U-Boot启动引导内核分析
U-Boot启动引导内核分析(一)
标签:ARM bootloader U-Boot 代码分析 抵岸科技
U-Boot启动流程
大多数bootloader都分为stage1和stage2两大部分,u-boot也不例外。依赖于CPU体系结构的代码(如设备初始化代码等) 通常都放在stage1,且可以用汇编语言来实现,而stage2则通常用C语言来实现,这样可以实现复杂的功能,而且有更好的可读性和移植性。
u-boot启动大致流程如图1所示: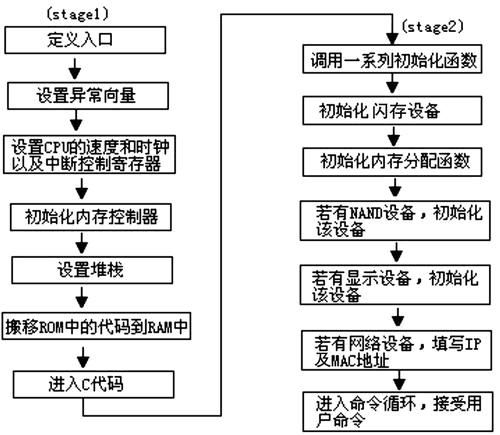
图 1
> Stage1
在flash中执行的引导代码,也就是bootloader中的stage1,负责初始化硬件环境,把u-boot从flash加载到RAM中去,然后跳到lib_arm/board.c中的start_armboot中去执行。
u-boot的stage1代码通常放在start.s文件中,它用汇编语言写成,其主要代码部分如下:
1) 定义入口由于一个可执行的Image必须有一个入口点,并且只能有一个全局入口,通常这个入口放在ROM(Flash) 的0x0地址,因此,必须通知编译器以使其知道这个入口,该工作可通过修改连接器脚本来完成。
2) 设置异常向量(Exception Vector) 。
3) 设置CPU的速度、时钟频率及中断控制寄存器。
4) 初始化内存控制器
5) 将ROM中的程序复制到RAM中。
6) 初始化堆栈
7) 转到RAM中执行,该工作可使用指令ldr pc, _start_armboot来完成。
> Stage2
lib_arm/board.c中的start_armboot是C语言开始的函数,也是整个启动代码中C语言的主函数,同时还是整个u-boot(armboot) 的主函数,该函数主要流程分析如下:
{
init_fnc_t **init_fnc_ptr;
char *s;
#if !defined(CFG_NO_FLASH) || defined (CONFIG_VFD) || defined(CONFIG_LCD)
ulong size;
#endif
#if defined(CONFIG_VFD) || defined(CONFIG_LCD)
unsigned long addr;
#endif
/* Pointer is writable since we allocated a register for it */
/* 给全局数据变量gd安排空间 */
gd = (gd_t*)(_armboot_start - CFG_MALLOC_LEN - sizeof(gd_t));
/* compiler optimization barrier needed for GCC >= 3.4 */
__asm__ __volatile__("": : :"memory");
/* 给板子数据变量gd->bd安排空间 */
memset ((void*)gd, 0, sizeof (gd_t));
gd->bd = (bd_t*)((char*)gd - sizeof(bd_t));
memset (gd->bd, 0, sizeof (bd_t));
monitor_flash_len = _bss_start - _armboot_start;
/* 顺序执行init_sequence数组中的初始化函数 */
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
if ((*init_fnc_ptr)() != 0) {
hang ();
}
}
/*初始化函数列表:
init_fnc_t *init_sequence[] = {
cpu_init, /* basic cpu dependent setup */
#if defined(CONFIG_SKIP_RELOCATE_UBOOT)
reloc_init, /* Set the relocation done flag, must
do this AFTER cpu_init(), but as soon
as possible */
#endif
board_init, /* basic board dependent setup */
interrupt_init, /* set up exceptions */
env_init, /* initialize environment */
init_baudrate, /* initialze baudrate settings */
serial_init, /* serial communications setup */
console_init_f, /* stage 1 init of console */
display_banner, /* say that we are here */
#if defined(CONFIG_HW_WATCHDOG)
hw_watchdog_init, /* watchdog setup */
#endif
#if defined(CONFIG_DISPLAY_CPUINFO)
print_cpuinfo, /* display cpu info (and speed) */
#endif
#if defined(CONFIG_DISPLAY_BOARDINFO)
checkboard, /* display board info */
#endif
#if defined(CONFIG_HARD_I2C) || defined(CONFIG_SOFT_I2C)
