marvell mmp3 pxa2128 sd8787 bluetooth code analysis
本文单板mmp3 pxa2128
我们先看下probe过程吧,然后再一个一个展开讲解
/**
* @brief This function probe the card
*
* @param func A pointer to sdio_func structure.
* @param id A pointer to structure sd_device_id
* @return BT_STATUS_SUCCESS/BT_STATUS_FAILURE or other error no.
*/
static int
sd_probe_card(struct sdio_func *func, const struct sdio_device_id *id)
{
int ret = BT_STATUS_SUCCESS;
bt_private *priv = NULL;
struct sdio_mmc_card *card = NULL;
ENTER();
PRINTM(INFO, "BT: vendor=0x%x,device=0x%x,class=%d,fn=%d\n", id->vendor,
id->device, id->class, func->num);
card = kzalloc(sizeof(struct sdio_mmc_card), GFP_KERNEL);
if (!card) {
ret = -ENOMEM;
goto done;
}
card->func = func;
#if LINUX_VERSION_CODE >= KERNEL_VERSION(2,6,27)
/* wait for chip fully wake up */
if (!func->enable_timeout)
func->enable_timeout = 200;
#endif
/*
驱动中使用mmc_claim_host(host);来得知,当前mmc控制器是否被占用,
当前mmc控制器如果被占用,那么 host->claimed = 1;否则为0,如果为1,
那么会在for(;;)循环中调用schedule切换出自己,当占用mmc控制器的
操作完成之后,执行 mmc_release_host()的时候,会激活登记到等待队
列&host->wq中的其他程序获得mmc主控制器的物理使用权*/
sdio_claim_host(func);
/* mmc_io_rw_direct()把所有参数直接传递给mmc_io_rw_direct_host()
SDIO功能部分简单了解下就可*/
/*使能sdio功能设备*/
ret = sdio_enable_func(func);
if (ret) {
sdio_disable_func(func);
sdio_release_host(func);
PRINTM(FATAL, "BT: sdio_enable_func() failed: ret=%d\n", ret);
kfree(card);
LEAVE();
return -EIO;
}
/* 释放mmc控制器 */
sdio_release_host(func);
priv = bt_add_card(card);
if (!priv) {
sdio_claim_host(func);
sdio_disable_func(func);
sdio_release_host(func);
ret = BT_STATUS_FAILURE;
kfree(card);
}
done:
LEAVE();
return ret;
}
这里主要讲解download firmware
再看bt_add_card(card)函数实现:
/**
* @brief This function adds the card. it will probe the
* card, allocate the bt_priv and initialize the device.
*
* @param card A pointer to card
* @return A pointer to bt_private structure
*/
bt_private *
bt_add_card(void *card)
{
struct hci_dev *hdev = NULL;
bt_private *priv = NULL;
ENTER();
priv = kzalloc(sizeof(bt_private), GFP_KERNEL);
if (!priv) {
PRINTM(FATAL, "Can not allocate priv\n");
LEAVE();
return NULL;
}
/* allocate buffer for bt_adapter */
if (!(priv->adapter = kzalloc(sizeof(bt_adapter), GFP_KERNEL))) {
PRINTM(FATAL, "Allocate buffer for bt_adapter failed!\n");
goto err_kmalloc;
}
/* 初始化发送队列,挂起队列及command队列的头*/
bt_init_adapter(priv);
/* Register to HCI Core */
hdev = hci_alloc_dev();
if (!hdev) {
PRINTM(FATAL, "Can not allocate HCI device\n");
goto err_kmalloc;
}
PRINTM(INFO, "Starting kthread...\n");
priv->MainThread.priv = priv;
spin_lock_init(&priv->driver_lock);
/* 通过固件产生收发事件,从固件接受数据包,并
将接受的数据包发送给kernel */
bt_create_thread(bt_service_main_thread, &priv->MainThread,
"bt_main_service");
/* wait for mainthread to up */
while (!priv->MainThread.pid) {
os_sched_timeout(1);
}
priv->bt_dev.hcidev = hdev;
priv->bt_dev.card = card;
hdev->driver_data = priv;
((struct sdio_mmc_card *) card)->priv = priv;
priv->adapter->sd_ireg = 0;
/*
* Register the device. Fillup the private data structure with
* relevant information from the card and request for the required
* IRQ.
