Normal bundle Tangent bundle Tangent space Affine space Vector field Vector calculus Dual bundle
Normal bundle
转自:http://en.wikipedia.org/wiki/Normal_bundle
In differential geometry, a field of mathematics, a normal bundle is a particular kind of vector bundle, complementary to the tangent bundle, and coming from an embedding (or immersion).
Contents
- 1Definition
- 1.1Riemannian manifold
- 1.2General definition
- 2Stable normal bundle
- 3Dual to tangent bundle
- 4For symplectic manifolds
Definition
Let (M,g) be a Riemannian manifold, and a ![]() Riemannian submanifold. Define, for a given
Riemannian submanifold. Define, for a given![]() , a vector to benormal toS whenever g(n,v) = 0 for all (so that n is orthogonal to TpS). The setNpS of all suchn is then called thenormal space toS atp.
, a vector to benormal toS whenever g(n,v) = 0 for all (so that n is orthogonal to TpS). The setNpS of all suchn is then called thenormal space toS atp.
Just as the total space of the tangent bundle to a manifold is constructed from all tangent spaces to the manifold, the total space of the normal bundleNS toS is defined as
The conormal bundle is defined as the dual bundle to the normal bundle. It can be realised naturally as a sub-bundle of thecotangent bundle.
后续:http://en.wikipedia.org/wiki/Normal_bundle
embedding
转自:http://en.wikipedia.org/wiki/Embedding
In mathematics, anembedding (orimbedding) is one instance of somemathematical structure contained within another instance, such as agroup that is asubgroup.
When some object X is said to be embedded in another object Y, the embedding is given by someinjective and structure-preserving mapf :X → Y. The precise meaning of "structure-preserving" depends on the kind of mathematical structure of whichX andY are instances. In the terminology ofcategory theory, a structure-preserving map is called amorphism.
The fact that a map f : X →Y is an embedding is often indicated by the use of a "hooked arrow", thus:On the other hand, this notation is sometimes reserved forinclusion maps.
Given X and Y, several different embeddings of X inY may be possible. In many cases of interest there is a standard (or "canonical") embedding, like those of thenatural numbers in theintegers, the integers in therational numbers, the rational numbers in thereal numbers, and the real numbers in thecomplex numbers. In such cases it is common to identify thedomainX with its image f(X) contained in Y, so that then X ⊆ Y.
Immersion
转自:http://en.wikipedia.org/wiki/Immersion_(mathematics)
In mathematics, animmersion is adifferentiable map betweendifferentiable manifolds whose derivative is everywhere injective. Explicitly, f : M → N is an immersion if
![]()
is an injective map at every point p of M (where the notationTpX represents thetangent space ofX at the point p). Equivalently, f is an immersion if it has constant rank equal to the dimension of M:
The map f itself need not be injective, only its derivative.
A related concept is that of an embedding. A smooth embedding is an injective immersion f : M →N which is also atopological embedding, so thatM is diffeomorphic to its image in N. An immersion is precisely a local embedding – i.e. for any pointthere is a neighbourhood, , of x such that is an embedding, and conversely a local embedding is an immersion.
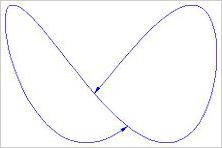 An injectively immersed submanifold that is not an embedding.
An injectively immersed submanifold that is not an embedding.
If M is compact, an injective immersion is an embedding, but if M is not compact then injective immersions need not be embeddings; compare to continuous bijections versushomeomorphisms.
线性函数
定义:设V是数域P上的一个线性空间,f 是V到P的一个映射,如果f满足
式中![]() ,
,![]() 是V中任意元素,k是P中任意数,则称f为V上的一个线性函数
是V中任意元素,k是P中任意数,则称f为V上的一个线性函数
Tangent bundle
转自:http://en.wikipedia.org/wiki/Tangent_bundle

