modbus协议(2)
上一篇介绍了modbus协议的基本概念,这一篇主要介绍最近做的一个小项目:STM3210ZET6与昆仑屏(TPC)的通信。在该项目中最关键的技术就是下位机modbus协议的解析。
首先介绍下昆仑屏(TPC),项目中用到的触摸屏采用的RS232接口,modbus协议。
采用的驱动是:莫迪康ModbusRTU;本驱动支持 01、02、03、04、05、06、15、16 常用功能码。
本驱动构件支持的寄存器及功能码说明如下:
“莫迪康 ModbusRTU”子设备参数设置如下:
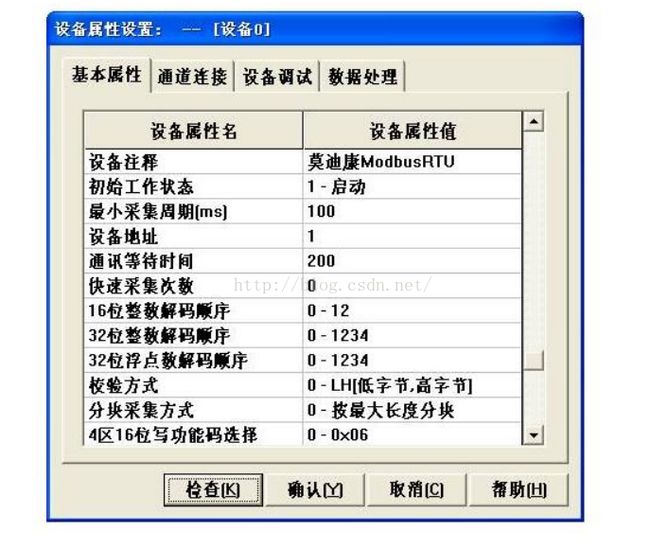
16 位整数解码顺序 举例:0x0001
0―12 表示字元件高低字节不颠倒(默认值) 表示 1
1―21 表示字元件高低字节颠倒 表示 256
32 位整数解码顺序 举例: 0x0000 0001
0―1234 表示双字元件不做处理直接解码(默认值) 表示 1
1―2143 表示双字元件高低字不颠倒,但字内高低字节颠倒 表示256
2—3412表示双字元件高低字颠倒,但字内高低字节不颠倒 表示65536
3—4321表示双字元件内 4 个字节全部颠倒 表示 1677 7216
32 位浮点数解码顺序 举例:0x3F80 0000
0―1234 表示双字元件不做处理直接解码(默认值) 表示 1.0
1―2143 表示双字元件高低字不颠倒,但字内高低字节颠倒 表示-5.78564e-039
2—3412表示双字元件高低字颠倒,但字内高低字节不颠倒 表示2.27795e-041
3—4321表示双字元件内 4 个字节全部颠倒 表示 4.60060e-041
使用默认设置即可。
0—LH[低字节,高字节]:校验结果为 2 个字节,低字节在前,高字节在后。
1—HL[高字节,低字节]:校验结果为 2 个字节,高字节在前,低字节在后。
(10)分块采集方式:驱动采集数据分块的方式,对于Modicon PLC及标准 PLC设备,使用默认设置可以提高采集效率。
0— 按最大长度分块:采集分块按最大块长处理,对地址不连续但地址相近的多个分块,分为一块一次性读取,以优化采集效率。
1— 按连续地址分块:采集分块按地址连续性处理,对地址不连续的多个分块,每次只采集连续地址,不做优化处理。
例如:有4 区寄存器地址分别为 1~5,7,9~12的数据需采集,如果选择“0-按最大长度分块” ,则两块可优化为地址1~12的数据打包 1次完成采集;如果选择“1-按连续地址分块” ,则需要采集 3 次。
(11)4区 16 位写功能码选择:写 4 区单字时功能码的选择,这个属性主要是针对自己制作设备的用户而设置的,这样的设备4 区单字写可能只支持 0x10 功能码,而不支持 0x06 功能码。
0—0x06:单字写功能码使用0x06。
1—0x10:单字写功能码使用0x10。
注意:
1. “解码顺序”及“校验方式”设置:主要是针对非标准 ModbusRTU 协议的不同解码及校验顺序。当用户通过本驱动软件与设备通讯时,如果出现解析数据值不对,或者通讯校验错误(通讯状态为3),可与厂家咨询后对以上两项进行设置。而对于ModiconPLC及支持标准 ModbusRTU 的 PLC 及控制器等设备,一般需将“32位整数解码顺序”和“32位浮点数解码顺序”设置为“2-3412” 。 另外,在使用本驱动与“Modbus 串口数据转发设备”构件通讯时, “解码顺序”及“校验方式”均需按默认值设置,否则会导致通讯失败或解析数据错误。