*/
if (sbi_register_dev(priv) < 0) {
PRINTM(FATAL, "Failed to register bt device!\n");
goto err_registerdev;
}
if (bt_init_fw(priv)) {
PRINTM(FATAL, "BT Firmware Init Failed\n");
goto err_init_fw;
}
LEAVE();
return priv;
err_init_fw:
PRINTM(INFO, "unregister device\n");
sbi_unregister_dev(priv);
err_registerdev:
((struct sdio_mmc_card *) card)->priv = NULL;
/* Stop the thread servicing the interrupts */
priv->adapter->SurpriseRemoved = TRUE;
wake_up_interruptible(&priv->MainThread.waitQ);
while (priv->MainThread.pid) {
os_sched_timeout(1);
}
err_kmalloc:
if (hdev)
kfree(hdev);
if (priv->adapter)
bt_free_adapter(priv);
kfree(priv);
LEAVE();
return NULL;
}
这段代码在sbi_register_dev(priv)后便调用了我们关注的bt_init_fw(priv)函数。
下面我们详解bt_init_fw函数过程
首先要说明下hci_dev中的几个函数指针{open;close;flush;send;destruct;ioctl}由代码bt_main.c中的sd_register_conf_dpc这个函数注册
函数实现:
/**
* @brief This function initializes firmware
*
* @param priv A pointer to bt_private structure
* @return BT_STATUS_SUCCESS or BT_STATUS_FAILURE
*/
static int
bt_init_fw(bt_private * priv)
{
int ret = BT_STATUS_SUCCESS;
ENTER();
if (fw == 0) { //fw这是个全局变量,当firmware已经初始化时将不再初始化,使能host后直接返回OK,假设尚未初始化的话,那么就执行sbi_disable_host_int函数
sbi_enable_host_int(priv);
goto done;
}
sbi_disable_host_int(priv);
priv->fw_crc_check = fw_crc_check; //为1,进行CRC校验
if (sbi_download_fw(priv)) { //这里就开始download firmware了!!下面着重讲解download
PRINTM(ERROR, "BT FW failed to be download!\n");
ret = BT_STATUS_FAILURE;
goto done;
}
done:
LEAVE();
return ret;
}
download firmware过程代码蛮复杂,我们慢慢分析!
sdio_claim_host(card->func);
if (BT_STATUS_SUCCESS == sd_verify_fw_download(priv, 1)) { //第一大事情是确实固件是否准备好接受cmd
PRINTM(MSG, "BT: FW already downloaded!\n");
sdio_release_host(card->func);
sbi_enable_host_int(priv);
if (BT_STATUS_FAILURE == sd_register_conf_dpc(priv)) { // 注册hci_dev需要的几大函数指针,上文已经提到
PRINTM(ERROR,
"BT: sd_register_conf_dpc failed. Terminating download\n");
ret = BT_STATUS_FAILURE;
}
goto exit;
}
如何确认固件是否已经好的话,调用sd_read_firmware_status此函数,如下所示:
/**
* @brief This function reads fwstatus registers
*
* @param priv A pointer to bt_private structure
* @param dat A pointer to keep returned data
* @return BT_STATUS_SUCCESS or BT_STATUS_FAILURE
*/
static int //此函数实际被sd_verify_fw_download他调用
sd_read_firmware_status(bt_private * priv, u16 * dat)
{
int ret = BT_STATUS_SUCCESS;
u8 fws0;
u8 fws1;
struct sdio_mmc_card *card = (struct sdio_mmc_card *) priv->bt_dev.card;
ENTER(); // 调试信息
fws0 = sdio_readb(card->func, CARD_FW_STATUS0_REG, &ret); //读reg FW_STATUS0
if (ret < 0) {
LEAVE();
return BT_STATUS_FAILURE;
}
fws1 = sdio_readb(card->func, CARD_FW_STATUS1_REG, &ret); //读reg FW_STATUS1
if (ret < 0) {
LEAVE();
return BT_STATUS_FAILURE;
}
*dat = (((u16) fws1) << 8) | fws0;
LEAVE();
return BT_STATUS_SUCCESS; //我们都假设成功正常返回
}
假设这个函数成功了,那么将进行sd_register_conf_dpc(前面两个函数不说了,大家应该都比较清楚了!),这个函数的注释说用来:第一,模块组态;第二注册设备。
在把hci_dev的函数指针都填充后调用bt_send_module_cfg_cmd
hdev->open = bt_open;
hdev->close = bt_close;
hdev->flush = bt_flush;
hdev->send = bt_send_frame;
hdev->destruct = bt_destruct;
hdev->ioctl = bt_ioctl;这个函数涉及到了sk_buff这个网络里面常用的结构体,同时注释里面说明了发送module cfg cmd到firmware的格式
/** * @brief This function send module cfg cmd to firmware * * Command format: * +--------+--------+--------+--------+--------+--------+--------+ * | OCF OGF | Length | Data | * +--------+--------+--------+--------+--------+--------+--------+ * | 2-byte | 1-byte | 4-byte | * +--------+--------+--------+--------+--------+--------+--------+ * * @param priv A pointer to bt_private structure * @param subcmd sub command * @return BT_STATUS_SUCCESS or BT_STATUS_FAILURE */
