时器,到期时刻允许适当地延迟一小段时间,该字段用于计算每次延迟的HZ数。
要定义一个timer_list,我们可以使用静态和动态两种办法,静态方法使用DEFINE_TIMER宏:
#define DEFINE_TIMER(_name, _function, _expires, _data)
该宏将得到一个名字为_name,并分别用_function,_expires,_data参数填充timer_list的相关字段。
如果要使用动态的方法,则可以自己声明一个timer_list结构,然后手动初始化它的各个字段:
- struct timer_list timer;
- ......
- init_timer(&timer);
- timer.function = _function;
- timer.expires = _expires;
- timer.data = _data;
- add_timer(&timer);
要修改定时器的到期时间,我们只要调用mod_timer即可:
- mod_timer(&timer, jiffies+50);
- del_timer(&timer);
- void add_timer_on(struct timer_list *timer, int cpu); // 在指定的cpu上添加定时器
- int mod_timer_pending(struct timer_list *timer, unsigned long expires); // 只有当timer已经处在激活状态时,才修改timer的到期时刻
- int mod_timer_pinned(struct timer_list *timer, unsigned long expires); // 当
- void set_timer_slack(struct timer_list *time, int slack_hz); // 设定timer允许的到期时刻的最大延迟,用于对精度不敏感的定时器
- int del_timer_sync(struct timer_list *timer); // 如果该timer正在被处理中,则等待timer处理完成才移除该timer
2. 定时器的软件架构
低分辨率定时器是基于HZ来实现的,也就是说,每个tick周期,都有可能有定时器到期,关于tick如何产生,请参考:Linux时间子系统之四:定时器的引擎:clock_event_device。系统中有可能有成百上千个定时器,难道在每个tick中断中遍历一下所有的定时器,检查它们是否到期?内核当然不会使用这么笨的办法,它使用了一个更聪明的办法:按定时器的到期时间对定时器进行分组。因为目前的多核处理器使用越来越广泛,连智能手机的处理器动不动就是4核心,内核对多核处理器有较好的支持,低分辨率定时器在实现时也充分地考虑了多核处理器的支持和优化。为了较好地利用cache line,也为了避免cpu之间的互锁,内核为多核处理器中的每个cpu单独分配了管理定时器的相关数据结构和资源,每个cpu独立地管理属于自己的定时器。
2.1 定时器的分组
首先,内核为每个cpu定义了一个tvec_base结构指针:
- static DEFINE_PER_CPU(struct tvec_base *, tvec_bases) = &boot_tvec_bases;
- struct tvec_base {
- spinlock_t lock;
- struct timer_list *running_timer;
- unsigned long timer_jiffies;
- unsigned long next_timer;
- struct tvec_root tv1;
- struct tvec tv2;
- struct tvec tv3;
- struct tvec tv4;
- struct tvec tv5;
- } ____cacheline_aligned;
timer_jiffies 该字段表示当前cpu定时器所经历过的jiffies数,大多数情况下,该值和jiffies计数值相等,当cpu的idle状态连续持续了多个jiffies时间时,当退出idle状态时,jiffies计数值就会大于该字段,在接下来的tick中断后,定时器系统会让该字段的值追赶上jiffies值。
next_timer 该字段指向该cpu下一个即将到期的定时器。
tv1--tv5 这5个字段用于对定时器进行分组,实际上,tv1--tv5都是一个链表数组,其中tv1的数组大小为TVR_SIZE, tv2 tv3 tv4 tv5的数组大小为TVN_SIZE,根据CONFIG_BASE_SMALL配置项的不同,它们有不同的大小:
- #define TVN_BITS (CONFIG_BASE_SMALL ? 4 : 6)
- #define TVR_BITS (CONFIG_BASE_SMALL ? 6 : 8)
- #define TVN_SIZE (1 << TVN_BITS)
- #define TVR_SIZE (1 << TVR_BITS)
- #define TVN_MASK (TVN_SIZE - 1)
- #define TVR_MASK (TVR_SIZE - 1)
- struct tvec {
- struct list_head vec[TVN_SIZE];
- };
- struct tvec_root {
- struct list_head vec[TVR_SIZE];
- };

图 2.1.1 定时器在系统中的组织结构
2.2 定时器的添加
要加入一个新的定时器,我们可以通过api函数add_timer或mod_timer来完成,最终的工作会交由internal_add_timer函数来处理。该函数按以下步骤进行处理:
- 计算定时器到期时间和所属cpu的tvec_base结构中的timer_jiffies字段的差值,记为idx;
- 根据idx的值,选择该定时器应该被放到tv1--tv5中的哪一个链表数组中,可以认为tv1-tv5分别占据一个32位数的不同比特位,tv1占据最低的8位,tv2占据紧接着的6位,然后tv3再占位,以此类推,最高的6位分配给tv5。最终的选择规则如下表所示:
| 链表数组 | idx范围 |
|---|---|
| tv1 | 0-255(2^8) |
| tv2 | 256--16383(2^14) |
| tv3 | 16384--1048575(2^20) |
| tv4 | 1048576--67108863(2^26) |
| tv5 | 67108864--4294967295(2^32) |
确定链表数组后,接着要确定把该定时器放入数组中的哪一个链表中,如果时间差idx小于256,按规则要放入tv1中,因为tv1包含了256个链表,所以可以简单地使用timer_list.expires的低8位作为数组的索引下标,把定时器链接到tv1中相应的链表中即可。如果时间差idx的值在256--18383之间,则需要把定时器放入tv2中,同样的,使用timer_list.expires的8--14位作为数组的索引下标,把定时器链接到tv2中相应的链表中,。定时器要加入tv3 tv4 tv5使用同样的原理。经过这样分组后的定时器,在后续的tick事件中,系统可以很方便地定位并取出相应的到期定时器进行处理。以上的讨论都体现在internal_add_timer的代码中:
- static void internal_add_timer(struct tvec_base *base, struct timer_list *timer)
- {
- unsigned long expires = timer->expires;
- unsigned long idx = expires - base->timer_jiffies;
- struct list_head *vec;
- if (idx < TVR_SIZE) {
- int i = expires & TVR_MASK;
- vec = base->tv1.vec + i;
- } else if (idx < 1 << (TVR_BITS + TVN_BITS)) {
- int i = (expires >> TVR_BITS) & TVN_MASK;
- vec = base->tv2.vec + i;
- } else if (idx < 1 << (TVR_BITS + 2 * TVN_BITS)) {
- int i = (expires >> (TVR_BITS + TVN_BITS)) & TVN_MASK;
- vec = base->tv3.vec + i;
- } else if (idx < 1 << (TVR_BITS + 3 * TVN_BITS)) {
- int i = (expires >> (TVR_BITS + 2 * TVN_BITS)) & TVN_MASK;
- vec = base->tv4.vec + i;
- } else if ((signed long) idx < 0) {
- ......
- } else {
- ......