In differential geometry, the tangent bundle of a differentiable manifold M is the disjoint union of the tangent spaces of M. That is,

where TxM denotes thetangent space toM at the pointx. So, an element ofTM can be thought of as apair (x, v), wherex is a point inM andv is a tangent vector toM atX. There is a naturalprojection
![]()
defined by π(x, v) = x. This projection maps each tangent spaceTxM to the single point X.
The tangent bundle to a manifold is the prototypical example of avector bundle (afiber bundle whose fibers arevector spaces). Asection(剖面) ofTM is avector field onM, and the dual bundle to TM is the cotangent bundle, which is the disjoint union of the cotangent spaces of M. By definition, a manifold M is parallelizable if and only if the tangent bundle is trivial. By definition, a manifold M is framed if and only if the tangent bundle TM is stably trivial, meaning that for some trivial bundleE theWhitney sumTM ⊕ E is trivial. For example, then-dimensional sphereSn is framed for alln, but parallelizable only forn=1,3,7 (by results of Bott-Milnor and Kervaire).
Dual bundle
转自:http://en.wikipedia.org/wiki/Dual_bundle
In mathematics, thedual bundle of a vector bundle π : E → X is a vector bundle π* : E* →X whose fibers are thedual spaces to the fibers ofE. The dual bundle can be constructed using theassociated bundle construction by taking thedual representation of thestructure group.
Specifically, given a local trivialization ofE withtransition functionstij, a local trivialization ofE* is given by the same open cover ofX with transition functionstij* = (tijT)−1 (theinverse of the transpose). The dual bundleE* is then constructed using thefiber bundle construction theorem.
For example, the dual to the tangent bundle of a differentiable manifold is the cotangent bundle.
If the base space X is paracompact and Hausdorff then a finite-rank vector bundle E and its dual E* areisomorphic as vector bundles. However, just as forvector spaces, there is nocanonical choice of isomorphism unlessE is equipped with aninner product.
Dual space
转自:http://en.wikipedia.org/wiki/Dual_space
In mathematics, anyvector space,V, has a correspondingdual vector space (or justdual space for short) consisting of alllinear functionals onV. Dual vector spaces defined on finite-dimensional vector spaces can be used for definingtensors which are studied intensor algebra. When applied to vector spaces of functions (which typically are infinite-dimensional), dual spaces are employed for defining and studying concepts likemeasures,distributions, and Hilbert spaces. Consequently, the dual space is an important concept in the study offunctional analysis.
There are two types of dual spaces: thealgebraic dual space, and thecontinuous dual space. The algebraic dual space is defined for all vector spaces. When defined for atopological vector space there is a subspace of this dual space, corresponding to continuous linear functionals, which constitutes a continuous dual space.
Contents
- 1Algebraic dual space
- 1.1Finite-dimensional case
- 1.2Infinite-dimensional case
- 1.3Bilinear products and dual spaces
- 1.4Injection into the double-dual
- 1.5Transpose of a linear map
- 1.6Quotient spaces and annihilators
- 2Continuous dual space
- 2.1Examples
- 2.2Transpose of a continuous linear map
- 2.3Annihilators
- 2.4Further properties
- 2.5Double dual
- 3See also
- 4Notes
- 5References
Algebraic dual space
Given any vector space V over a field F, the dual space V* is defined as the set of alllinear mapsφ:V →F (linear functionals). The dual spaceV* itself becomes a vector space overF when equipped with the following addition and scalar multiplication:

for all φ, ψ ∈ V*, x ∈ V, and a ∈ F. Elements of the algebraic dual space V* are sometimes calledcovectors orone-forms.
The pairing of a functional φ in the dual space V* and an elementx ofV is sometimes denoted by a bracket:φ(x) = [φ, x][1] orφ(x) = ⟨φ, x⟩.[2] The pairing defines a nondegeneratebilinear mapping[3][·,·] :V* × V →F.
finite-dimensional
If V isfinite-dimensional, thenV* has the same dimension asV. Given abasis{e1, ...,en} inV, it is possible to construct a specific basis inV*, called thedual basis. This dual basis is a set{e1, ...,en} of linear functionals onV, defined by the relation
![]()
for any choice of coefficients ci ∈F. In particular, letting in turn each one of those coefficients be equal to one and the other coefficients zero, gives the system of equations
where δij is the Kronecker delta symbol. For example if V is R2, and its basis chosen to be{e1 = (1, 0),e2 = (0, 1)}, thene1 ande2 are one-forms (functions which map a vector to a scalar) such that e1(e1) = 1, e1(e2) = 0, e2(e1) = 0, and e2(e2) = 1. (Note: The superscript here is the index, not an exponent).
In particular, if we interpret Rn as the space of columns ofnreal numbers, its dual space is typically written as the space ofrows ofn real numbers. Such a row acts on Rn as a linear functional by ordinarymatrix multiplication.
If V consists of the space of geometrical vectors (arrows) in the plane, then the level curves of an element of V* form a family of parallel lines inV. So an element ofV* can be intuitively thought of as a particular family of parallel lines covering the plane. To compute the value of a functional on a given vector, one needs only to determine which of the lines the vector lies on. Or, informally, one "counts" how many lines the vector crosses. More generally, ifV is a vector space of any dimension, then the level sets of a linear functional inV* are parallel hyperplanes inV, and the action of a linear functional on a vector can be visualized in terms of these hyperplanes.[4]
Infinite-dimensional caseIf V is not finite-dimensional but has a basis[5]eα indexed by an infinite setA, then the same construction as in the finite-dimensional case yieldslinearly independent elementseα (α ∈A) of the dual space, but they will not form a basis.
Consider, for instance, the space R∞, whose elements are thosesequences of real numbers which have only finitely many non-zero entries, which has a basis indexed by the natural numbersN: for i ∈N,ei is the sequence which is zero apart from theith term, which is one. The dual space ofR∞ isRN, the space of all sequences of real numbers: such a sequence (an) is applied to an element (xn) ofR∞ to give the number ∑anxn, which is a finite sum because there are only finitely many nonzeroxn. Thedimension ofR∞ is countably infinite, whereas RN does not have a countable basis.
This observation generalizes to any[5] infinite-dimensional vector spaceV over any fieldF: a choice of basis {eα :α ∈A} identifiesV with the space (FA)0 of functionsƒ :A → F such that ƒα =ƒ(α) is nonzero for only finitely manyα ∈A, where such a functionƒ is identified with the vector

in V (the sum is finite by the assumption on ƒ, and any v ∈ V may be written in this way by the definition of the basis).
The dual space of V may then be identified with the space FA ofall functions fromA toF: a linear functionalT onV is uniquely determined by the valuesθα =T(eα) it takes on the basis ofV, and any functionθ :A → F (withθ(α) =θα) defines a linear functionalT onV by

Again the sum is finite because ƒα is nonzero for only finitely manyα.
Note that (FA)0 may be identified (essentially by definition) with thedirect sum of infinitely many copies ofF (viewed as a 1-dimensional vector space over itself) indexed byA, i.e., there are linear isomorphisms

On the other hand FA is (again by definition), the direct product of infinitely many copies of F indexed by A, and so the identification
is a special case of a general result relating direct sums (of modules) to direct products.
Thus if the basis is infinite, then there are always more vectors in the dual space than in the original vector space. This is in marked contrast to the case of the continuous dual space, discussed below, which may beisomorphic to the original vector space even if the latter is infinite-dimensional.
后继见:http://en.wikipedia.org/wiki/Dual_space
Tangent space
转自:http://zh.wikipedia.org/wiki/%E5%88%87%E7%A9%BA%E9%97%B4
切空间(英文:tangent space)是在某一点所有的切向量组成的线性空间。向量(切向量)存在多种定义。直观的讲,如果所研究的流形是一个三维空间中的曲面,则在每一点的切向量,就是和该曲面相切的向量,切空间就是和该曲面相切的平面。通常情形下,因为所有流形可以嵌入欧几里得空间,切空间也可以理解为在该点和流形相切的欧几里得空间的仿射子空间。切空间更好的定义不依赖于这种嵌入,例如,切向量可以定义为通过该点的曲线的等价类,或者是对光滑函数在该点的在某个方向上的求导。但所有这些定义都是等价的。
转自:http://en.wikipedia.org/wiki/Tangent_space
In mathematics, thetangent space of amanifold facilitates the generalization of vectors fromaffine spaces to general manifolds, since in the latter case one cannot simply subtract two points to obtain a vector pointing from one to the other.