int
bt_send_module_cfg_cmd(bt_private * priv, int subcmd)
{
struct sk_buff *skb = NULL;
u8 ret = BT_STATUS_SUCCESS;
BT_CMD *pCmd;
ENTER();
skb = bt_skb_alloc(sizeof(BT_CMD), GFP_ATOMIC);
if (skb == NULL) {
PRINTM(WARN, "BT: No free skb\n");
ret = BT_STATUS_FAILURE;
goto exit;
}
pCmd = (BT_CMD *) skb->tail; //填充sk_buff
pCmd->ocf_ogf = (OGF << 10) | BT_CMD_MODULE_CFG_REQ; //(0x3f << 10 | 0x5b)
pCmd->length = 1;
pCmd->data[0] = subcmd; //MODULE_BRINGUP_REQ 0xf1
bt_cb(skb)->pkt_type = MRVL_VENDOR_PKT; // 0xfe
skb_put(skb, sizeof(BT_CMD));
skb->dev = (void *) priv->bt_dev.hcidev;
skb_queue_head(&priv->adapter->tx_queue, skb); //吧skb插入tx_queue链表中
priv->bt_dev.sendcmdflag = TRUE;
priv->bt_dev.send_cmd_ocf = BT_CMD_MODULE_CFG_REQ; //0x5b
priv->adapter->cmd_complete = FALSE;
PRINTM(CMD, "Queue module cfg Command(0x%x)\n", pCmd->ocf_ogf);
wake_up_interruptible(&priv->MainThread.waitQ);//唤醒在probe时创建的线程来处理这个skb
/*
On some Android platforms certain delay is needed for HCI daemon to
remove this module and close itself gracefully. Otherwise it hangs. This
10ms delay is a workaround for such platforms as the root cause has not
been found yet. */
mdelay(10);
if (!os_wait_interruptible_timeout
(priv->adapter->cmd_wait_q, priv->adapter->cmd_complete,
WAIT_UNTIL_CMD_RESP)) {
ret = BT_STATUS_FAILURE;
PRINTM(MSG, "BT: module_cfg_cmd (0x%x): timeout sendcmdflag=%d\n",
subcmd, priv->bt_dev.sendcmdflag);
} else {
PRINTM(CMD, "BT: module cfg Command done\n");
}
exit:
LEAVE();
return ret;
}
下面返回后到电源管理部分,主要是powermode以及suspend /resume
调用bt_enable_ps及bt_send_hscfg_cmd最后再
wake_up_interruptible(&priv->MainThread.waitQ);
然后调用ret = hci_register_dev(hdev);这个函数在hci_core.c,三个tasklet分别对应hci_cmd_task,hci_rx_task,hci_tx_task以及一个单线程工作队列。
在这个
然后调用bt_init_config(priv, init_cfg) 在bt_init.c中
调用request_firmware -> bt_process_init_cfg(priv, (u8 *) cfg->data, cfg->size);
->bt_set_mac_address(priv, bt_mac) 在这里设置了mac,这个函数实现在bt_main.c中,这个过程也是通过sk_buff这个结构体。
最后再创建bt_proc_init(priv);用户空间文件,函数sd_register_conf_dpc就执行完毕了。
然后调用sd_download_firmware_w_helper(priv)这个函数下载firmware
/**
* @brief This function downloads firmware image to the card.
*
* @param priv A pointer to bt_private structure
* @return BT_STATUS_SUCCESS/BT_STATUS_FAILURE or other error no.
*/
int
sd_download_firmware_w_helper(bt_private * priv)
{
int ret = BT_STATUS_SUCCESS;
int err;
char *cur_fw_name = NULL;
ENTER();
cur_fw_name = fw_name;
if (req_fw_nowait) {
#if LINUX_VERSION_CODE > KERNEL_VERSION(2,6,32)
if ((ret = request_firmware_nowait(THIS_MODULE, FW_ACTION_HOTPLUG,
cur_fw_name, priv->hotplug_device,
GFP_KERNEL, priv,
sd_request_fw_callback)) < 0)
//实际上下载过程就是最后一个回调函数sd_request_fw_callback了,有兴趣可仔细阅读下。
#else
if ((ret = request_firmware_nowait(THIS_MODULE, FW_ACTION_HOTPLUG,
cur_fw_name, priv->hotplug_device,
priv, sd_request_fw_callback)) < 0)
#endif
PRINTM(FATAL,
"BT: request_firmware_nowait() failed, error code = %#x\n",
ret);
} else {
if ((err =
request_firmware(&priv->firmware, cur_fw_name,
priv->hotplug_device)) < 0) {
PRINTM(FATAL, "BT: request_firmware() failed, error code = %#x\n",
err);
ret = BT_STATUS_FAILURE;
} else
ret = sd_request_fw_dpc(priv->firmware, priv);
}
LEAVE();
return ret;
}
这个结束了,probe也就结束了。
刚才好几个地方调用了wakeup一个waitQ,这个实际上也是probe时创建的一个线程,然后sk_buff都是通过这个线程来执行的,这个函数为:
/**
* @brief This function handles the major job in bluetooth driver.
* it handles the event generated by firmware, rx data received
* from firmware and tx data sent from kernel.