- i = (expires >> (TVR_BITS + 3 * TVN_BITS)) & TVN_MASK;
- vec = base->tv5.vec + i;
- }
- list_add_tail(&timer->entry, vec);
- }
经过2.1节的处理后,系统中的定时器按到期时间有规律地放置在tv1--tv5各个链表数组中,其中tv1中放置着在接下来的256个jiffies即将到期的定时器列表,需要注意的是,并不是tv1.vec[0]中放置着马上到期的定时器列表,tv1.vec[1]中放置着将在jiffies+1到期的定时器列表。因为base.timer_jiffies的值一直在随着系统的运行而动态地增加,原则上是每个tick事件会加1,base.timer_jiffies代表者该cpu定时器系统当前时刻,定时器也是动态地加入头256个链表tv1中,按2.1节的讨论,定时器加入tv1中使用的下标索引是定时器到期时间expires的低8位,所以假设当前的base.timer_jiffies值是0x34567826,则马上到期的定时器是在tv1.vec[0x26]中,如果这时候系统加入一个在jiffies值0x34567828到期的定时器,他将会加入到tv1.vec[0x28]中,运行两个tick后,base.timer_jiffies的值会变为0x34567828,很显然,在每次tick事件中,定时器系统只要以base.timer_jiffies的低8位作为索引,取出tv1中相应的链表,里面正好包含了所有在该jiffies值到期的定时器列表。
那什么时候处理tv2--tv5中的定时器?每当base.timer_jiffies的低8位为0值时,这表明base.timer_jiffies的第8-13位有进位发生,这6位正好代表着tv2,这时只要按base.timer_jiffies的第8-13位的值作为下标,移出tv2中对应的定时器链表,然后用internal_add_timer把它们从新加入到定时器系统中来,因为这些定时器一定会在接下来的256个tick期间到期,所以它们肯定会被加入到tv1数组中,这样就完成了tv2往tv1迁移的过程。同样地,当base.timer_jiffies的第8-13位为0时,这表明base.timer_jiffies的第14-19位有进位发生,这6位正好代表着tv3,按base.timer_jiffies的第14-19位的值作为下标,移出tv3中对应的定时器链表,然后用internal_add_timer把它们从新加入到定时器系统中来,显然它们会被加入到tv2中,从而完成tv3到tv2的迁移,tv4,tv5的处理可以以此作类推。具体迁移的代码如下,参数index为事先计算好的高一级tv的需要迁移的数组索引:
- static int cascade(struct tvec_base *base, struct tvec *tv, int index)
- {
- /* cascade all the timers from tv up one level */
- struct timer_list *timer, *tmp;
- struct list_head tv_list;
- list_replace_init(tv->vec + index, &tv_list); // 移除需要迁移的链表
- /*
- * We are removing _all_ timers from the list, so we
- * don't have to detach them individually.
- */
- list_for_each_entry_safe(timer, tmp, &tv_list, entry) {
- BUG_ON(tbase_get_base(timer->base) != base);
- // 重新加入到定时器系统中,实际上将会迁移到下一级的tv数组中
- internal_add_timer(base, timer);
- }
- return index;
- }
- static inline void __run_timers(struct tvec_base *base)
- {
- struct timer_list *timer;
- spin_lock_irq(&base->lock);
- /* 同步jiffies,在NO_HZ情况下,base->timer_jiffies可能落后不止一个tick */
- while (time_after_eq(jiffies, base->timer_jiffies)) {
- struct list_head work_list;
- struct list_head *head = &work_list;
- /* 计算到期定时器链表在tv1中的索引 */
- int index = base->timer_jiffies & TVR_MASK;
- /*
- * /* tv2--tv5定时器列表迁移处理 */
- */
- if (!index &&
- (!cascade(base, &base->tv2, INDEX(0))) &&
- (!cascade(base, &base->tv3, INDEX(1))) &&
- !cascade(base, &base->tv4, INDEX(2)))
- cascade(base, &base->tv5, INDEX(3));
- /* 该cpu定时器系统运行时间递增一个tick */
- ++base->timer_jiffies;
- /* 取出到期的定时器链表 */
- list_replace_init(base->tv1.vec + index, &work_list);
- /* 遍历所有的到期定时器 */
- while (!list_empty(head)) {
- void (*fn)(unsigned long);
- unsigned long data;
- timer = list_first_entry(head, struct timer_list,entry);
- fn = timer->function;
- data = timer->data;
- timer_stats_account_timer(timer);
- base->running_timer = timer; /* 标记正在处理的定时器 */
- detach_timer(timer, 1);
- spin_unlock_irq(&base->lock);
- call_timer_fn(timer, fn, data); /* 调用定时器的回调函数 */
- spin_lock_irq(&base->lock);
- }
- }
- base->running_timer = NULL;
- spin_unlock_irq(&base->lock);
- }
3. 定时器软件中断
系统初始化时,start_kernel会调用定时器系统的初始化函数init_timers:
- void __init init_timers(void)
- {
- int err = timer_cpu_notify(&timers_nb, (unsigned long)CPU_UP_PREPARE,
- (void *)(long)smp_processor_id());
- init_timer_stats();
- BUG_ON(err != NOTIFY_OK);
- register_cpu_notifier(&timers_nb); /* 注册cpu notify,以便在hotplug时在cpu之间进行定时器的迁移 */
- open_softirq(TIMER_SOFTIRQ, run_timer_softirq);
- }
- void run_local_timers(void)
- {
- hrtimer_run_queues();
- raise_softirq(TIMER_SOFTIRQ);
- }
- static void run_timer_softirq(struct softirq_action *h)
- {
- struct tvec_base *base = __this_cpu_read(tvec_bases);
- hrtimer_run_pending();
- if (time_after_eq(jiffies, base->timer_jiffies))
- __run_timers(base);
- }
Linux时间子系统之六:高精度定时器(HRTIMER)的原理和实现
上一篇文章,我介绍了传统的 低分辨率定时器的实现原理。而随着内核的不断演进,大牛们已经对这种低分辨率定时器的精度不再满足,而且, 硬件也在不断地发展,系统中的定时器硬件的精度也越来越高,这也给高分辨率定时器的出现创造了条件。内核从2.6.16开始加入了高精度定时器架构。在实现方式上,内核的高分辨率定时器的实现代码几乎没有借用低分辨率定时器的数据结构和代码,内核文档给出的解释主要有以下几点:- 低分辨率定时器的代码和jiffies的关系太过紧密,并且默认按32位进行设计,并且它的代码已经经过长时间的优化,目前的使用也是没有任何错误,如果硬要基于它来实现高分辨率定时器,势必会打破原有的时间轮概念,并且会引入一大堆#if--#else判断;
- 虽然大部分时间里,时间轮可以实现O(1)时间复杂度,但是当有进位发生时,不可预测的O(N)定时器级联迁移时间,这对于低分辨率定时器来说问题不大,可是它大大地影响了定时器的精度;
- 低分辨率定时器几乎是为“超时”而设计的,并为此对它进行了大量的优化,对于这些以“超时”未目的而使用定时器,它们大多数期望在超时到来之前获得正确的结果,然后删除定时器,精确时间并不是它们主要的目的,例如网络通信、设备IO等等。
为此,内核为高精度定时器重新设计了一套软件架构,它可以为我们提供纳秒级的定时精度,以满足对精确时间有迫切需求的应用程序或内核驱动,例如多媒体应用,音频设备的驱动程序等等。以下的讨论用hrtimer(high resolution timer)表示高精度定时器。
/*****************************************************************************************************/
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!
/*****************************************************************************************************/
1. 如何组织hrtimer?
我们知道,低分辨率定时器使用5个链表数组来组织timer_list结构,形成了著名的时间轮概念,对于高分辨率定时器,我们期望组织它们的数据结构至少具备以下条件:
- 稳定而且快速的查找能力;
- 快速地插入和删除定时器的能力;
- 排序功能;
内核的开发者考察了多种数据结构,例如基数树、哈希表等等,最终他们选择了红黑树(rbtree)来组织hrtimer,红黑树已经以库的形式存在于内核中,并被成功地使用在内存管理子系统和文件系统中,随着系统的运行,hrtimer不停地被创建和销毁,新的hrtimer按顺序被插入到红黑树中,树的最左边的节点就是最快到期的定时器,内核用一个hrtimer结构来表示一个高精度定时器:
- struct hrtimer {
- struct timerqueue_node node;
- ktime_t _softexpires;
- enum hrtimer_restart (*function)(struct hrtimer *);
- struct hrtimer_clock_base *base;
- unsigned long state;
- ......
