Exynos4412 裸机开发—— 流水灯
这里我们使用的开发板是4412,开发板4412上有4个LED灯,我们这里可以利用其来做流水灯实验。下面是4个LED的原理图:
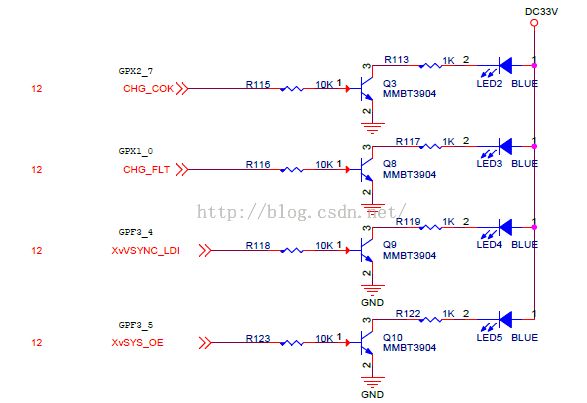
查看原理图,4412开发板的LED由CPX2_7 CPX1_0 GPF3_4 GPF3_5 四个寄存器来控制,观察电路图,我们需要在IO 口输出高电平才能使LED点亮。
一、利用汇编编写程序
以GPX2为例,通过修改GPX2CON、GPX2DAT 的值来控制LED的亮灭
1、GPX2CON
其地址为0x11000C40:

GPX2CON可以控制8个IO口,LED2是由GPX2_7控制的,所以我们只要设置GPX2CON[7]即可

可以看到该4个bit 为0x1 时IO口为输出功能,则我们可以这样设置:
LDR R0,=0x11000C40 LDR R1,[R0] BIC R1,R1,#0xf0000000 ORR R1,R1,#0x10000000 STR R1,[R0]
现将[31:28]位清零再置一,则该端口被设置为输出引脚,而至于输出高电平还是低电平,则由GPX2DAT来控制。
2、 GPX2DAT
其地址为0x110000C44
GPX2DAT低8位有效,每1个bit控制一个端口输出电平的高低,该位置1,则输出高电平,置0,则输出低电平,为点亮LED,我们可以这样设置:
LDR R0,=0x11000C44 LDR R1,[R0] ORR R1,R1,#0x80 STR R1,[R0]
第[7]位置1即可,此时LED被点亮;
同样,该位置0,则LED熄灭:
LDR R1,[R0] BIC R1,R1,#0x01 STR R1,[R0]
下面是一个完整的汇编程序,实现LED灯的闪烁(这里以LED3为例):
.globl _start .arm _start: LDR R0,=0x11000C20 LDR R1,[R0] BIC R1,R1,#0x0000000f ORR R1,R1,#0x00000001 STR R1,[R0] loop: LDR R0,=0x11000C24 LDR R1,[R0] ORR R1,R1,#0x01 STR R1,[R0] BL delay LDR R1,[R0] BIC R1,R1,#0x01 STR R1,[R0] BL delay B loop delay: LDR R2,=0xfffffff loop1: SUB R2,R2,#0x1 CMP R2,#0x0 BNE loop1 MOV PC,LR .end
其实这里我们可以看到,汇编程序的缺点,就是非常繁琐,而且辨识度差,这段代码,我们看其中一段,根本看不出其实现了什么功能,ARM 裸机程序,我们同样可以用C来编写。
二、用C 实现流水灯
ARM裸机开发中最重要的就是寄存器的控制,我们如何配置寄存器呢?这里以GPX2为例,我们在头文件里定义下面这个结构体:
/* GPX2 */
typedef struct {
unsigned int CON;
unsigned int DAT;
unsigned int PUD;
unsigned int DRV;
}gpx2;
#define GPX2 (* (volatile gpx2 *)0x11000C40 )
这里将GPX2所用到的寄存器放到一个结构体内,我们看这句
#define GPX2 (* (volatile gpx2 *)0x11000C40 )
该宏定义是什么意思呢?将0x11000C40 强转成 gpx2 * 类型的地址,并取出该地址里面的值。 则我们可以直接向GPX2.CON里写入数据,便可控制该寄存器
GPX2.CON = GPX2.CON & (~(0xf0000000)) | (0x10000000)
等价于
LDR R0,=0x11000C40 LDR R1,[R0] BIC R1,R1,#0xf0000000 ORR R1,R1,#0x10000000 STR R1,[R0]
可以看出大大加快了我们的开发效率。
下面是开发实例:
led.c
#include "exynos_4412.h"
#include "led.h"
void led_init(void)
{
GPX2.CON = GPX2.CON & (~(0xf0000000)) | 0x10000000;
GPX1.CON = GPX1.CON & (~(0x0000000f)) | 0x00000001;