*
* @param data A pointer to bt_thread structure
* @return BT_STATUS_SUCCESS
*/
static int
bt_service_main_thread(void *data)
{
bt_thread *thread = data;
bt_private *priv = thread->priv;
bt_adapter *Adapter = priv->adapter;
wait_queue_t wait;
u8 ireg = 0;
struct sk_buff *skb;
ENTER();
bt_activate_thread(thread); // set field pid
init_waitqueue_entry(&wait, current); // 初始化要等待的队列wait
current->flags |= PF_NOFREEZE;
for (;;) {
add_wait_queue(&thread->waitQ, &wait); // 添加wait到等待队列waitQ中
OS_SET_THREAD_STATE(TASK_INTERRUPTIBLE);
if (priv->adapter->WakeupTries ||
((!priv->adapter->IntCounter) &&
(!priv->bt_dev.tx_dnld_rdy ||
skb_queue_empty(&priv->adapter->tx_queue)))) {
PRINTM(INFO, "Main: Thread sleeping...\n");
schedule(); // 睡眠,代码中wake_up_interruptable()函数来唤醒,这是才会继续向下执行
}
OS_SET_THREAD_STATE(TASK_RUNNING); // 设置任务已经运行标志
remove_wait_queue(&thread->waitQ, &wait); // 清楚等待队列链表节点
if (kthread_should_stop() || Adapter->SurpriseRemoved) {
PRINTM(INFO, "main-thread: break from main thread: "
"SurpriseRemoved=0x%x\n", Adapter->SurpriseRemoved);
break;
}
PRINTM(INFO, "Main: Thread waking up...\n"); // 下面就开始处理数据发送了
if (priv->adapter->IntCounter) {
OS_INT_DISABLE;
Adapter->IntCounter = 0;
OS_INT_RESTORE;
sbi_get_int_status(priv, &ireg);
} else if ((priv->adapter->ps_state == PS_SLEEP) &&
!skb_queue_empty(&priv->adapter->tx_queue)) {
priv->adapter->WakeupTries++;
sbi_wakeup_firmware(priv);
continue;
}
if (priv->adapter->ps_state == PS_SLEEP)
continue;
if (priv->bt_dev.tx_dnld_rdy == TRUE) {
if (!skb_queue_empty(&priv->adapter->tx_queue)) {
skb = skb_dequeue(&priv->adapter->tx_queue); // 摘出要处理的数据
if (skb) {
if (SendSinglePacket(priv, skb)) //这个函数就是发送数据了。
priv->bt_dev.hcidev->stat.err_tx++;
else
priv->bt_dev.hcidev->stat.byte_tx += skb->len;
kfree_skb(skb);
}
}
}
}
bt_deactivate_thread(thread);
LEAVE();
return BT_STATUS_SUCCESS;
}
这里最重要的函数就是SendSinglePacket了
/** @brief This function processes a single packet
*
* @param priv A pointer to bt_private structure
* @param skb A pointer to skb which includes TX packet
* @return BT_STATUS_SUCCESS or BT_STATUS_FAILURE
*/
static int
SendSinglePacket(bt_private * priv, struct sk_buff *skb)
{
int ret;
ENTER();
if (!skb || !skb->data)
return BT_STATUS_FAILURE;
if (!skb->len || ((skb->len + BT_HEADER_LEN) > BT_UPLD_SIZE)) {
PRINTM(ERROR, "Tx Error: Bad skb length %d : %d\n", skb->len,
BT_UPLD_SIZE);
return BT_STATUS_FAILURE;
}
/* This is SDIO specific header length: byte[3][2][1], type: byte[0]
(HCI_COMMAND = 1, ACL_DATA = 2, SCO_DATA = 3, 0xFE = Vendor) */
skb_push(skb, BT_HEADER_LEN);
skb->data[0] = (skb->len & 0x0000ff);
skb->data[1] = (skb->len & 0x00ff00) >> 8;
skb->data[2] = (skb->len & 0xff0000) >> 16;
skb->data[3] = bt_cb(skb)->pkt_type;
if (bt_cb(skb)->pkt_type == MRVL_VENDOR_PKT)
PRINTM(CMD, "DNLD_CMD: ocf_ogf=0x%x len=%d\n",