- };
- enum hrtimer_restart {
- HRTIMER_NORESTART, /* Timer is not restarted */
- HRTIMER_RESTART, /* Timer must be restarted */
- };
- #define HRTIMER_STATE_INACTIVE 0x00 // 定时器未激活
- #define HRTIMER_STATE_ENQUEUED 0x01 // 定时器已经被排入红黑树中
- #define HRTIMER_STATE_CALLBACK 0x02 // 定时器的回调函数正在被调用
- #define HRTIMER_STATE_MIGRATE 0x04 // 定时器正在CPU之间做迁移
- enum hrtimer_base_type {
- HRTIMER_BASE_MONOTONIC, // 单调递增的monotonic时间,不包含休眠时间
- HRTIMER_BASE_REALTIME, // 平常使用的墙上真实时间
- HRTIMER_BASE_BOOTTIME, // 单调递增的boottime,包含休眠时间
- HRTIMER_MAX_CLOCK_BASES, // 用于后续数组的定义
- };
- struct hrtimer_cpu_base {
- ......
- struct hrtimer_clock_base clock_base[HRTIMER_MAX_CLOCK_BASES];
- };
- struct hrtimer_clock_base {
- struct hrtimer_cpu_base *cpu_base; // 指向所属cpu的hrtimer_cpu_base结构
- ......
- struct timerqueue_head active; // 红黑树,包含了所有使用该时间基准系统的hrtimer
- ktime_t resolution; // 时间基准系统的分辨率
- ktime_t (*get_time)(void); // 获取该基准系统的时间函数
- ktime_t softirq_time;// 当用jiffies
- ktime_t offset; //
- };
- struct timerqueue_node {
- struct rb_node node; // 红黑树的节点
- ktime_t expires; // 该节点代表队hrtimer的到期时间,与hrtimer结构中的_softexpires稍有不同
- };
- struct timerqueue_head {
- struct rb_root head; // 红黑树的根节点
- struct timerqueue_node *next; // 该红黑树中最早到期的节点,也就是最左下的节点
- };
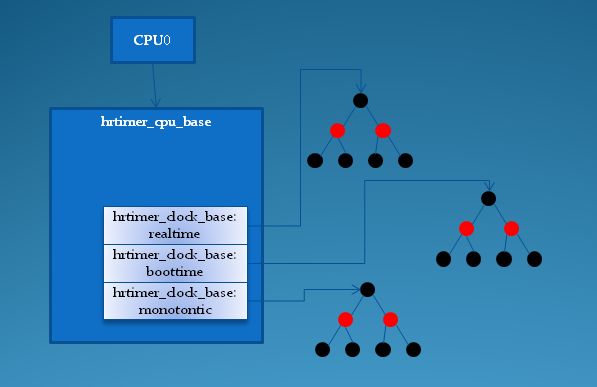
图 1.1 每个cpu的hrtimer组织结构
总结一下:
- 每个cpu有一个hrtimer_cpu_base结构;
- hrtimer_cpu_base结构管理着3种不同的时间基准系统的hrtimer,分别是:实时时间,启动时间和单调时间;
- 每种时间基准系统通过它的active字段(timerqueue_head结构指针),指向它们各自的红黑树;
- 红黑树上,按到期时间进行排序,最先到期的hrtimer位于最左下的节点,并被记录在active.next字段中;
- 3中时间基准的最先到期时间可能不同,所以,它们之中最先到期的时间被记录在hrtimer_cpu_base的expires_next字段中。
2. hrtimer如何运转
hrtimer的实现需要一定的硬件基础,它的实现依赖于我们前几章介绍的timekeeper和clock_event_device,如果你对timekeeper和clock_event_device不了解请参考以下文章:Linux时间子系统之三:时间的维护者:timekeeper,Linux时间子系统之四:定时器的引擎:clock_event_device。hrtimer系统需要通过timekeeper获取当前的时间,计算与到期时间的差值,并根据该差值,设定该cpu的tick_device(clock_event_device)的下一次的到期时间,时间一到,在clock_event_device的事件回调函数中处理到期的hrtimer。现在你或许有疑问:前面在介绍clock_event_device时,我们知道,每个cpu有自己的tick_device,通常用于周期性地产生进程调度和时间统计的tick事件,这里又说要用tick_device调度hrtimer系统,通常cpu只有一个tick_device,那他们如何协调工作?这个问题也一度困扰着我,如果再加上NO_HZ配置带来tickless特性,你可能会更晕。这里我们先把这个疑问放下,我将在后面的章节中来讨论这个问题,现在我们只要先知道,一旦开启了hrtimer,tick_device所关联的clock_event_device的事件回调函数会被修改为:hrtimer_interrupt,并且会被设置成工作于CLOCK_EVT_MODE_ONESHOT单触发模式。
2.1 添加一个hrtimer
要添加一个hrtimer,系统提供了一些api供我们使用,首先我们需要定义一个hrtimer结构的实例,然后用hrtimer_init函数对它进行初始化,它的原型如下:
- void hrtimer_init(struct hrtimer *timer, clockid_t which_clock,
- enum hrtimer_mode mode);
- timer.function = hr_callback;
如果定时器无需指定一个到期范围,可以在设定回调函数后直接使用hrtimer_start激活该定时器:
- int hrtimer_start(struct hrtimer *timer, ktime_t tim,
- const enum hrtimer_mode mode);
- hrtimer_start_range_ns(struct hrtimer *timer, ktime_t tim,
- unsigned long range_ns, const enum hrtimer_mode mode);
- int hrtimer_cancel(struct hrtimer *timer);
- extern u64
- hrtimer_forward(struct hrtimer *timer, ktime_t now, ktime_t interval);
- /* Forward a hrtimer so it expires after the hrtimer's current now */
- static inline u64 hrtimer_forward_now(struct hrtimer *timer,
- ktime_t interval)
- {
- return hrtimer_forward(timer, timer->base->get_time(), interval);
- }
- static inline int hrtimer_active(const struct hrtimer *timer)
- {
- return timer->state != HRTIMER_STATE_INACTIVE;
- }
- static inline int hrtimer_is_queued(struct hrtimer *timer)
- {
- return timer->state & HRTIMER_STATE_ENQUEUED;
- }
- static inline int hrtimer_callback_running(struct hrtimer *timer)
- {
- return timer->state & HRTIMER_STATE_CALLBACK;
- }
- static void __hrtimer_init(struct hrtimer *timer, clockid_t clock_id,
- enum hrtimer_mode mode)
- {
- struct hrtimer_cpu_base *cpu_base;
- int base;
- memset(timer, 0, sizeof(struct hrtimer));
- cpu_base = &__raw_get_cpu_var(hrtimer_bases);
- if (clock_id == CLOCK_REALTIME && mode != HRTIMER_MODE_ABS)
- clock_id = CLOCK_MONOTONIC;
- base = hrtimer_clockid_to_base(clock_id);
- timer->base = &cpu_base->clock_base[base];
- timerqueue_init(&timer->node);
- ......
- }
hrtimer_start和hrtimer_start_range_ns最终会把实际的工作交由__hrtimer_start_range_ns来完成:
- int __hrtimer_start_range_ns(struct hrtimer *timer, ktime_t tim,
- unsigned long delta_ns, const enum hrtimer_mode mode,
- int wakeup)
- {
- ......