init_func_i2c,
#endif
dram_init, /* configure available RAM banks */
display_dram_config,
NULL,
};
*/
/* armboot_start is defined in the board-specific linker script */
mem_malloc_init (_armboot_start - CFG_MALLOC_LEN);
#if defined(CONFIG_CMD_NAND)
puts ("NAND: ");
/* NAND FLASH初始化 */
nand_init(); /* go init the NAND */
#endif
/* 重新定位环境变量 */
env_relocate ();
#ifdef CONFIG_VFD
/* must do this after the framebuffer is allocated */
drv_vfd_init();
#endif /* CONFIG_VFD */
#ifdef CONFIG_SERIAL_MULTI
/* 串口初始化 */
serial_initialize();
#endif
/* 从环境变量中获取IP地址和MAC地址 */
gd->bd->bi_ip_addr = getenv_IPaddr ("ipaddr");
/* MAC Address */
{
int i;
ulong reg;
char *s, *e;
char tmp[64];
i = getenv_r ("ethaddr", tmp, sizeof (tmp));
s = (i > 0) ? tmp : NULL;
for (reg = 0; reg < 6; ++reg) {
gd->bd->bi_enetaddr[reg] = s ? simple_strtoul (s, &e, 16) : 0;
if (s)
s = (*e) ? e + 1 : e;
}
#ifdef CONFIG_HAS_ETH1
i = getenv_r ("eth1addr", tmp, sizeof (tmp));
s = (i > 0) ? tmp : NULL;
for (reg = 0; reg < 6; ++reg) {
gd->bd->bi_enet1addr[reg] = s ? simple_strtoul (s, &e, 16) : 0;
if (s)
s = (*e) ? e + 1 : e;
}
#endif
}
devices_init (); /* get the devices list going. */
#ifdef CONFIG_CMC_PU2
load_sernum_ethaddr ();
#endif /* CONFIG_CMC_PU2 */
/* 跳转表的初始化*/
jumptable_init ();
/* 控制台的初始化 */
console_init_r (); /* fully init console as a device */
/* IRQ中断使能 */
enable_interrupts ();
/* 各种型号网络设备的初始化 */
#ifdef CONFIG_DRIVER_TI_EMAC
extern void dm644x_eth_set_mac_addr (const u_int8_t *addr);
if (getenv ("ethaddr")) {
dm644x_eth_set_mac_addr(gd->bd->bi_enetaddr);
}
#endif
#ifdef CONFIG_DRIVER_CS8900
cs8900_get_enetaddr (gd->bd->bi_enetaddr);
#endif
/* 通过环境变量初始化load_addr
默认定义ulong load_addr = CFG_LOAD_ADDR; */
if ((s = getenv ("loadaddr")) != NULL) {
load_addr = simple_strtoul (s, NULL, 16);
}
/* */
#if defined(CONFIG_CMD_NET)
if ((s = getenv ("bootfile")) != NULL) {
copy_filename (BootFile, s, sizeof (BootFile));
}
#endif
#ifdef BOARD_LATE_INIT
board_late_init ();
#endif
#if defined(CONFIG_CMD_NET)
#if defined(CONFIG_NET_MULTI)
puts ("Net: ");
#endif
eth_initialize(gd->bd);
#if defined(CONFIG_RESET_PHY_R)
debug ("Reset Ethernet PHY/n");
reset_phy();
#endif
#endif
/* 循环不断地执行main_loop ()函数
main_loop ()主要处理用户命令 */
for (;;) {
main_loop ();
}
}
整个u-boot的执行就进入等待用户输入命令,解析并执行命令的死循环中。
U-Boot启动引导内核分析(二)
标签:ARM bootloader U-Boot 代码分析 抵岸科技
也许细心的你会问:我在用UBoot的时候并没有直接进入用户命令界面呀,而是在倒计时结束后自动引导kernel。这是怎么回事呢?