*((u16 *) & skb->data[4]), skb->len);
ret = sbi_host_to_card(priv, skb->data, skb->len);
LEAVE();
return ret;
}这个函数调用了skb_push函数,此函数会对data这个字段进行处理,linux里面代码说明为add data to the start of a buffer,它会将data指针前移4个字节,然后len字段增加4。
最后就是调用在bt_sdiommc.c文件中sbi_host_to_card函数了,这个函数会调用linux提供的sdio方面(sdio_io.c)的接口函数sdio_writesb,通过dma的方式真正发送数据。
下面我们讲解一个扫描的例子吧(这个例子虽然简单但是也是花了好几个小时才得以理解):
首先在linux上扫描有哪些蓝牙设备,linux为我们提供了一个命令叫hcitool,我们直接调用
# hcitool scan // 首先得把蓝牙设备up起来,如下:
# hciconfig hci0 up
# hciconfig hci0 piscan //即可发现又可连接
#hciconfig -a //查看是否OK
下面我们看下hcitool执行的大致过程如下:
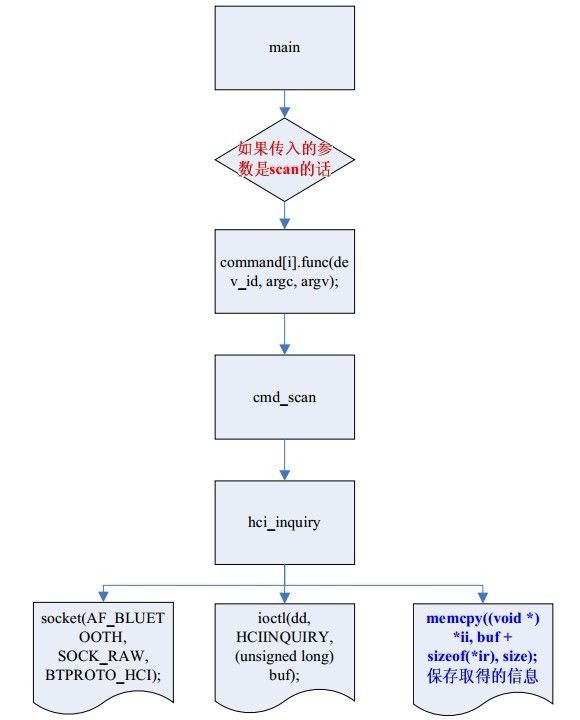
我们看到了linux用户和内核经常使用的ioctl接口函数,然后跟踪下代码发现此ioctl世纪上是在hci_sock.c(用户接口层)这个重要代码中,如下所示,提供了一系列的接口函数
static const struct proto_ops hci_sock_ops = {
.family = PF_BLUETOOTH,
.owner = THIS_MODULE,
.release = hci_sock_release,
.bind = hci_sock_bind,
.getname = hci_sock_getname,
.sendmsg = hci_sock_sendmsg,
.recvmsg = hci_sock_recvmsg,
.ioctl = hci_sock_ioctl,
.poll = datagram_poll,
.listen = sock_no_listen,
.shutdown = sock_no_shutdown,
.setsockopt = hci_sock_setsockopt,
.getsockopt = hci_sock_getsockopt,
.connect = sock_no_connect,
.socketpair = sock_no_socketpair,
.accept = sock_no_accept,
.mmap = sock_no_mmap
};
我们重点关注hci_sock_ioctl这个函数,扫描的CMD上面已经看到是HCIINQUIRY这个参数,代码直接return hci_inquiry(argp);我们继续跟踪,就到了(核心层)hci_core.c代码,如下所示:
int hci_inquiry(void __user *arg)
{
__u8 __user *ptr = arg;
struct hci_inquiry_req ir;
struct hci_dev *hdev;
int err = 0, do_inquiry = 0, max_rsp;
long timeo;
__u8 *buf;
if (copy_from_user(&ir, ptr, sizeof(ir)))
return -EFAULT;
hdev = hci_dev_get(ir.dev_id);
if (!hdev)
return -ENODEV;
hci_dev_lock_bh(hdev);
if (inquiry_cache_age(hdev) > INQUIRY_CACHE_AGE_MAX ||
inquiry_cache_empty(hdev) ||
ir.flags & IREQ_CACHE_FLUSH) {
inquiry_cache_flush(hdev);
do_inquiry = 1;
}
hci_dev_unlock_bh(hdev);
timeo = ir.length * msecs_to_jiffies(2000);
if (do_inquiry) {
err = hci_request(hdev, hci_inq_req, (unsigned long)&ir, timeo); //这个函数就是重点了!!!!!
if (err < 0)
goto done;
}
/* for unlimited number of responses we will use buffer with 255 entries */
max_rsp = (ir.num_rsp == 0) ? 255 : ir.num_rsp;
/* cache_dump can't sleep. Therefore we allocate temp buffer and then
* copy it to the user space.
*/
buf = kmalloc(sizeof(struct inquiry_info) * max_rsp, GFP_KERNEL);
if (!buf) {
err = -ENOMEM;
goto done;
}
hci_dev_lock_bh(hdev);
ir.num_rsp = inquiry_cache_dump(hdev, max_rsp, buf);
hci_dev_unlock_bh(hdev);
BT_DBG("num_rsp %d", ir.num_rsp);
if (!copy_to_user(ptr, &ir, sizeof(ir))) {
ptr += sizeof(ir);
if (copy_to_user(ptr, buf, sizeof(struct inquiry_info) *
ir.num_rsp))
err = -EFAULT;
} else
err = -EFAULT;
kfree(buf);
done:
hci_dev_put(hdev);
return err;
}
上面代码中加了很多“!”的就是真正的扫描函数了hci_request,
他实际上注册了一个回调函数
hci_inq_req,然后主函数等待这个回调函数返回从而结束请求!