- /* 取得hrtimer_clock_base指针 */
- base = lock_hrtimer_base(timer, &flags);
- /* 如果已经在红黑树中,先移除它: */
- ret = remove_hrtimer(timer, base); ......
- /* 如果是相对时间,则需要加上当前时间,因为内部是使用绝对时间 */
- if (mode & HRTIMER_MODE_REL) {
- tim = ktime_add_safe(tim, new_base->get_time());
- ......
- }
- /* 设置到期的时间范围 */
- hrtimer_set_expires_range_ns(timer, tim, delta_ns);
- ......
- /* 把hrtime按到期时间排序,加入到对应时间基准系统的红黑树中 */
- /* 如果该定时器的是最早到期的,将会返回true */
- leftmost = enqueue_hrtimer(timer, new_base);
- /*
- * Only allow reprogramming if the new base is on this CPU.
- * (it might still be on another CPU if the timer was pending)
- *
- * XXX send_remote_softirq() ?
- * 定时器比之前的到期时间要早,所以需要重新对tick_device进行编程,重新设定的的到期时间
- */
- if (leftmost && new_base->cpu_base == &__get_cpu_var(hrtimer_bases))
- hrtimer_enqueue_reprogram(timer, new_base, wakeup);
- unlock_hrtimer_base(timer, &flags);
- return ret;
- }
- <p>
- </p>
2.2 hrtimer的到期处理
高精度定时器系统有3个入口可以对到期定时器进行处理,它们分别是:
- 没有切换到高精度模式时,在每个jiffie的tick事件中断中进行查询和处理;
- 在HRTIMER_SOFTIRQ软中断中进行查询和处理;
- 切换到高精度模式后,在每个clock_event_device的到期事件中断中进行查询和处理;
低精度模式 因为系统并不是一开始就会支持高精度模式,而是在系统启动后的某个阶段,等待所有的条件都满足后,才会切换到高精度模式,当系统还没有切换到高精度模式时,所有的高精度定时器运行在低精度模式下,在每个jiffie的tick事件中断中进行到期定时器的查询和处理,显然这时候的精度和低分辨率定时器是一样的(HZ级别)。低精度模式下,每个tick事件中断中,hrtimer_run_queues函数会被调用,由它完成定时器的到期处理。hrtimer_run_queues首先判断目前高精度模式是否已经启用,如果已经切换到了高精度模式,什么也不做,直接返回:
- void hrtimer_run_queues(void)
- {
- if (hrtimer_hres_active())
- return;
- for (index = 0; index < HRTIMER_MAX_CLOCK_BASES; index++) {
- base = &cpu_base->clock_base[index];
- if (!timerqueue_getnext(&base->active))
- continue;
- if (gettime) {
- hrtimer_get_softirq_time(cpu_base);
- gettime = 0;
- }
- raw_spin_lock(&cpu_base->lock);
- while ((node = timerqueue_getnext(&base->active))) {
- struct hrtimer *timer;
- timer = container_of(node, struct hrtimer, node);
- if (base->softirq_time.tv64 <=
- hrtimer_get_expires_tv64(timer))
- break;
- __run_hrtimer(timer, &base->softirq_time);
- }
- raw_spin_unlock(&cpu_base->lock);
- }
高精度模式 切换到高精度模式后,原来给cpu提供tick事件的tick_device(clock_event_device)会被高精度定时器系统接管,它的中断事件回调函数被设置为hrtimer_interrupt,红黑树中最左下的节点的定时器的到期时间被编程到该clock_event_device中,这样每次clock_event_device的中断意味着至少有一个高精度定时器到期。另外,当timekeeper系统中的时间需要修正,或者clock_event_device的到期事件时间被重新编程时,系统会发出HRTIMER_SOFTIRQ软中断,软中断的处理函数run_hrtimer_softirq最终也会调用hrtimer_interrupt函数对到期定时器进行处理,所以在这里我们只要讨论hrtimer_interrupt函数的实现即可。
hrtimer_interrupt函数的前半部分和低精度模式下的hrtimer_run_queues函数完成相同的事情:它用一个for循环遍历各个时间基准系统,查询每个hrtimer_clock_base对应红黑树的左下节点,判断它的时间是否到期,如果到期,通过__run_hrtimer函数,对到期定时器进行处理,所以我们只讨论后半部分,在处理完所有到期定时器后,下一个到期定时器的到期时间保存在变量expires_next中,接下来的工作就是把这个到期时间编程到tick_device中:
- void hrtimer_interrupt(struct clock_event_device *dev)
- {
- ......
- for (i = 0; i < HRTIMER_MAX_CLOCK_BASES; i++) {
- ......
- while ((node = timerqueue_getnext(&base->active))) {
- ......
- if (basenow.tv64 < hrtimer_get_softexpires_tv64(timer)) {
- ktime_t expires;
- expires = ktime_sub(hrtimer_get_expires(timer),
- base->offset);
- if (expires.tv64 < expires_next.tv64)
- expires_next = expires;
- break;
- }
- __run_hrtimer(timer, &basenow);
- }
- }
- /*
- * Store the new expiry value so the migration code can verify
- * against it.
- */
- cpu_base->expires_next = expires_next;
- raw_spin_unlock(&cpu_base->lock);
- /* Reprogramming necessary ? */
- if (expires_next.tv64 == KTIME_MAX ||
- !tick_program_event(expires_next, 0)) {
- cpu_base->hang_detected = 0;
- return;
- }
- 系统正在被调试跟踪,导致时间在走,程序不走;
- 定时器的回调函数花了太长的时间;
- 系统运行在虚拟机中,而虚拟机被调度导致停止运行;
- raw_spin_lock(&cpu_base->lock);
- now = hrtimer_update_base(cpu_base);
- cpu_base->nr_retries++;
- if (++retries < 3)
- goto retry;
- delta = ktime_sub(now, entry_time);
- if (delta.tv64 > cpu_base->max_hang_time.tv64)
- cpu_base->max_hang_time = delta;
- /*
- * Limit it to a sensible value as we enforce a longer
- * delay. Give the CPU at least 100ms to catch up.
- */
- if (delta.tv64 > 100 * NSEC_PER_MSEC)
- expires_next = ktime_add_ns(now, 100 * NSEC_PER_MSEC);
- else
- expires_next = ktime_add(now, delta);
- tick_program_event(expires_next, 1);
- printk_once(KERN_WARNING "hrtimer: interrupt took %llu ns\n",
- ktime_to_ns(delta));
- }
3. 切换到高精度模式
上面提到,尽管内核配置成支持高精度定时器,但并不是一开始就工作于高精度模式,系统在启动的开始阶段,还是按照传统的模式在运行:tick_device按HZ频率定期地产生tick事件,这时的hrtimer工作在低分辨率模式,到期事件在每个tick事件中断中由hrtimer_run_queues函数处理,同时,在低分辨率定时器(时间轮)的软件中断TIMER_SOFTIRQ中,hrtimer_run_pending会被调用,系统在这个函数中判断系统的条件是否满足切换到高精度模式,如果条件满足,则会切换至高分辨率模式,另外提一下,NO_HZ模式也是在该函数中判断并切换。
- void hrtimer_run_pending(void)
- {
- if (hrtimer_hres_active())
- return;
- ......
- if (tick_check_oneshot_change(!hrtimer_is_hres_enabled()))
- hrtimer_switch_to_hres();
- }
- DEFINE_PER_CPU(struct hrtimer_cpu_base, hrtimer_bases) = {
- ......