在 main_loop()函数当中有如下一段代码:
•
•
•
s = getenv ("bootcmd");
/*获取bootcmd 的内容*/
/*bootcmd=nand read 0x22000000 0xB0000 0x200000; bootm */
•
•
# ifndef CFG_HUSH_PARSER
run_command (s, 0);
/*运行s包含的命令*/
/*运行nand read 0x22000000 0xB0000 0x200000表示将NANDFLASH
0xB0000处数据读取放于0x22000000处,读取长度为0x200000
*/
/*运行bootm命令,引导内核启动*/
# else
parse_string_outer(s, FLAG_PARSE_SEMICOLON |
FLAG_EXIT_FROM_LOOP);
# endif
•
•
•
#endif /* CONFIG_BOOTDELAY */
bootm命令是什么?它是怎样引导内核的?
要知道想解决这个问题,就要分析common/cmd_bootm.c中的函数do_bootm,因为引导kernel就是bootm这条命令的工作,do_bootm是命令bootm的执行函数。
现在我们来分析一下common/cmd_bootm.c中的函数do_bootm,这是bootm命令的处理函数。
{
ulong iflag;
const char *type_name;
uint unc_len = CFG_BOOTM_LEN;
uint8_t comp, type, os;
void *os_hdr;
ulong os_data, os_len;
ulong image_start, image_end;
ulong load_start, load_end;
ulong mem_start;
phys_size_t mem_size;
struct lmb lmb;
memset ((void *)&images, 0, sizeof (images));
images.verify = getenv_yesno ("verify");
images.lmb = &lmb;
lmb_init(&lmb);
mem_start = getenv_bootm_low();
mem_size = getenv_bootm_size();
lmb_add(&lmb, (phys_addr_t)mem_start, mem_size);
board_lmb_reserve(&lmb);
/* get kernel image header, start address and length */
/* 获取内核镜像头信息 */
/* 打印 “## Booting kernel from Legacy Image at 22000000 ...
Image Name: Linux-2.6.30
Image Type: ARM Linux Kernel Image (uncompressed)
Data Size: 1507760 Bytes = 1.4 MB
Load Address: 20008000
Entry Point: 20008000
Verifying Checksum ... OK”*/
os_hdr = boot_get_kernel (cmdtp, flag, argc, argv,
&images, &os_data, &os_len);
if (os_len == 0) {
puts ("ERROR: can't get kernel image!/n");
return 1;
}
/* get image parameters */
/* 获取内核镜像格式 */
switch (genimg_get_format (os_hdr)) {
case IMAGE_FORMAT_LEGACY:
/* 获取内核镜像参数 */
type = image_get_type (os_hdr);
comp = image_get_comp (os_hdr);
os = image_get_os (os_hdr);
image_end = image_get_image_end (os_hdr);
load_start = image_get_load (os_hdr);
break;
}
image_start = (ulong)os_hdr;
load_end = 0;
type_name = genimg_get_type_name (type);
/* 禁止所有中断 */
iflag = disable_interrupts();
#ifdef CONFIG_AMIGAONEG3SE
/*
* We've possible left the caches enabled during
* bios emulation, so turn them off again
*/
icache_disable();
invalidate_l1_instruction_cache();
flush_data_cache();
dcache_disable();
#endif
switch (comp) {
case IH_COMP_NONE:
/* 加载内核镜像 */
/* 打印“Loading Kernel Image ... OK” */
if (load_start == (ulong)os_hdr) {
printf (" XIP %s ... ", type_name);
} else {
printf (" Loading %s ... ", type_name);
memmove_wd ((void *)load_start,
(void *)os_data, os_len, CHUNKSZ);
}
load_end = load_start + os_len;
puts("OK/n");
break;
}
puts ("OK/n");
debug (" kernel loaded at 0x%08lx, end = 0x%08lx/n", load_start, load_end);
show_boot_progress (7);
/* 加载错误 */
if ((load_start < image_end) && (load_end > image_start)) {
debug ("image_start = 0x%lX, image_end = 0x%lx/n", image_start, image_end);
debug ("load_start = 0x%lx, load_end = 0x%lx/n", load_start, load_end);
if (images.legacy_hdr_valid) {
if (image_get_type (&images.legacy_hdr_os_copy) == IH_TYPE_MULTI)
puts ("WARNING: legacy format multi component "
"image overwritten/n");
} else {
puts ("ERROR: new format image overwritten - "
"must RESET the board to recover/n");
show_boot_progress (-113);