这个回调函数实现如下:
static void hci_inq_req(struct hci_dev *hdev, unsigned long opt)
{
struct hci_inquiry_req *ir = (struct hci_inquiry_req *) opt;
struct hci_cp_inquiry cp;
BT_DBG("%s", hdev->name);
if (test_bit(HCI_INQUIRY, &hdev->flags))
return;
/* Start Inquiry */
memcpy(&cp.lap, &ir->lap, 3);
cp.length = ir->length;
cp.num_rsp = ir->num_rsp;
hci_send_cmd(hdev, HCI_OP_INQUIRY, sizeof(cp), &cp);
}
然后就发送command了!
/* Send HCI command */
int hci_send_cmd(struct hci_dev *hdev, __u16 opcode, __u32 plen, void *param)
{
int len = HCI_COMMAND_HDR_SIZE + plen;
struct hci_command_hdr *hdr;
struct sk_buff *skb;
BT_DBG("%s opcode 0x%x plen %d", hdev->name, opcode, plen);
skb = bt_skb_alloc(len, GFP_ATOMIC);
if (!skb) {
BT_ERR("%s no memory for command", hdev->name);
return -ENOMEM;
}
hdr = (struct hci_command_hdr *) skb_put(skb, HCI_COMMAND_HDR_SIZE);
hdr->opcode = cpu_to_le16(opcode);
hdr->plen = plen;
if (plen)
memcpy(skb_put(skb, plen), param, plen);
BT_DBG("skb len %d", skb->len);
bt_cb(skb)->pkt_type = HCI_COMMAND_PKT;
skb->dev = (void *) hdev;
if (test_bit(HCI_INIT, &hdev->flags))
hdev->init_last_cmd = opcode;
skb_queue_tail(&hdev->cmd_q, skb);
tasklet_schedule(&hdev->cmd_task);
return 0;
}
这个函数先分配了sk_buff结构体的空间,然后检查command的类型,是cmd_taskor rx_taskor tx_task,检查发现这个cmd就是cmd_task,那么就触发tasklet我的数据来临了,请随时准备好要工作了,那么linux就马不停蹄的在最快的时间内来触发他工作,因为tasklet是在linux里面比较优先的了,当然如果想更快还有带优先级的!好了,下面就到tasklet_init注册的函数了,这几个init注册函数在hci_register_dev注册了,这个函数前面在probe bt device时已经注册过了,这里不全截了,如下:
tasklet_init(&hdev->cmd_task, hci_cmd_task, (unsigned long) hdev); tasklet_init(&hdev->rx_task, hci_rx_task, (unsigned long) hdev); tasklet_init(&hdev->tx_task, hci_tx_task, (unsigned long) hdev);这里我们暂时关心的是hci_cmd_task函数,如下:
static void hci_cmd_task(unsigned long arg)
{
struct hci_dev *hdev = (struct hci_dev *) arg;
struct sk_buff *skb;
BT_DBG("%s cmd %d", hdev->name, atomic_read(&hdev->cmd_cnt));
/* Send queued commands */
if (atomic_read(&hdev->cmd_cnt)) {
skb = skb_dequeue(&hdev->cmd_q);
if (!skb)
return;
kfree_skb(hdev->sent_cmd);
hdev->sent_cmd = skb_clone(skb, GFP_ATOMIC);
if (hdev->sent_cmd) {
atomic_dec(&hdev->cmd_cnt);
hci_send_frame(skb);
if (test_bit(HCI_RESET, &hdev->flags))
del_timer(&hdev->cmd_timer);
else
mod_timer(&hdev->cmd_timer,
jiffies + msecs_to_jiffies(HCI_CMD_TIMEOUT));
} else {
skb_queue_head(&hdev->cmd_q, skb);
tasklet_schedule(&hdev->cmd_task);
}
}
}
这里面涉及很多链表操作,需要先熟悉下更好,处理前先把这个skb从链表中删除了,然后调用了hci_send_frame这个函数,如下:
static int hci_send_frame(struct sk_buff *skb)
{
struct hci_dev *hdev = (struct hci_dev *) skb->dev;
if (!hdev) {
kfree_skb(skb);
return -ENODEV;
}
BT_DBG("%s type %d len %d", hdev->name, bt_cb(skb)->pkt_type, skb->len);
if (atomic_read(&hdev->promisc)) {
/* Time stamp */
__net_timestamp(skb);
hci_send_to_sock(hdev, skb, NULL);
}
/* Get rid of skb owner, prior to sending to the driver. */
skb_orphan(skb);
return hdev->send(skb);
}
我们看到最后一行是个函数指针,调用了hci_dev下的send函数指针,到这里代码都在hci_core.c中,所以其实这些都是用户接口与驱动接口打交道的桥梁,也就成为核心层了。然后这个函数指针前面已经写过了,其实就是调用的是bt_main.c的bt_send_frame函数了,这个函数再次判断这个pkt_type是什么,是HCI_COMMAND_PKT还是HCI_ACLDATA_PKT还是HCI_SCODATA_PKT,然后插入链表尾部,再唤醒上文提到的工作队列wake_up_interruptible(&priv->MainThread.waitQ);就这个函数了,经过辗转反侧又回到了这个工作队列,也就是上文中的bt_service_main_thread函数了。同样在这个函数里面先把这个skb从链表中取出并unlink掉,然后再调用SendSinglePacket,这个函数前面已经提到,我的是sdio模块,所以不同芯片都会有差异了,如下:
/** @brief This function processes a single packet
*
* @param priv A pointer to bt_private structure
* @param skb A pointer to skb which includes TX packet
* @return BT_STATUS_SUCCESS or BT_STATUS_FAILURE
*/
static int
SendSinglePacket(bt_private * priv, struct sk_buff *skb)
{
int ret;
ENTER();
if (!skb || !skb->data)
return BT_STATUS_FAILURE;
if (!skb->len || ((skb->len + BT_HEADER_LEN) > BT_UPLD_SIZE)) {
PRINTM(ERROR, "Tx Error: Bad skb length %d : %d\n", skb->len,
BT_UPLD_SIZE);
return BT_STATUS_FAILURE;
}
/* This is SDIO specific header length: byte[3][2][1], type: byte[0]
(HCI_COMMAND = 1, ACL_DATA = 2, SCO_DATA = 3, 0xFE = Vendor) */
skb_push(skb, BT_HEADER_LEN);
skb->data[0] = (skb->len & 0x0000ff);
skb->data[1] = (skb->len & 0x00ff00) >> 8;
skb->data[2] = (skb->len & 0xff0000) >> 16;
skb->data[3] = bt_cb(skb)->pkt_type;
if (bt_cb(skb)->pkt_type == MRVL_VENDOR_PKT)
PRINTM(CMD, "DNLD_CMD: ocf_ogf=0x%x len=%d\n",
*((u16 *) & skb->data[4]), skb->len);
ret = sbi_host_to_card(priv, skb->data, skb->len);
LEAVE();
return ret;
}
先加sdio头,然后再调用sbi_host_to_card函数,如下:
/**
* @brief This function sends data to the card.
*
* @param priv A pointer to bt_private structure
* @param payload A pointer to the data/cmd buffer
* @param nb Length of data/cmd
* @return BT_STATUS_SUCCESS or BT_STATUS_FAILURE
*/
int
sbi_host_to_card(bt_private * priv, u8 * payload, u16 nb)
{
struct sdio_mmc_card *card = priv->bt_dev.card;
int ret = BT_STATUS_SUCCESS;
int buf_block_len;
int blksz;
int i = 0;
u8 *buf = NULL;
struct hci_dev *hdev = priv->bt_dev.hcidev;
void *tmpbuf = NULL;
int tmpbufsz;
ENTER();
if (!card || !card->func) {
PRINTM(ERROR, "BT: card or function is NULL!\n");
LEAVE();
return BT_STATUS_FAILURE;
}
buf = payload;
/* Allocate buffer and copy payload */
blksz = SD_BLOCK_SIZE;
buf_block_len = (nb + blksz - 1) / blksz;
if ((u32) payload & (DMA_ALIGNMENT - 1)) {
tmpbufsz = buf_block_len * blksz + DMA_ALIGNMENT;
tmpbuf = kmalloc(tmpbufsz, GFP_KERNEL);
memset(tmpbuf, 0, tmpbufsz);
/* Ensure 8-byte aligned CMD buffer */
buf = (u8 *) ALIGN_ADDR(tmpbuf, DMA_ALIGNMENT);
memcpy(buf, payload, nb);
}
sdio_claim_host(card->func);
#define MAX_WRITE_IOMEM_RETRY 2
do {
/* Transfer data to card */
ret = sdio_writesb(card->func, priv->bt_dev.ioport, buf,
buf_block_len * blksz);
if (ret < 0) {
i++;
PRINTM(ERROR, "BT: host_to_card, write iomem (%d) failed: %d\n", i,
ret);
sdio_writeb(card->func, HOST_WO_CMD53_FINISH_HOST,
CONFIGURATION_REG, &ret);
udelay(20);
ret = BT_STATUS_FAILURE;
if (i > MAX_WRITE_IOMEM_RETRY)
goto exit;
} else {
DBG_HEXDUMP(DAT_D, "BT: SDIO Blk Wr", payload, nb);
PRINTM(DATA, "BT: SDIO Blk Wr %s: len=%d\n", hdev->name, nb);
}
} while (ret == BT_STATUS_FAILURE);
priv->bt_dev.tx_dnld_rdy = FALSE; // 此时禁止了再次来数据!这个函数和sbi_get_int_status(priv, &ireg);这个函数呼应
exit:
sdio_release_host(card->func);
if (tmpbuf)
kfree(tmpbuf);
LEAVE();
return ret;
}
前面一直忽略了sbi_get_int_status(priv, &ireg);这个函数,而经过跟踪发现了我一直未找到的一个数据流动问题,只看到了从kernel向card发送数据,却一直没有看到kernel从card读数据!原来如下:
/**
* @brief This function checks the interrupt status and handle it accordingly.