- }
- static inline int hrtimer_hres_active(void)
- {
- return __this_cpu_read(hrtimer_bases.hres_active);
- }
- int tick_check_oneshot_change(int allow_nohz)
- {
- struct tick_sched *ts = &__get_cpu_var(tick_cpu_sched);
- if (!test_and_clear_bit(0, &ts->check_clocks))
- return 0;
- if (ts->nohz_mode != NOHZ_MODE_INACTIVE)
- return 0;
- if (!timekeeping_valid_for_hres() || !tick_is_oneshot_available())
- return 0;
- if (!allow_nohz)
- return 1;
- tick_nohz_switch_to_nohz();
- return 0;
- }
如果tick_sched结构中的nohz_mode字段不是NOHZ_MODE_INACTIVE,表明系统已经切换到其它模式,直接返回。nohz_mode的取值有3种:
- NOHZ_MODE_INACTIVE // 未启用NO_HZ模式
- NOHZ_MODE_LOWRES // 启用NO_HZ模式,hrtimer工作于低精度模式下
- NOHZ_MODE_HIGHRES // 启用NO_HZ模式,hrtimer工作于高精度模式下
(!hrtimer_is_hres_enabled())
所以当系统不允许高精度模式时,将会在tick_check_oneshot_change函数内,通过tick_nohz_switch_to_nohz切换至NOHZ_MODE_LOWRES 模式,如果系统允许高精度模式,传入的allow_nohz参数为false,tick_check_oneshot_change函数返回1,回到上面的hrtimer_run_pending函数,hrtimer_switch_to_hres函数将会被调用,已完成切换到NOHZ_MODE_HIGHRES高精度模式。好啦,真正的切换函数找到了,我们看一看它如何切换:
首先,它通过hrtimer_cpu_base中的hres_active字段判断该cpu是否已经切换至高精度模式,如果是则直接返回:
- static int hrtimer_switch_to_hres(void)
- {
- int i, cpu = smp_processor_id();
- struct hrtimer_cpu_base *base = &per_cpu(hrtimer_bases, cpu);
- unsigned long flags;
- if (base->hres_active)
- return 1;
- local_irq_save(flags);
- if (tick_init_highres()) {
- local_irq_restore(flags);
- printk(KERN_WARNING "Could not switch to high resolution "
- "mode on CPU %d\n", cpu);
- return 0;
- }
接着,设置hres_active标志,以表明高精度模式已经切换,然后把3个时间基准系统的resolution字段设为KTIME_HIGH_RES:
- base->hres_active = 1;
- for (i = 0; i < HRTIMER_MAX_CLOCK_BASES; i++)
- base->clock_base[i].resolution = KTIME_HIGH_RES;
- tick_setup_sched_timer();
- /* "Retrigger" the interrupt to get things going */
- retrigger_next_event(NULL);
- local_irq_restore(flags);
- return 1;
整个切换过程可以用下图表示:
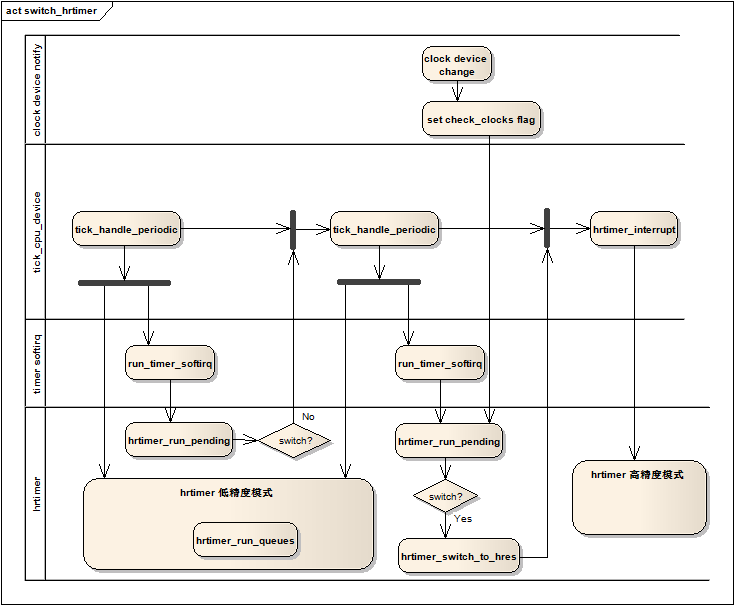
图3.1 低精度模式切换至高精度模式
4. 模拟tick事件
根据上一节的讨论,当系统切换到高精度模式后,tick_device被高精度定时器系统接管,不再定期地产生tick事件,我们知道,到目前的版本为止(V3.4),内核还没有彻底废除jiffies机制,系统还是依赖定期到来的tick事件,供进程调度系统和时间更新等操作,大量存在的低精度定时器也仍然依赖于jiffies的计数,所以,尽管tick_device被接管,高精度定时器系统还是要想办法继续提供定期的tick事件。为了达到这一目的,内核使用了一个取巧的办法:既然高精度模式已经启用,可以定义一个hrtimer,把它的到期时间设定为一个jiffy的时间,当这个hrtimer到期时,在这个hrtimer的到期回调函数中,进行和原来的tick_device同样的操作,然后把该hrtimer的到期时间顺延一个jiffy周期,如此反复循环,完美地模拟了原有tick_device的功能。下面我们看看具体点代码是如何实现的。
在kernel/time/tick-sched.c中,内核定义了一个per_cpu全局变量:tick_cpu_sched,从而为每个cpu提供了一个tick_sched结构, 该结构主要用于管理NO_HZ配置下的tickless处理,因为模拟tick事件与tickless有很强的相关性,所以高精度定时器系统也利用了该结构的以下字段,用于完成模拟tick事件的操作:
- struct tick_sched {
- struct hrtimer sched_timer;
- unsigned long check_clocks;
- enum tick_nohz_mode nohz_mode;
- ......
- };
上一节提到,用于切换至高精度模式的函数是hrtimer_switch_to_hres,在它的最后,调用了函数tick_setup_sched_timer,该函数的作用就是设置一个用于模拟tick事件的hrtimer:
- void tick_setup_sched_timer(void)
- {
- struct tick_sched *ts = &__get_cpu_var(tick_cpu_sched);
- ktime_t now = ktime_get();
- /*
- * Emulate tick processing via per-CPU hrtimers:
- */
- hrtimer_init(&ts->sched_timer, CLOCK_MONOTONIC, HRTIMER_MODE_ABS);
- ts->sched_timer.function = tick_sched_timer;
- /* Get the next period (per cpu) */
- hrtimer_set_expires(&ts->sched_timer, tick_init_jiffy_update());
- for (;;) {
- hrtimer_forward(&ts->sched_timer, now, tick_period);
- hrtimer_start_expires(&ts->sched_timer,
- HRTIMER_MODE_ABS_PINNED);
- /* Check, if the timer was already in the past */
- if (hrtimer_active(&ts->sched_timer))
- break;
- now = ktime_get();
- }
- #ifdef CONFIG_NO_HZ
- if (tick_nohz_enabled)
- ts->nohz_mode = NOHZ_MODE_HIGHRES;
- #endif
- }
接着我们关注一下hrtimer的回调函数tick_sched_timer,我们知道,系统中的jiffies计数,时间更新等是全局操作,在smp系统中,只有一个cpu负责该工作,所以在tick_sched_timer的一开始,先判断当前cpu是否负责更新jiffies和时间,如果是,则执行更新操作:
- static enum hrtimer_restart tick_sched_timer(struct hrtimer *timer)
- {
- ......