do_reset (cmdtp, flag, argc, argv);
}
}
show_boot_progress (8);
lmb_reserve(&lmb, load_start, (load_end - load_start));
switch (os) {
default: /* handled by (original) Linux case */
case IH_OS_LINUX:
#ifdef CONFIG_SILENT_CONSOLE
fixup_silent_linux();
#endif
/* 引导内核启动函数 */
do_bootm_linux (cmdtp, flag, argc, argv, &images);
break;
}
show_boot_progress (-9);
#ifdef DEBUG
puts ("/n## Control returned to monitor - resetting.../n");
do_reset (cmdtp, flag, argc, argv);
#endif
if (iflag)
enable_interrupts();
return 1;
}
至此do_bootm函数完成引导内核前的准备任务了。引导内核启动函数将由do_bootm_linux()函数执行。
U-Boot启动引导内核分析(三)
标签:ARM bootloader U-Boot 代码分析 抵岸科技
do_bootm_linux()函数位于lib_arm/Bootm.c文件中,主要流程分析如下:
bootm_headers_t *images)
{
ulong initrd_start, initrd_end;
ulong ep = 0;
bd_t *bd = gd->bd;
char *s;
int machid = bd->bi_arch_number;
void (*theKernel)(int zero, int arch, uint params);
int ret;
#ifdef CONFIG_CMDLINE_TAG
char *commandline = getenv ("bootargs");
#endif
/* find kernel entry point */
if (images->legacy_hdr_valid) {
ep = image_get_ep (&images->legacy_hdr_os_copy);
#if defined(CONFIG_FIT)
} else if (images->fit_uname_os) {
ret = fit_image_get_entry (images->fit_hdr_os,
images->fit_noffset_os, &ep);
if (ret) {
puts ("Can't get entry point property!/n");
goto error;
}
#endif
} else {
puts ("Could not find kernel entry point!/n");
goto error;
}
theKernel = (void (*)(int, int, uint))ep;
s = getenv ("machid");
if (s) {
machid = simple_strtoul (s, NULL, 16);
printf ("Using machid 0x%x from environment/n", machid);
}
ret = boot_get_ramdisk (argc, argv, images, IH_ARCH_ARM,
&initrd_start, &initrd_end);
if (ret)
goto error;
show_boot_progress (15);
debug ("## Transferring control to Linux (at address %08lx) .../n",
(ulong) theKernel);
#if defined (CONFIG_SETUP_MEMORY_TAGS) || /
defined (CONFIG_CMDLINE_TAG) || /
defined (CONFIG_INITRD_TAG) || /
defined (CONFIG_SERIAL_TAG) || /
defined (CONFIG_REVISION_TAG) || /
defined (CONFIG_LCD) || /
defined (CONFIG_VFD)
/* 初始化TAG结构体开始 */
setup_start_tag (bd);
#ifdef CONFIG_SERIAL_TAG
setup_serial_tag (¶ms);
#endif
#ifdef CONFIG_REVISION_TAG
setup_revision_tag (¶ms);
#endif
#ifdef CONFIG_SETUP_MEMORY_TAGS
/* 设置RAM参数 */
setup_memory_tags (bd);
#endif
#ifdef CONFIG_CMDLINE_TAG
setup_commandline_tag (bd, commandline);
#endif
#ifdef CONFIG_INITRD_TAG
if (initrd_start && initrd_end)
setup_initrd_tag (bd, initrd_start, initrd_end);
#endif
#if defined (CONFIG_VFD) || defined (CONFIG_LCD)
setup_videolfb_tag ((gd_t *) gd);
#endif
/* 初始化TAG结构体结束 */
setup_end_tag (bd);
#endif
/* we assume that the kernel is in place */
printf ("/nStarting kernel .../n/n");
#ifdef CONFIG_USB_DEVICE
{
extern void udc_disconnect (void);
udc_disconnect ();
}
#endif
cleanup_before_linux ();
/* 将控制权交给内核,让内核自解压启动 */
/* 传给KERNEL的参数:(struct tag *)bd->bi_boot_params */
/* 在board/atmel/at91sam9g20ek/At91sam9g20ek.c文件中有如下定义:
gd->bd->bi_boot_params = PHYS_SDRAM + 0x100;(PHYS_SDRAM = 0x20000000)
*/
theKernel (0, machid, bd->bi_boot_params);
/* does not return */
return;
error:
do_reset (cmdtp, flag, argc, argv);
return;
}
文件历史记录
版本 编制 日期 更改内容
-----------------------------------------------------------------------------------
V1.0 抵岸科技 2010-7-20 首发