GPF3.CON = GPF3.CON & (~(0x000f0000)) | 0x00010000;
GPF3.CON = GPF3.CON & (~(0x00f00000)) | 0x00100000;
}
void led_on(int n)
{
switch(n)
{
case 0:
GPX2.DAT = GPX2.DAT|0x80;
break;
case 1:
GPX1.DAT = GPX1.DAT|0x01;
break;
case 2:
GPF3.DAT = GPF3.DAT|0x10;
break;
case 3:
GPF3.DAT = GPF3.DAT|0x20;
break;
}
}
void led_off(int n)
{
switch(n)
{
case 0:
GPX2.DAT = GPX2.DAT&(~(0x80));
break;
case 1:
GPX1.DAT = GPX1.DAT&(~(0x01));
break;
case 2:
GPF3.DAT = GPF3.DAT&(~(0x10));
break;
case 3:
GPF3.DAT = GPF3.DAT&(~(0x20));
break;
}
}
main.c
#include "exynos_4412.h"
#include "led.h"
void delay_ms(unsigned int num)
{
int i,j;
for(i=num; i>0;i--)
for(j=1000;j>0;j--)
;
}
int main (void)
{
int i = 0;
led_init ();
while (1) {
led_on(i%4);
led_off((i-1+4)%4);
i++;
delay_ms(500);
}
return 0;
}
同时注意的是,这里我们使用的makefile:
#=============================================================================#
CROSS_COMPILE = arm-none-eabi-
NAME =pwm
#CFLAGS += -g -O0 -mabi=apcs-gnu -mfpu=neon -mfloat-abi=softfp -fno-builtin \
# -nostdinc -I ./include -I ./lib
CFLAGS=-mfloat-abi=softfp -mfpu=vfpv3 -mabi=apcs-gnu -fno-builtin -fno-builtin-function -g -O0 -c -I ./include -I ./lib
LD = $(CROSS_COMPILE)ld
CC = $(CROSS_COMPILE)gcc
OBJCOPY = $(CROSS_COMPILE)objcopy
OBJDUMP = $(CROSS_COMPILE)objdump
OBJS=./cpu/start.o ./driver/uart.o ./driver/_modsi3.o ./driver/_divsi3.o \
./driver/_udivsi3.o ./driver/_umodsi3.o main.o ./lib/printf.o
#=============================================================================#
all:clean $(OBJS)
$(LD) $(OBJS) -T map.lds -o $(NAME).elf
$(OBJCOPY) -O binary $(NAME).elf $(NAME).bin
$(OBJDUMP) -D $(NAME).elf > $(NAME).dis
%.o: %.S
$(CC) $(CFLAGS) -c -o $@ $<
%.o: %.s
$(CC) $(CFLAGS) -c -o $@ $<
%.o: %.c
$(CC) $(CFLAGS) -c -o $@ $<
clean:
rm -rf $(OBJS) *.elf *.bin *.dis *.o
#============================================================================#
将生成的led.bin 文件烧入开发板 0x40008000处,使用命令 go 0x40008000,则可看到开发板上的LED闪烁了。