2. “分块采集方式”设置:主要是针对非标准 ModbusRTU协议设备。当用户通过本驱动软件与设备通讯时,如果按默认“0-按最大长度分块”时,出现读取连续地址正常,而不连续地址不正常时,可与厂家咨询,并设置为“1-按连续地址分块方式”尝试是否可正常通讯。 而对于 Modicon PLC 及支持标准 ModbusRTU 的 PLC 及控制器等设备,直接使用默认设置即可,这样可以提高采集效率。
2、采集通道
a、 通讯状态:
通讯状态值 代表意义
0 表示当前通讯正常
1 表示采集初始化错误
2 表示采集无数据返回错误
3 表示采集数据校验错误
4 表示设备命令读写操作失败错误
5 表示设备命令格式或参数错误
6 表示设备命令数据变量取值或赋值错误
3、 内部属性
用户可通过内部属性,添加通道,本驱动构件可支持 ModbusRTU 寄存器类型及对应功能码如下:
寄存器 数据类型 读取功能码 写入功能码 操作方式 通道举例
[1 区]输入继电器 BT 02 — 只读 只读10001表示 1区地址 1
[0区]输出继电器 BT 01 05、15 读写 读写 00001 表示 0区地址1
[3 区]输入寄存器 BT、WUB、WB、WDDUB、DB、DD、DF、STR 04 — 只读 只读30001 表示 3区地址1
[4 区]输出寄存器 BT、WUB、WB、WDDUB、DB、DD、DF、STR 03 06、16 读写 读写40001 表示 4区地址1
说明:
功能码:[1区]、[3区]不支持写操作;[4区]在双字(32位)数据写操作或批量写入多个
数据时,使用 16 功能码。

4、莫迪康ModbusRTU协议格式
读:
主机查询:
从机地址---功能码---起始地址----开关量或寄存器个数-----CRC校验码
1Byte------1Byte----2Byte-----------2Byte----------------------------2Byte
从机响应:
从机地址---功能码---数据长度----响应数据---CRC校验码
1Byte------1Byte----1Byte-----------nByte------------2Byte
写一路:
从机地址--功能码--起始地址----控制命令---CRC校验码
1Byte------1Byte----2Byte----------2Byte-------------2Byte
从机地址---功能码---起始地址------控制命令-------CRC校验码
1Byte------1Byte-------2Byte------------2Byte--------2Byte
写多路:
从机地址--功能码--起始地址--开关量或寄存器个数---数据长度-控制命令---CRC校验码
1Byte------1Byte----2Byte-----------1Byte----------------------1Byte-----------------2Byte
从机地址---功能码---起始地址--开关量或寄存器个数---CRC校验码
1Byte------1Byte-------1Byte------------1Byte---------------2Byte
起始地址的理解:起始地址是为了确定读哪几路信号,从第几路开始读。
起始地址是指每一路信号在主机里面的数据存储地址,与从机里的数据地址是有区别的。
要弄清楚从机里每一路信号的存储格式,使主机和从机每一路信号地址对应上。
以TPC为例:开关量信号在其内是连续存储的,递加1;而浮点数(32bit)不是连续的,是递加2的。
怎么获取TPC屏的功能码?