- #ifdef CONFIG_NO_HZ
- if (unlikely(tick_do_timer_cpu == TICK_DO_TIMER_NONE))
- tick_do_timer_cpu = cpu;
- #endif
- /* Check, if the jiffies need an update */
- if (tick_do_timer_cpu == cpu)
- tick_do_update_jiffies64(now);
- if (regs) {
- ......
- update_process_times(user_mode(regs));
- ......
- }
- hrtimer_forward(timer, now, tick_period);
- return HRTIMER_RESTART;
- }
Linux时间子系统之七:定时器的应用--msleep(),hrtimer_nanosleep()
我们已经在前面几章介绍了低分辨率定时器和高精度定时器的实现原理,内核为了方便其它子系统,在时间子系统中提供了一些用于延时或调度的API,例如msleep,hrtimer_nanosleep等等,这些API基于低分辨率定时器或高精度定时器来实现,本章的内容就是讨论这些方便、好用的API是如何利用定时器系统来完成所需的功能的。
/*****************************************************************************************************/
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!
/*****************************************************************************************************/
1. msleep
msleep相信大家都用过,它可能是内核用使用最广泛的延时函数之一,它会使当前进程被调度并让出cpu一段时间,因为这一特性,它不能用于中断上下文,只能用于进程上下文中。要想在中断上下文中使用延时函数,请使用会阻塞cpu的无调度版本mdelay。msleep的函数原型如下:
- void msleep(unsigned int msecs)
- unsigned long msleep_interruptible(unsigned int msecs)
| 函数 | 延时单位 | 返回值 | 是否可被信号中断 |
|---|---|---|---|
| msleep | 毫秒 | 无 | 否 |
| msleep_interruptible | 毫秒 | 未完成的毫秒数 | 是 |
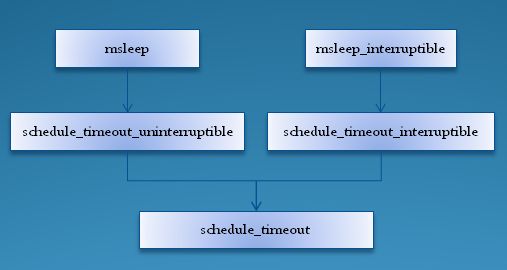
图1.1 两个延时函数的调用序列
下面我们看看schedule_timeout函数的实现,函数首先处理两种特殊情况,一种是传入的延时jiffies数是个负数,则打印一句警告信息,然后马上返回,另一种是延时jiffies数是MAX_SCHEDULE_TIMEOUT,表明需要一直延时,直接执行调度即可:
- signed long __sched schedule_timeout(signed long timeout)
- {
- struct timer_list timer;
- unsigned long expire;
- switch (timeout)
- {
- case MAX_SCHEDULE_TIMEOUT:
- schedule();
- goto out;
- default:
- if (timeout < 0) {
- printk(KERN_ERR "schedule_timeout: wrong timeout "
- "value %lx\n", timeout);
- dump_stack();
- current->state = TASK_RUNNING;
- goto out;
- }
- }
- expire = timeout + jiffies;
- setup_timer_on_stack(&timer, process_timeout, (unsigned long)current);
- __mod_timer(&timer, expire, false, TIMER_NOT_PINNED);
- schedule();
- static void process_timeout(unsigned long __data)
- {
- wake_up_process((struct task_struct *)__data);
- }
- del_singleshot_timer_sync(&timer);
- /* Remove the timer from the object tracker */
- destroy_timer_on_stack(&timer);
- timeout = expire - jiffies;
- out:
- return timeout < 0 ? 0 : timeout;
- }
说完了关键的schedule_timeout函数,我们看看msleep如何实现:
- signed long __sched schedule_timeout_uninterruptible(signed long timeout)
- {
- __set_current_state(TASK_UNINTERRUPTIBLE);
- return schedule_timeout(timeout);
- }
- void msleep(unsigned int msecs)
- {
- unsigned long timeout = msecs_to_jiffies(msecs) + 1;
- while (timeout)
- timeout = schedule_timeout_uninterruptible(timeout);
- }
看看msleep_interruptible的实现:
- signed long __sched schedule_timeout_interruptible(signed long timeout)
- {
- __set_current_state(TASK_INTERRUPTIBLE);
- return schedule_timeout(timeout);
- }
- unsigned long msleep_interruptible(unsigned int msecs)
- {
- unsigned long timeout = msecs_to_jiffies(msecs) + 1;
- while (timeout && !signal_pending(current))
- timeout = schedule_timeout_interruptible(timeout);
- return jiffies_to_msecs(timeout);
- }
- signed long __sched schedule_timeout_killable(signed long timeout)
- {
- __set_current_state(TASK_KILLABLE);
- return schedule_timeout(timeout);
- }
2. hrtimer_nanosleep
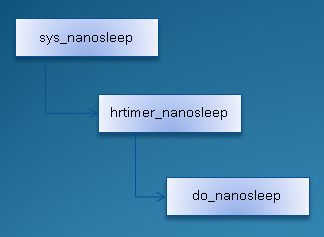
- long hrtimer_nanosleep(struct timespec *rqtp, struct timespec __user *rmtp,
- const enum hrtimer_mode mode, const clockid_t clockid)
- {
- struct restart_block *restart;
- struct hrtimer_sleeper t;
- int ret = 0;
- unsigned long slack;
- slack = current->timer_slack_ns;
- if (rt_task(current))
- slack = 0;
- hrtimer_init_on_stack(&t.timer, clockid, mode);
- hrtimer_set_expires_range_ns(&t.timer, timespec_to_ktime(*rqtp), slack);
- if (do_nanosleep(&t, mode))
- goto out;
- /* Absolute timers do not update the rmtp value and restart: */
- if (mode == HRTIMER_MODE_ABS) {
- ret = -ERESTARTNOHAND;
- goto out;
- }
- if (rmtp) {
- ret = update_rmtp(&t.timer, rmtp);
- if (ret <= 0)
- goto out;
- }
- restart = ¤t_thread_info()->restart_block;
- restart->fn = hrtimer_nanosleep_restart;
- restart->nanosleep.clockid = t.timer.base->clockid;
- restart->nanosleep.rmtp = rmtp;
- restart->nanosleep.expires = hrtimer_get_expires_tv64(&t.timer);
- ret = -ERESTART_RESTARTBLOCK;
- out:
- destroy_hrtimer_on_stack(&t.timer);
- return ret;
- }
- void hrtimer_init_sleeper(struct hrtimer_sleeper *sl, struct task_struct *task)
- {
- sl->timer.function = hrtimer_wakeup;
- sl->task = task;
- }
- EXPORT_SYMBOL_GPL(hrtimer_init_sleeper);
- static int __sched do_nanosleep(struct hrtimer_sleeper *t, enum hrtimer_mode mode)
- {
- hrtimer_init_sleeper(t, current);
- do {
- set_current_state(TASK_INTERRUPTIBLE);
- hrtimer_start_expires(&t->timer, mode);
- if (!hrtimer_active(&t->timer))
- t->task = NULL;
- if (likely(t->task))
- schedule();
- hrtimer_cancel(&t->timer);
- mode = HRTIMER_MODE_ABS;
- } while (t->task && !signal_pending(current));
- __set_current_state(TASK_RUNNING);
- return t->task == NULL;
- }
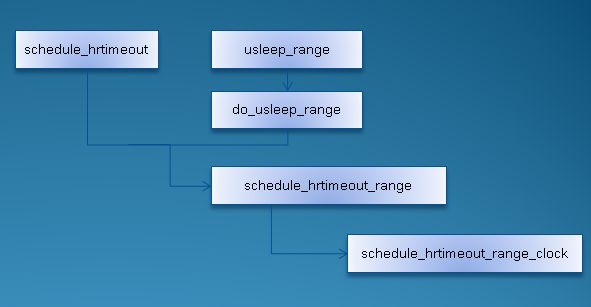
- schedule_hrtimeout 使得当前进程休眠指定的时间,使用CLOCK_MONOTONIC计时系统;
- schedule_hrtimeout_range 使得当前进程休眠指定的时间范围,使用CLOCK_MONOTONIC计时系统;
- schedule_hrtimeout_range_clock 使得当前进程休眠指定的时间范围,可以自行指定计时系统;
- usleep_range 使得当前进程休眠指定的微妙数,使用CLOCK_MONOTONIC计时系统;
Linux时间子系统之八:动态时钟框架(CONFIG_NO_HZ、tickless)
在前面章节的讨论中,我们一直基于一个假设:Linux中的时钟事件都是由一个周期时钟提供,不管系统中的clock_event_device是工作于周期触发模式,还是工作于单触发模式,也不管定时器系统是工作于低分辨率模式,还是高精度模式,内核都竭尽所能,用不同的方式提供周期时钟,以产生定期的tick事件,tick事件或者用于全局的时间管理(jiffies和时间的更新),或者用于本地cpu的进程统计、时间轮定时器框架等等。周期性时钟虽然简单有效,但是也带来了一些缺点,尤其在系统的功耗上,因为就算系统目前无事可做,也必须定期地发出时钟事件,激活系统。为此,内核的开发者提出了动态时钟这一概念,我们可以通过内核的配置项CONFIG_NO_HZ来激活特性。有时候这一特性也被叫做tickless,不过还是把它称呼为动态时钟比较合适,因为并不是真的没有tick事件了,只是在系统无事所做的idle阶段,我们可以通过停止周期时钟来达到降低系统功耗的目的,只要有进程处于活动状态,时钟事件依然会被周期性地发出。
/*****************************************************************************************************/
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!