In differential geometry, one can attach to every point x of a differentiable manifold a tangent space, a real vector space which intuitively contains the possible "directions" in which one can tangentially pass throughx. The elements of the tangent space are calledtangent vectors atx. This is a generalization of the notion of abound vector in aEuclidean space. All the tangent spaces have the samedimension, equal to the dimension of the manifold.
For example, if the given manifold is a 2-sphere, one can picture the tangent space at a point as the plane which touches the sphere at that point and isperpendicular(垂直的) to the sphere's radius through the point. More generally, if a given manifold is thought of as anembedded submanifold ofEuclidean space one can picture the tangent space in this literal fashion.
In algebraic geometry, in contrast, there is an intrinsic definition of tangent space at a point P of a variety V, that gives a vector space of dimension at least that of V. The points P at which the dimension is exactly that of V are called thenon-singular points; the others aresingular points. For example, a curve that crosses itself doesn't have a unique tangent line at that point. The singular points ofV are those where the 'test to be a manifold' fails. SeeZariski tangent space.
Once tangent spaces have been introduced, one can define vector fields, which are abstractions of the velocity field of particles moving on a manifold. A vector field attaches to every point of the manifold a vector from the tangent space at that point, in a smooth manner. Such a vector field serves to define a generalized ordinary differential equation on a manifold: a solution to such a differential equation is a differentiablecurve on the manifold whose derivative at any point is equal to the tangent vector attached to that point by the vector field.
All the tangent spaces can be "glued together" to form a new differentiable manifold of twice the dimension, thetangent bundle of the manifold.
Vector field
In vector calculus, a vector field is an assignment of a vector to each point in a subset of Euclidean space. A vector field in the plane for instance can be visualized as an arrow, with a given magnitude and direction, attached to each point in the plane. Vector fields are often used to model, for example, the speed and direction of a moving fluid throughout space, or the strength and direction of some force, such as the magnetic or gravitational force, as it changes from point to point.
The elements of differential and integral calculus extend to vector fields in a natural way. When a vector field represents force, theline integral of a vector field represents the work done by a force moving along a path, and under this interpretationconservation of energy is exhibited as a special case of thefundamental theorem of calculus. Vector fields can usefully be thought of as representing the velocity of a moving flow in space, and this physical intuition leads to notions such as thedivergence (which represents the rate of change of volume of a flow) andcurl (which represents the rotation of a flow).
In coordinates, a vector field on a domain in n-dimensional Euclidean space can be represented as avector-valued function that associates ann-tuple of real numbers to each point of the domain. This representation of a vector field depends on the coordinate system, and there is a well-definedtransformation law in passing from one coordinate system to the other. Vector fields are often discussed onopen subsets of Euclidean space, but also make sense on other subsets such assurfaces, where they associate an arrow tangent to the surface at each point (atangent vector).
More generally, vector fields are defined on differentiable manifolds, which are spaces that look like Euclidean space on small scales, but may have more complicated structure on larger scales. In this setting, a vector field gives a tangent vector at each point of the manifold (that is, asection of the tangent bundle to the manifold). Vector fields are one kind of tensor field.
Vector calculus
Vector calculus (or vector analysis) is a branch ofmathematics concerned withdifferentiation andintegration ofvector fields, primarily in 3 dimensionalEuclidean spaceThe term "vector calculus" is sometimes used as a synonym for the broader subject ofmultivariable calculus, which includes vector calculus as well aspartial differentiation and multiple integration. Vector calculus plays an important role in differential geometry and in the study of partial differential equations. It is used extensively in physics and engineering, especially in the description of electromagnetic fields, gravitational fields and fluid flow.
Vector calculus was developed from quaternion analysis by J. Willard Gibbs and Oliver Heaviside near the end of the 19th century, and most of the notation and terminology was established by Gibbs andEdwin Bidwell Wilson in their 1901 book,Vector Analysis. In the traditional form using cross products, vector calculus does not generalize to higher dimensions, while the alternative approach ofgeometric algebra, which uses exterior products does generalize, as discussed below.
Affine space
In mathematics, anaffine space is a geometricstructure that generalizes the affine properties of Euclidean space. In an affine space, one can subtract points to get vectors, or add a vector to a point to get another point, but one cannot add points. In particular, there is no distinguished point that serves as an origin. The solution set of an inhomogeneous linear equation is either empty or an affine space.