采取试验的方式,在设备窗口->设备编辑窗口里增加一些通道,未连接变量的通道主机不会向从机发送请求信息,只有连接变量的通道才会向从机发送请求信息,而且有几个通道连接变量,主机读或写几个通道。
功能码列表:
| 功能码(Hex) |
定义 |
|
| 01 |
读一路或多路开关量输出(读DO) |
读DO1: 01 01 00 01 00 01 AC 0A |
| 读地址为00 01的一路DO |
||
| 02 |
读一路或多路开关量输入(读DI) |
读16个DI(DI0--DI15):01 02 00 00 00 10 79 C6 |
| 起始地址00 00;DI个数为00 10 |
||
| 03 |
读一路或多路寄存器输出(读AO) |
读AO0: 01 03 00 00 00 04 44 09 |
| 00 04表示读两路AO,在TPC中占4个寄存器(16bit) |
||
| 04 |
读一路或多路寄存器输入(读AI) |
读AI0、AI1:01 04 00 00 00 04 F1 C9 |
| 00 04表示:在TPC中占4个寄存器(16bit) |
||
| 05 |
写一路开关量输出(写DO) |
DO0置1: 01 05 00 00 FF 00 8C 3A |
| DO1置1: 01 05 00 01 FF 00 DD FA |
||
| 06 |
写一路寄存器输出(写AO) |
|
|
|
||
| 0F |
写一路或多路开关量输出(写DO) |
|
| 10 |
写一路或多路寄存器输出(写AO) |
AO1:01 10 00 02 00 02 04 40 40 00 00 66 62 |
| AO0:01 10 00 00 00 02 04 40 00 00 00 E6 6F |
|
|
5、程序参考: |
下面是我在项目中写的modbus协议处理这块,数据主要包括:10路DO、16路DI、4路AI、7路温度、2路AO
char dealUsart2RecCom(void)
{
unsigned char cCRC[2];//保存上位机发的命令的最后两位校验码
unsigned int RxDataBeginAddr; //数据起始地址
unsigned int RxDataLen;//开关量或寄存器个数
//临时变量
unsigned int tempDO=0x0000;
unsigned int tempDO1=0xffff;
unsigned int tempDI=0x0000;
unsigned int tempDI1=0xffff;
unsigned int i;
unsigned int tempDOH=0x00;
unsigned int tempDOL=0x00;
unsigned int tempvalue=0x00;
unsigned int tempchID=0x00;
float tempdax;
memset(cCRC,0,2);
memset(SendData2,0,sizeof(SendData2));
if(USART2_RX_LEN<8)
{
USART2_RX_LEN=0;//数据长度
memset(USART2_RX_BUF,0,sizeof(USART2_RX_BUF));
return 1; //命令至少8个字节
}
cCRC[0]=USART2_RX_BUF[USART2_RX_LEN-2];
cCRC[1]=USART2_RX_BUF[USART2_RX_LEN-1];
PASSCRC(USART2_RX_BUF,USART2_RX_LEN-2); //CRC校验
if((cCRC[0]==USART2_RX_BUF[USART2_RX_LEN-2])&&(cCRC[1]==USART2_RX_BUF[USART2_RX_LEN-1]))
{//校验成功
SendData2[0]=USART2_RX_BUF[0];//从机地址
SendData2[1]=USART2_RX_BUF[1];//功能码
//USART2_RX_BUF[2] 是高8位 USART2_RX_BUF[3]是低8位
RxDataBeginAddr=USART2_RX_BUF[2]*256+USART2_RX_BUF[3];//转化成10进制
RxDataLen=USART2_RX_BUF[4]*256+USART2_RX_BUF[5];//转化成10进制
if(SendData2[1]==0x01)//0x01-读开关量输出DO的状态 //功能码
{
if (RxDataLen%8==0) SendData2[2]=RxDataLen/8;//字节个数 响应数据长度按字节来算
else SendData2[2]=RxDataLen/8+1;
//读取10路DO
tempDO=0x0000;
tempDO1=0xffffffff;
tempDO=DO_OUTState();
tempDO=tempDO>>RxDataBeginAddr;//起始DO位 如RxDataBeginAddr=2,即从第三个DO开始
tempDO1=~(tempDO1<<RxDataLen);//tempDO1的低RxDataLen位为1,其余为0
tempDO=tempDO&tempDO1;//获取起始地址为RxDataBeginAddr,个数为RxDataLen的DO状态
if(RxDataLen<9)//小于等于8个DO,一个字节就够
{
SendData2[3]=tempDO;
SendDataLength2=4;//发送数据的长度 不算校验
}
else
{
SendData2[3]=tempDO;
SendData2[4]=tempDO>>8;
SendDataLength2=5;//发送数据的长度
}
}
else if(SendData2[1]==0x02)//0x02-读开关量DI
{
if (RxDataLen%8==0) SendData2[2]=RxDataLen/8;//字节个数 响应数据长度按字节来算
else SendData2[2]=RxDataLen/8+1;
//读取16路DI
tempDI=0x0000;
tempDI1=0xffffffff;
tempDI=DI_In();
tempDI=tempDI>>RxDataBeginAddr;//起始DI位 如RxDataBeginAddr=2,即从第三个DI开始
tempDI1=~(tempDI1<<RxDataLen);//tempDI1的低RxDataLen位为1,其余为0