/*****************************************************************************************************/
在动态时钟正确工作之前,系统需要切换至动态时钟模式,而要切换至动态时钟模式,需要一些前提条件,最主要的一条就是cpu的时钟事件设备必须要支持单触发模式,当条件满足时,系统切换至动态时钟模式,接着,由idle进程决定是否可以停止周期时钟,退出idle进程时则需要恢复周期时钟。
1. 数据结构
在上一章的内容里,我们曾经提到,切换到高精度模式后,高精度定时器系统需要使用一个高精度定时器来模拟传统的周期时钟,其中利用了tick_sched结构中的一些字段,事实上,tick_sched结构也是实现动态时钟的一个重要的数据结构,在smp系统中,内核会为每个cpu都定义一个tick_sched结构,这通过一个percpu全局变量tick_cpu_sched来实现,它在kernel/time/tick-sched.c中定义:
- /*
- * Per cpu nohz control structure
- */
- static DEFINE_PER_CPU(struct tick_sched, tick_cpu_sched);
- struct tick_sched {
- struct hrtimer sched_timer;
- unsigned long check_clocks;
- enum tick_nohz_mode nohz_mode;
- ktime_t idle_tick;
- int inidle;
- int tick_stopped;
- unsigned long idle_jiffies;
- unsigned long idle_calls;
- unsigned long idle_sleeps;
- int idle_active;
- ktime_t idle_entrytime;
- ktime_t idle_waketime;
- ktime_t idle_exittime;
- ktime_t idle_sleeptime;
- ktime_t iowait_sleeptime;
- ktime_t sleep_length;
- unsigned long last_jiffies;
- unsigned long next_jiffies;
- ktime_t idle_expires;
- int do_timer_last;
- };
check_clocks 该字段用于实现clock_event_device和clocksource的异步通知机制,帮助系统切换至高精度模式或者是动态时钟模式。
nohz_mode 保存动态时钟的工作模式,基于低分辨率和高精度模式下,动态时钟的实现稍有不同,根据模式它可以是以下的值:
- NOHZ_MODE_INACTIVE 系统动态时钟尚未激活
- NOHZ_MODE_LOWRES 系统工作于低分辨率模式下的动态时钟
- NOHZ_MODE_HIGHRES 系统工作于高精度模式下的动态时钟
idle_tick 该字段用于保存停止周期时钟是的内核时间,当退出idle时要恢复周期时钟,需要使用该时间,以保持系统中时间线(jiffies)的正确性。
tick_stopped 该字段用于表明idle状态的周期时钟已经停止。
idle_jiffies 系统进入idle时的jiffies值,用于信息统计。
idle_calls 系统进入idle的统计次数。
idle_sleeps 系统进入idle且成功停掉周期时钟的次数。
idle_active 表明目前系统是否处于idle状态中。
idle_entrytime 系统进入idle的时刻。
idle_waketime idle状态被打断的时刻。
idle_exittime 系统退出idle的时刻。
idle_sleeptime 累计各次idle中停止周期时钟的总时间。
sleep_length 本次idle中停止周期时钟的时间。
last_jiffies 系统中最后一次周期时钟的jiffies值。
next_jiffies 预计下一次周期时钟的jiffies。
idle_expires 进入idle后,下一个最先到期的定时器时刻。
我们知道,根据系统目前的工作模式,系统提供周期时钟(tick)的方式会有所不同,当处于低分辨率模式时,由cpu的tick_device提供周期时钟,而当处于高精度模式时,是由一个高精度定时器来提供周期时钟,下面我们分别讨论一下在两种模式下的动态时钟实现方式。
2. 低分辨率下的动态时钟
2.1 切换至动态时钟模式
动态时钟模式的切换过程的前半部分和切换至高精度定时器模式所经过的路径是一样的,请参考:Linux时间子系统之六:高精度定时器(HRTIMER)的原理和实现。这里再简单描述一下过程:系统工作于周期时钟模式,定期地发出tick事件中断,tick事件中断触发定时器软中断:TIMER_SOFTIRQ,执行软中断处理函数run_timer_softirq,run_timer_softirq调用hrtimer_run_pending函数:
- void hrtimer_run_pending(void)
- {
- if (hrtimer_hres_active())
- return;
- ......
- if (tick_check_oneshot_change(!hrtimer_is_hres_enabled()))
- hrtimer_switch_to_hres();
- }
首先,该函数通过tick_switch_to_oneshot函数把tick_device的工作模式设置为单触发模式,并把它的中断事件回调函数置换为tick_nohz_handler,接着把tick_sched结构中的模式字段设置为NOHZ_MODE_LOWRES:
- static void tick_nohz_switch_to_nohz(void)
- {
- struct tick_sched *ts = &__get_cpu_var(tick_cpu_sched);
- ktime_t next;
- if (!tick_nohz_enabled)
- return;
- local_irq_disable();
- if (tick_switch_to_oneshot(tick_nohz_handler)) {
- local_irq_enable();
- return;
- }
- ts->nohz_mode = NOHZ_MODE_LOWRES;
- hrtimer_init(&ts->sched_timer, CLOCK_MONOTONIC, HRTIMER_MODE_ABS);
- /* Get the next period */
- next = tick_init_jiffy_update();
- for (;;) {
- hrtimer_set_expires(&ts->sched_timer, next);
- if (!tick_program_event(next, 0))
- break;
- next = ktime_add(next, tick_period);
- }
- local_irq_enable();
- }
2.2 低分辨率动态时钟下的事件中断处理函数
上一节提到,当切换至低分辨率动态时钟模式后,tick_device的事件中断处理函数会被设置为tick_nohz_handler,总体来说,它和周期时钟模式的事件处理函数tick_handle_periodic所完成的工作大致类似:更新时间、更新jiffies计数值、调用update_process_time更新进程信息和触发定时器软中断等等,最后重新编程tick_device,使得它在下一个正确的tick时刻再次触发本函数:
- static void tick_nohz_handler(struct clock_event_device *dev)
- {
- ......