*
* @param priv A pointer to bt_private structure
* @param ireg A pointer to variable that keeps returned value
* @return BT_STATUS_SUCCESS
*/
int
sbi_get_int_status(bt_private * priv, u8 * ireg)
{
int ret = BT_STATUS_SUCCESS;
u8 sdio_ireg = 0;
struct sdio_mmc_card *card = priv->bt_dev.card;
struct hci_dev *hdev = priv->bt_dev.hcidev;
ENTER();
*ireg = 0;
OS_INT_DISABLE;
sdio_ireg = priv->adapter->sd_ireg;
priv->adapter->sd_ireg = 0;
OS_INT_RESTORE;
sdio_claim_host(card->func);
PRINTM(INTR, "BT: get_int_status %s: sdio_ireg=0x%x\n", hdev->name,
sdio_ireg);
priv->adapter->irq_done = sdio_ireg;
if (sdio_ireg & DN_LD_HOST_INT_STATUS) { /* tx_done INT 这里判断是否是下载模式 */
if (priv->bt_dev.tx_dnld_rdy) { /* tx_done already received */
PRINTM(INFO,
"BT: warning: tx_done already received: tx_dnld_rdy=0x%x int status=0x%x\n",
priv->bt_dev.tx_dnld_rdy, sdio_ireg);
} else {
priv->bt_dev.tx_dnld_rdy = TRUE;
}
}
if (sdio_ireg & UP_LD_HOST_INT_STATUS)
sd_card_to_host(priv); //这里根据中断返回的状态这里判断是否是上传模式!
*ireg = sdio_ireg;
ret = BT_STATUS_SUCCESS;
sdio_release_host(card->func);
LEAVE();
return ret;
}
记住从kernel发送数据到card为:sbi_host_to_card
而kernel从card读数据为:sd_card_to_host
暂时而言scan过程就结束了,但是还很多具体数据内容未去分析,以及数据的返回过程都没有去分析,下面将着重去根据协议分析数据内容!见谅!
今天再次根据printk信息看到了中断的发生情况,中断处理函数为sd_interrupt,这个函数会读中断状态寄存器HOST_INTSTATUS_REG(0x03)假设这个中断状态寄存器的内容为1的话,sbi_get_int_status这个函数中将进行判断,从而认为card要上传数据,假设内容为2的话,则是kernel要发送数据!
/**
* @brief This function handles the interrupt.
*
* @param func A pointer to sdio_func structure
* @return N/A
*/
static void
sd_interrupt(struct sdio_func *func)
{
bt_private *priv;
struct hci_dev *hcidev;
struct sdio_mmc_card *card;
int ret = BT_STATUS_SUCCESS;
u8 ireg = 0;
ENTER();
card = sdio_get_drvdata(func);
if (!card || !card->priv) {
PRINTM(INFO,
"BT: %s: sbi_interrupt(%p) card or priv is NULL, card=%p\n",
__FUNCTION__, func, card);
LEAVE();
return;
}
priv = card->priv;
hcidev = priv->bt_dev.hcidev;
ireg = sdio_readb(card->func, HOST_INTSTATUS_REG, &ret);
if (ret) {
PRINTM(WARN, "BT: sdio_read_ioreg: read int status register failed\n");
goto done;
}
if (ireg != 0) {
/*
* DN_LD_HOST_INT_STATUS and/or UP_LD_HOST_INT_STATUS
* Clear the interrupt status register and re-enable the interrupt
*/
PRINTM(INTR, "BT: INT %s: sdio_ireg = 0x%x\n", hcidev->name, ireg);
priv->adapter->irq_recv = ireg;
} else {
PRINTM(ERROR, "BT: ERR: ireg=0\n");
}
OS_INT_DISABLE;
priv->adapter->sd_ireg |= ireg;
OS_INT_RESTORE;
bt_interrupt(hcidev); // 这里这个函数调用了wake_up(...)
done:
LEAVE();
}在设定各种状态后调用了wake_up来唤醒等待队列,如下:
/**
* @brief This function handles the interrupt. it will change PS
* state if applicable. it will wake up main_thread to handle
* the interrupt event as well.
*
* @param hdev A pointer to hci_dev structure
* @return N/A
*/
void
bt_interrupt(struct hci_dev *hdev)
{
bt_private *priv = (bt_private *) hdev->driver_data;
ENTER();
PRINTM(INTR, "****interrupt****\n");
priv->adapter->ps_state = PS_AWAKE;
if (priv->adapter->hs_state == HS_ACTIVATED) {
PRINTM(CMD, "BT: %s: HS DEACTIVATED in ISR!\n", hdev->name);
priv->adapter->hs_state = HS_DEACTIVATED;
}
priv->adapter->WakeupTries = 0;
priv->adapter->IntCounter++;
wake_up_interruptible(&priv->MainThread.waitQ);
LEAVE();
}