tempDI=tempDI&tempDI1;//获取起始地址为RxDataBeginAddr,个数为RxDataLen的DI状态
if(RxDataLen<9)//小于等于8个DI,一个字节就够
{
SendData2[3]=tempDI;
SendDataLength2=4;//发送数据的长度 不算校验
}
else
{
SendData2[3]=tempDI;
SendData2[4]=tempDI>>8;
SendDataLength2=5;//发送数据的长度
}
}
else if (SendData2[1]==0x03)//读输出寄存器 2个AO
{
SendData2[2]=RxDataLen*2;//浮点数占4个字节
for(i=0;i<RxDataLen/2;i++)//浮点数个数
{
ftoc(*(dax+RxDataBeginAddr/2+i));//浮点数转化成四个字节数据
SendData2[3+i*4]=e[3];
SendData2[3+i*4+1]=e[2];
SendData2[3+i*4+2]=e[1];
SendData2[3+i*4+3]=e[0];
}
SendDataLength2=3+i*4;//发送数据的长度
}
else if (SendData2[1]==0x04)//读输入寄存器 AI
{
SendData2[2]=RxDataLen*2;//浮点数占4个字节,发长度为4。RxDataLen为寄存器(16bit)个数
//AI 4路
for(i=0;i<RxDataLen/2-7;i++)//RxDataLen/2为浮点数个数 4路AI
{
ftoc(adx[RxDataBeginAddr/2+i]);
SendData2[3+i*4]=e[3];
SendData2[3+i*4+1]=e[2];
SendData2[3+i*4+2]=e[1];
SendData2[3+i*4+3]=e[0];
}
//SendDataLength2=3+i*4;//发送数据的长度
//温度数据 7路:6路温度 1路平均
for(i=0;i<7;i++)//7路温度
{
ftoc(fBuffTemp[i]);
SendData2[3+(RxDataLen/2-7)*4+i*4]=e[3];
SendData2[3+(RxDataLen/2-7)*4+i*4+1]=e[2];
SendData2[3+(RxDataLen/2-7)*4+i*4+2]=e[1];
SendData2[3+(RxDataLen/2-7)*4+i*4+3]=e[0];
}
SendDataLength2=3+(RxDataLen/2-7)*4+i*4;//发送数据的长度
}
else if (SendData2[1]==0x05)//写一路开关量
{
for(i=2;i<6;i++)
{
SendData2[i]=USART2_RX_BUF[i];
}
SendDataLength2=6;
//DO数据处理 10路DO
if(RxDataBeginAddr<10)
{
if (USART2_RX_BUF[4]==0xFF) DO_Out(1,RxDataBeginAddr);
else DO_Out(0,RxDataBeginAddr);
}
}
else if (SendData2[1]==0x0F)//写一路或多路开关量
{
for(i=2;i<6;i++)
{
SendData2[i]=USART2_RX_BUF[i];
}
SendDataLength2=6;
//DO数据处理 10路DO
tempDOH=0x00;
tempDOL=0x00;
tempvalue=0x00;
tempchID=0x00;
if(RxDataLen<9)//小于等于8路DO
{
tempDOL=USART2_RX_BUF[7];
tempDOL=tempDOL>>RxDataBeginAddr;
tempchID=RxDataBeginAddr;//起始地址
for(i=0;i<RxDataLen;i++)
{
tempvalue=(tempDOL>>i)&0x01;
DO_Out(tempvalue,tempchID+i);
}
}
else
{
tempDOH=USART2_RX_BUF[7];
tempDOL=USART2_RX_BUF[8];
tempDOL=tempDOL>>RxDataBeginAddr;
tempchID=RxDataBeginAddr;//起始地址
for(i=0;i<8;i++)
{
tempvalue=(tempDOL>>i)&0x01;
tempchID=i;
DO_Out(tempvalue,tempchID);
}
tempchID=tempchID+1;
for(i=0;i<RxDataLen-8;i++)
{
tempvalue=(tempDOH>>i)&0x01;
DO_Out(tempvalue,tempchID+i);
}
}
}
else if (SendData2[1]==0x10)//写一路或多路寄存器 AO
{
for(i=2;i<6;i++)
{
SendData2[i]=USART2_RX_BUF[i];
}
SendDataLength2=6;
//写一路寄存器 AO数据处理 2路AO
for(i=0;i<4;i++)
{
e[i]=SendData2[10-i];//字节倒序存入e[4],e[0]=SendData[10];e[1]=SendData[9]; e[2]=SendData[8];e[3]=SendData[7];
}
if(RxDataLen==2)//TPC里面模拟量32bit 每个模拟量对应两个寄存器 RxDataLen是2的倍数
{
tempdax=ByteToFloat(e);//将字节转化成浮点数
Dac_Set_Vol(RxDataBeginAddr/2,tempdax);
}
}
//对数据进行校验
PASSCRC(SendData2,SendDataLength2);
SendDataLength2=SendDataLength2+2;
USART2_Send_Data(SendData2,SendDataLength2);
Delay_us(1000);//1ms
}
else
{
SendDataLength2=0;
memset(SendData2,0,sizeof(SendData2));
}
USART2_RX_LEN=0;//数据长度
memset(USART2_RX_BUF,0,sizeof(USART2_RX_BUF));
return 1;
}