抖动算法 精~~~~~~~~~~~~~~~
讲抖动算法,一般都会提到图案法。
图案法(patterning)是指灰度可以用一定比例的黑白点组成的区域表示,从而达到整体图象的灰度感。黑白点的位置选择称为图案化。
先岔开说说分辨率,计算机显示器,打印机,扫描仪等设备的一个重要指标就是分辨率,单位是dpi(dot per inch),即每英寸点数,点数越多,分辨率就越高,图象就越清晰。让我们来计算一下,计算机显示器的分辨率有多高。设显示器为15英寸(指对角线长度),最多显示1280×1024个点。因为宽高比为4:3,所以宽有12英寸,高有9英寸,则该显示器的水平分辨率为106dpi,垂直分辨率为113.8dpi。一般的激光打印机的分辨率有300dpi×300dpi,600dpi×600dpi,720dpi×720dpi。所以打出来的图象要比计算机显示出来的清晰的多。扫描仪的分辨率要高一些,数码相机的分辨率更高。
言归正传,前面讲了,图案化使用图案来表示象素的灰度,那么我们来做一道计算题。假设有一幅240×180×8bit的灰度图,当用分辨率为300dpi×300dpi的激光打印机将其打印到12.8×9.6英寸的纸上时,每个象素的图案有多大?
这道题很简单,这张纸最多可以打(300×12.8) ×(300×9.6)=3840×2880个点,所以每个象素可以用(3840/240)×(2880/180)=16×16个点大小的图案来表示,即一个象素256个点。如果这16×16的方块中一个黑点也没有,就可以表示灰度256;有一个黑点,就表示灰度255;依次类推,当都是黑点时,表示灰度0。这样,16×16的方块可以表示257级灰度,比要求的8bit共256级灰度还多了一个。所以上面的那幅图的灰度级别完全能够打印出来。
这里有一个图案构成的问题,即黑点打在哪里?比如说,只有一个黑点时,我们可以打在正中央,也可以打16×16的左上角。图案可以是规则的,也可以是不规则的。一般情况下,有规则的图案比随即图案能够避免点的丛集,但有时会导致图象中有明显的线条。
如下图所示,2×2的图案可以表示5级灰度,

当图象中有一片灰度为的1的区域时,如下所示,有明显的水平和垂直线条。

如果想存储256级灰度的图案,就需要256×16×16的二值点阵,占用的空间还是相当可观的。有一个更好的办法是:只存储一个整数矩阵,称为标准图案,其中的每个值从0到255。图象的实际灰度和阵列中的每个值比较,当该值大于等于灰度时,对应点打一黑点。下面举一个25级灰度的例子加以说明。
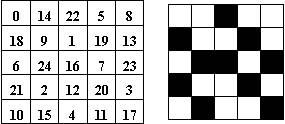
上图,左边为标准图案,右边为灰度为15的图案,共有10个黑点,15个白点。其实道理很简单,灰度为0时全是黑点,灰度每增加1,减少一个黑点。要注意的是,5×5的图案可以表示26种灰度,当灰度是25才是全白点,而不是灰度为24时。下面介绍一种设计标准图案的算法,是由Limb在1969年提出的。
先以一个2×2的矩阵开始:设

通过递归关系有:

其中Mn和Un均为2n×2n的方阵,Un的所有元素都是1。根据这个算法,可以得到

为16级灰度的标准图案。
M3(8×8阵)比较特殊,称为Bayer抖动表。M4是一个16×16的矩阵。
根据上面的算法,如果利用M3一个象素要用8×8的图案表示,则一幅N×N的图将变成8N×8N大小。如果利用M4,就更不得了,变成16N×16N了。能不能在保持原图大小的情况下利用图案化技术呢?一种很自然的想法是:如果用M2阵,则将原图中每8×8个点中取一点,即重新采样,然后再应用图案化技术,就能够保持原图大
小。实际上,这种方法并不可行。首先,你不知道这8×8个点中找哪一点比较合适,另外,8×8的间隔实在太大了,生成的图象和原图肯定相差很大,就象下图最右边的那幅图一样。