- dev->next_event.tv64 = KTIME_MAX;
- if (unlikely(tick_do_timer_cpu == TICK_DO_TIMER_NONE))
- tick_do_timer_cpu = cpu;
- /* Check, if the jiffies need an update */
- if (tick_do_timer_cpu == cpu)
- tick_do_update_jiffies64(now);
- ......
- if (ts->tick_stopped) {
- touch_softlockup_watchdog();
- ts->idle_jiffies++;
- }
- update_process_times(user_mode(regs));
- profile_tick(CPU_PROFILING);
- while (tick_nohz_reprogram(ts, now)) {
- now = ktime_get();
- tick_do_update_jiffies64(now);
- }
- }
- static int tick_nohz_reprogram(struct tick_sched *ts, ktime_t now)
- {
- hrtimer_forward(&ts->sched_timer, now, tick_period);
- return tick_program_event(hrtimer_get_expires(&ts->sched_timer), 0);
- }
2.3 动态时钟:停止周期tick时钟事件
开启动态时钟模式后,周期时钟的开启和关闭由idle进程控制,idle进程内最终是一个循环,循环的一开始通过tick_nohz_idle_enter检测是否允许关闭周期时钟若干时间,然后进入低功耗的idle模式,当有中断事件使得cpu退出低功耗idle模式后,判断是否有新的进程被激活从而需要重新调度,如果需要则通过tick_nohz_idle_exit重新启用周期时钟,然后重新进行进程调度,等待下一次idle的发生,我们可以用下图来表示:

图2.3.1 idle进程中的动态时钟处理
停止周期时钟的时机在tick_nohz_idle_enter函数中,它把主要的工作交由tick_nohz_stop_sched_tick函数来完成。内核也不是每次进入tick_nohz_stop_sched_tick都会停止周期时钟,那么什么时候才会停止?我们想一想,这时候既然idle进程在运行,说明系统中的其他进程都在等待某种事件,系统处于无事所做的状态,唯一要处理的就是中断,除了定时器中断,其它的中断我们无法预测它会何时发生,但是我们可以知道最先一个到期的定时器的到期时间,也就是说,在该时间到期前,产生周期时钟是没有必要的,我们可以据此推算出周期时钟可以停止的tick数,然后重新对tick_device进行编程,使得在最早一个定时器到期前都不会产生周期时钟,实际上,tick_nohz_stop_sched_tick还做了一些限制:当下一个定时器的到期时间与当前jiffies值只相差1时,不会停止周期时钟,当定时器的到期时间与当前的jiffies值相差的时间大于timekeeper允许的最大idle时间时,则下一个tick时刻被设置timekeeper允许的最大idle时间,这主要是为了防止太长时间不去更新timekeeper中的系统时间,有可能导致clocksource的溢出问题。tick_nohz_stop_sched_tick函数体看起来很长,实现的也就是上述的逻辑,所以这里就不贴它的代码了,有兴趣的读者可以自行阅读内核的代码:kernel/time/tick-sched.c。
看了动态时钟的停止过程和tick_nohz_handler的实现方式,其实还有一个情况没有处理:当系统进入idle进程后,周期时钟被停止若干个tick周期,当这若干个tick周期到期后,tick事件必然会产生,tick_nohz_handler被触发调用,然后最先到期的定时器被处理。但是在tick_nohz_handler的最后,tick_device一定会被编程为紧跟着的下一个tick周期的时刻被触发,如果刚才的定时器处理后,并没有激活新的进程,我们的期望是周期时钟可以用下一个新的定时器重新计算可以停止的时间,而不是下一个tick时刻,但是tick_nohz_handler却仅仅简单地把tick_device的到期时间设为下一个周期的tick时刻,这导致了周期时钟被恢复,显然这不是我们想要的。为了处理这种情况,内核使用了一点小伎俩,我们知道定时器是在软中断中执行的,所以内核在irq_exit中的软件中断处理完后,加入了一小段代码,kernel/softirq.c :
- void irq_exit(void)
- {
- ......
- if (!in_interrupt() && local_softirq_pending())
- invoke_softirq();
- #ifdef CONFIG_NO_HZ
- /* Make sure that timer wheel updates are propagated */
- if (idle_cpu(smp_processor_id()) && !in_interrupt() && !need_resched())
- tick_nohz_irq_exit();
- #endif
- ......
- }
- void tick_nohz_irq_exit(void)
- {
- struct tick_sched *ts = &__get_cpu_var(tick_cpu_sched);
- if (!ts->inidle)
- return;
- tick_nohz_stop_sched_tick(ts);
- }
2.3 动态时钟:重新开启周期tick时钟事件
回到图2.3.1,当在idle进程中停止周期时钟后,在某一时刻,有新的进程被激活,在重新调度前,tick_nohz_idle_exit会被调用,该函数负责恢复被停止的周期时钟。tick_nohz_idle_exit最终会调用tick_nohz_restart函数,由tick_nohz_restart函数最后完成恢复周期时钟的工作。函数并不复杂:先是把上一次停止周期时钟的时刻设置到tick_sched结构的sched_timer定时器中,然后在通过hrtimer_forward函数把该定时器的到期时刻设置为当前时间的下一个tick时刻,对于高精度模式,启动该定时器即可,对于低分辨率模式,使用该时间对tick_device重新编程,最后通过tick_do_update_jiffies64更新jiffies数值,为了防止此时正在一个tick时刻的边界,可能当前时刻正好刚刚越过了该到期时间,函数使用了一个while循环:
- static void tick_nohz_restart(struct tick_sched *ts, ktime_t now)
- {
- hrtimer_cancel(&ts->sched_timer);
- hrtimer_set_expires(&ts->sched_timer, ts->idle_tick);
- while (1) {
- /* Forward the time to expire in the future */
- hrtimer_forward(&ts->sched_timer, now, tick_period);
- if (ts->nohz_mode == NOHZ_MODE_HIGHRES) {
- hrtimer_start_expires(&ts->sched_timer,
- HRTIMER_MODE_ABS_PINNED);
- /* Check, if the timer was already in the past */
- if (hrtimer_active(&ts->sched_timer))
- break;
- } else {
- if (!tick_program_event(
- hrtimer_get_expires(&ts->sched_timer), 0))
- break;
- }
- /* Reread time and update jiffies */
- now = ktime_get();
- tick_do_update_jiffies64(now);
- }
- }
3. 高精度模式下的动态时钟
- NOHZ_MODE_HIGHRES
- NOHZ_MODE_LOWRES
4. 动态时钟对中断的影响
- void tick_check_idle(int cpu)
- {
- tick_check_oneshot_broadcast(cpu);
- tick_check_nohz(cpu);
- }
- static inline void tick_check_nohz(int cpu)
- {
- struct tick_sched *ts = &per_cpu(tick_cpu_sched, cpu);
- ktime_t now;
- if (!ts->idle_active && !ts->tick_stopped)
- return;
- now = ktime_get();
- if (ts->idle_active)
- tick_nohz_stop_idle(cpu, now);
- if (ts->tick_stopped) {
- tick_nohz_update_jiffies(now);
- tick_nohz_kick_tick(cpu, now);
- }
- }