我们可以采用这样的做法:假设原图是256级灰度,利用Bayer抖动表,做如下处理
if (g[y][x]>>2) > bayer[y&7][x&7] then 打一白点 else 打一黑点
其中,x,y代表原图的象素坐标,g[y][x]代表该点灰度。首先将灰度右移两位,变成64级,然后将x,y做模8运算,找到Bayer表中的对应点,两者做比较,根据上面给出的判据做处理。
我们可以看到,模8运算使得原图分成了一个个8×8的小块,每个小块和8×8的Bayer表相对应。小块中的每个点都参与了比较,这样就避免了上面提到的选点和块划分过大的问题。模8运算实质上是引入了随机成分,这就是我们下面要讲到的抖动技术。
上图就是利用了这个算法,使用M3(Bayer抖动表)阵得到的;下图是使用M4阵得到的,可见两者的差别并不是很大,所以一般用Bayer表就可以了。
让我们考虑更坏的情况:即使使用了图案化技术,仍然得不到要求的灰度级别。举例说明:假设有一幅600×450×8bit的灰度图,当用分辨率为300dpi×300dpi的激光打印机将其打印到8×6英寸的纸上时,每个象素可以用(2400/600)×(1800/450)=4×4个点大小的图案来表示,最多能表示17级灰度,无法满足256级灰度的要求。可有两种解决方案:(1)减小图象尺寸,由600×450变为150×113;(2)降低图象灰度级,由256级变成16级。这两种方案都不理想。这时,我们就可以采用“抖动法”(dithering)的技术来解决这个问题。其实刚才给出的算法就是一种抖动算法,称为规则抖动(regular dithering)。规则抖动的优点是算法简单;缺点是图案化有时很明显,这是因为取模运算虽然引入了随机成分,但还是有规律的。另外,点之间进行比较时,只要比标准图案上点的值大就打白点,这种做法并不理想,因为,如果当标准图案点的灰度值本身就很小,而图象中点的灰度只比它大一点儿时,图象中的点更接近黑色,而不是白色。一种更好的方法是将这个误差传播到邻近的象素。
下面介绍的Floyd-Steinberg算法就采用了这种方案。
假设灰度级别的范围从b(black)到w(white),中间值t为(b+w)/2,对应256级灰度,b=0,w=255,t=127.5。设原图中象素的灰度为g,误差值为e,则新图中对应象素的值用如下的方法得到:
if g > t then
打白点
e=g-w
else
打黑点
e=g-b
3/8 × e 加到右边的象素
3/8 × e 加到下边的象素
1/4 × e 加到右下方的象素
算法的意思很明白:以256级灰度为例,假设一个点的灰度为130,在灰度图中应该是一个灰点。由于一般图象中灰度是连续变化的,相邻象素的灰度值很可能与本象素非常接近,所以该点及周围应该是一片灰色区域。在新图中,130大于128,所以打了白点,但130离真正的白点255还差的比较远,误差e=130-255=-125比较大。将3/8×(-125)加到相邻象素后,使得相邻象素的值接近0而打黑点。下一次,e又变成正的,使得相邻象素的相邻象素打白点,这样一白一黑一白,表现出来刚好就是灰色。如果不传递误差,就是一片白色了。再举个例子,如果一个点的灰度为250,在灰度图中应该是一个白点,该点及周围应该是一片白色区域。在新图中,虽然e=-5也是负的,但其值很小,对相邻象素的影响不大,所以还是能够打出一片白色区域来。这样就验证了算法的正确性。
其它的情况你可以自己推敲。下图是利用Floyd-Steinberg算法抖动生成的图。

这里检讨一下,自己虽然是个搞C/C++的,为了偷懒,先用Matlab解决问题……
这里是Matlab的Bayer抖动的算法,用于将256级别的灰度图像抖动成同样尺寸的黑白图片。
clear;
clc;
m1 = [[0 2];[3 1]];
u1=ones(2, 2);
m2=[[4*m1 4*m1+2*u1];[4*m1+3*u1 4*m1+u1]]
u2=ones(4, 4);
m3=[[4*m2 4*m2+2*u2];[4*m2+3*u2 4*m2+u2]]
I = imread('test.bmp');
gI = .2989*I(:,:,1)...
+.5870*I(:,:,2)...
+.1140*I(:,:,3);
%imshow(gI);
%r = I(:,:,1);
%g = I(:,:,2);
%b = I(:,:,3);
[h w] = size(gI);
bw = 0;
for i=1:h
for j=1:w
if (gI(i,j) / 4> m3(bitand(i, 7) + 1, bitand(j,7) + 1))
bw(i,j)= 255;
else
bw(i,j)= 0;
end
end
end
imshow(bw);
算法具体思想见《抖动算法小议1》。
这里再说说如何将24bit的真彩色图片变为15bit 或者16bit的图片。还是使用Floyd-steinberg算法。先说说15Bit的组成,红色5bit,绿色5bit,蓝色5bit,1位预留。16Bit的颜色,红、绿、蓝分别是5Bit, 6Bit, 5Bit。这是因为人眼对灰度的感觉比色彩要强,绿色对灰度的贡献最多,所以,多1个bit的绿色量化会使得灰度层次表示更加丰富。
clear;
clc;
I = imread('0001.jpg');
img = double(I);%转换图片
[h w] = size(img(:,:,1));%取得图片的大小
d = 1;%为1时,误差从左传递到右侧,为-1时,误差从右传递到左
re = 0;
ge = 0;
be = 0;
rs = 8;%2^n, n = 3 表示将红色量化等级减少到2^5 = 32种。
gs = 8;%2^n, n = 3 表示将绿色量化等级减少到2^5 = 32种。
bs = 8;%2^n, n = 3 表示将蓝色量化等级减少到2^5 = 32种。
for i=1:h
for j=1:w
if (d == 1)
val = rs * fix(img(i,j,1) / rs);
re = img(i, j, 1) - val;
img(i, j, 1) = val;
val = gs * fix(img(i,j,2) / gs);
ge = img(i, j, 2) - val;
img(i, j, 2) = val;
val = bs * fix(img(i,j,3) / bs);
be = img(i, j, 3) - val;
img(i, j, 3) = val;
if ((j + 1) <= w)%计算误差对右侧的像素的传递
img(i, j + 1, 1) = img(i, j + 1, 1) + re * 3 / 8;
img(i, j + 1, 2) = img(i, j + 1, 2) + ge * 3 / 8;
img(i, j + 1, 3) = img(i, j + 1, 3) + be * 3 / 8;
end
if ((i + 1) <= h)%计算误差对下侧的像素传递
img(i + 1, j, 1) = img(i + 1, j, 1) + re * 3 / 8;
img(i + 1, j, 2) = img(i + 1, j, 2) + ge * 3 / 8;
img(i + 1, j, 3) = img(i + 1, j, 3) + be * 3 / 8;
end
if ((i + 1) <= h && (j + 1) <= w)%计算误差对右下侧的像素传递
img(i + 1, j + 1, 1) = img(i + 1, j + 1, 1) + re / 4;
img(i + 1, j + 1, 2) = img(i + 1, j + 1, 2) + ge / 4;
img(i + 1, j + 1, 3) = img(i + 1, j + 1, 3) + be / 4;
end
else
val = rs * fix(img(i,w - j + 1,1) / rs);
re = img(i, w - j + 1, 1) - val;
img(i, w - j + 1, 1) = val;
val = gs * fix(img(i,w - j + 1,2) / gs);
ge = img(i, w - j + 1, 2) - val;
img(i, w - j + 1, 2) = val;
val = bs * fix(img(i,w - j + 1,3) / bs);
be = img(i, w - j + 1, 3) - val;
img(i, w - j + 1, 3) = val;
if ((w - j) > 0)%计算误差对左侧的误差传递
img(i, w - j, 1) = img(i, w - j, 1) + re * 3 / 8;
img(i, w - j, 2) = img(i, w - j, 2) + ge * 3 / 8;
img(i, w - j, 3) = img(i, w - j, 3) + be * 3 / 8;
end
if (i + 1 <= h)%计算误差对下侧的像素误差传递
img(i + 1, j, 1) = img(i + 1, j, 1) + re * 3 / 8;
img(i + 1, j, 2) = img(i + 1, j, 2) + ge * 3 / 8;
img(i + 1, j, 3) = img(i + 1, j, 3) + be * 3 / 8;
end
if ((i + 1) <= h && (w - j) > 0)%计算误差对左下侧的像素误差传递
img(i + 1, w - j, 1) = img(i + 1, w - j, 1) + re / 4;
img(i + 1, w - j, 2) = img(i + 1, w - j, 2) + ge / 4;
img(i + 1, w - j, 3) = img(i + 1, w - j, 3) + be / 4;
end
end
end
d = -d;
end
out = uint8(img);
imshow(out)
这个是处理的原图片:

这个是处理后的图片:

如果将24Bit的真彩色图片转换为更低量化级别的图片的时候,其实还是使用Floyd-Steinberg算法,但是直接使用这个算法,效果并不好。原因在于,当颜色特别丰富的图片转换成低彩色的时候,即使用了误差传递,也会因为没有选取合适的颜色表示临近的颜色而产生较大的误差。上篇文章中我们说了24Bit的图片转换为15Bit的图片,颜色的选取,我们看到是直接将 r = r & 0xF8。实际上是直接把图像的低三位信息截去,然后把低三位的信息损失作为误差传递到周围的像素。对于15Bit这样的量化级别,这个方法还是可以接受的。但是对于24Bit的图像变为8Bit,这个算法会产生比较大的误差,并不是Floyd-Steinberg算法的问题,而是颜色选取的不合适,造成了即使有误差传递,图片的失真还是比较大。
这里介绍三种颜色选取的办法:
- 流行色算法
流行色算法的基本思路是:对彩色图像中所有彩色出现的次数做统计分析,创建一个
数组用于表示颜色和颜色出现频率的统计直方图。按出现频率递减的次序对该直方图数组排序后,直方图中的前256 种颜色就是图像中出现次放最多(频率最大) 的256 种颜色,将它们作为调色板的颜色。该算法用统计直方图来分析颜色出现的频率,因此且称为彩色直方图统计算法。图像中其他的颜色采用在RGB 颜色空间中的最小距离原则映射到与其邻近的256种调色板颜色上。流行色算法实现较简单, 对颜色数量较小的图像可以产生较好的结果,但是该算法存在的主要缺陷是,图像中一些出现频率较低, 但对人眼的视觉效挺明显的信息将丢失。比如,图像中存在的高亮度斑点,由于出现的次数少, 很可能不能被算法选中,将被丢失。
- 中位切分算法
中位切分算法的基本思路是:在RGB 彩色空间中, R 、G 、B 三基色对所对应于空间的三个坐标轴,将每坐标轴部量化为0 - 255 。对应于最暗(黑) , 255 对应于最亮,这样就形成了一个边长为256 的彩色立方体。所有可能的颜色都对与立方体内的一个点; 将彩色方体切分成256个小立方体,每个立方体中都包含相同数量的在图像中出现的颜色点;取出每个小立方体的中心点, 则这些点所表示的颜色就是我们所需要的最能代表图像颜色特征的256 种颜色。
中位切分算法是PauJ Heckbert在80 年代初提出来的,现被广泛应用于图像处理领域。该算法的缺点是涉及复杂的排序工作,而且内存开销较大。
- 八叉树算法
1988 年,奥地利的M. Gervautz和W. Purgathofer 发表了一篇题为"A Simple Method for Color Quantization: Octree Quantization" 的论文,提出了种新的采用八义树数据结构的颜色量化算法,一般称为八叉树颜色量化算法。该算法的效率比中位切分算法高而且内存开销小。
八叉树颜色量化算法的基本思路是:将图像中使用的RGB 颜色值分布到层状的八叉树中。八叉树的深度可达九层,即根节点层加上分别表示8位的R、G 、B 值的每一位的八层节点。较低的节点层对应于较不重要的RGB 值的位(右边的位) , 因此, 为了提高效率和节省内存,可以去掉最低部的2 ~ 3 层, 这样不会对结果有太大的影响。叶节点编码存储像素的个数和R 、G 、B 颜色分量的值;而中间的节点组成了从最顶层到叶节点的路径。这是一种高效的存储方式,既可以存储图像中出现的颜色和其出现的次数,也不会浪费内存来存储图像中不出现的颜色。
扫描图像的所有像素, 每遇到种新的颜色就将它放入八叉树中,并创建一个叶节点。图像扫描完后,如果叶子节点的数量大于调色板所需的颜色数时, 就需要将有些叶子节点合并到其上一层节点中, 并将该节点转化成叶节点, 在其中存储颜色且其出现的次数。这样,减少叶节点的数量,直到叶节点的数量等于或小于调色板所需的颜色数。如果叶节点的数量小于或等于调色板所需的颜色数,则可以遍历八叉树,将叶子节点的颜色填入调色饭的颜色表。
我个人比较推荐八叉树算法,但是还有比八叉树更简单的算法,那就是固定色表的算法。大致思路是:
选取一个比较好的色表为固定色表。然后不管什么图像,每个颜色选取这个色表中值最接近的颜色。这样势必会产生误差,这个误差就可以使用Floyd-Steinberg算法,传递到周围像素,效果也比较好,速度也很快。
这个算法的关键就在于如何快速的寻找到色表中最接近的颜色。晕太晚了,下次接着侃……