灰度图像--图像分割 霍夫变换(Hough Transform)--直线
学习DIP第50天
转载请标明本文出处:http://blog.csdn.net/tonyshengtan ,出于尊重文章作者的劳动,转载请标明出处!文章代码已托管,欢迎共同开发:https://github.com/Tony-Tan/DIPpro
开篇废话
废话开始,要过年了,到处人心惶惶,沉下心写篇博客,下一篇就等农历新年以后了。马上新年了,希望自己在新年能提高技术,找到一份图像处理的好工作,也希望大家都能学习到更多的知识,做自己喜欢做的事情。
以前基本每天都写博客,坚持了三个月感觉确实有提高,也能把知识总结分享出来,看着每天博客的访问量不断增长,心里很有成就感,共同学习,共同进步,喜欢分享的人,才能获得别人的分享,好多优秀的同学并不喜欢分享知识,或者用很高深的话显示出自己的知识,现在想想,能用俗话说清相对论的人才是高手,让那些故弄玄虚,作假,抄袭欺骗国家欺骗人民的院士,专家都去shi吧。
废话稍微多了一点点,说说霍夫变换,Hough Transform,由Hough提出,问题原型是如何找到图像中的直线,后来延伸到可以检测出任何可以表示成方程的图形,霍夫变换的检测可以检测不完整的图形,也就是中间有间断的,并且霍夫变换对旋转具有不变性,对噪声不敏感,但是霍夫变换的缺点是需要的存储量较大,标准的霍夫变换运算量大,相对较慢。
本篇只介绍标准霍夫变换对直线的检测,放在图像分割这部分是因为冈萨雷斯书中将霍夫变换用于连接边缘。
数学原理
我们本篇只介绍检测直线,对于图像中直线,一般用方程 y=kx+b ,式子中 k 表示直线的斜率, b 表示直线相对于y轴的截距,如图中所示:
如果按照正常思维,搜索图中的直线,使用穷举的方法,假设图像一共有N个像素任意两点可以构成一条直线,所以过一点应该有(N-1)/2条,所以全图像存在N(N-1)/2条直线,如果要确定一点是否是直线上的点,一共需要至少 N2(N−1)/2 次计算,这个代价的算法在实际中基本没有价值,于是,Hough提出了一种巧妙的方法,将直线表示成 −b=xk−y 这种变换的意义在于自变量不是x而是k,y也不再是因变量,b变成了因变量,所以图像上任意两点,可以从(x,y)坐标系映射到(k,b)坐标系,系数选取点 (x1=1.8,y1=7.6) 和点 (x2=3.4,y2=10.8) ,绘制出两条曲线:

可以根据上图得出k=2,b=4,那么在 y=kx+b 的点的在k,b坐标系上的交点都在(2,-4)处,
根据上面我们可以利用这个特点,将一幅图像从(x,y)坐标系,转换到(k,b)坐标系,假设原图中有k个亮点,可以在(k,b)坐标系画出k条直线,那么越多的直线交于一点,说明该点的坐标为斜率和截距的直线点在原图中出现频率越大,那么我们就能根据这个特点找出这些点。
问题来了,当原图直线和x轴垂直时,斜率k趋近于无穷大,所以在(k,b)坐标系内无法表示,所以我们换一种方法,使用直线 y=kx+b 的法线,截距为-b,那么这条直线为 y=−1kx−b ,如果使用参数方程,原直线为 cos(θ)y−sin(θ)∗x=cos(θ)b ,令 ϱ=cos(θ)b 原坐标的直线为 cos(θ)y−sin(θ)∗x=ϱ ,那么法线的参数方程为 sin(θ)y+cos(θ)∗x=−ϱ ,方程坐标系为 (θ,ϱ) 。
将上面的思想应用到 (θ,ϱ) 坐标系,我们将得到,如下的信息,原图:
转换到参数坐标系:
交点出就是两条对角线的参数。
我们来观察一条直线的参数坐标系:
水平直线:
对应参数坐标系:
垂直直线:

对应参数坐标系:

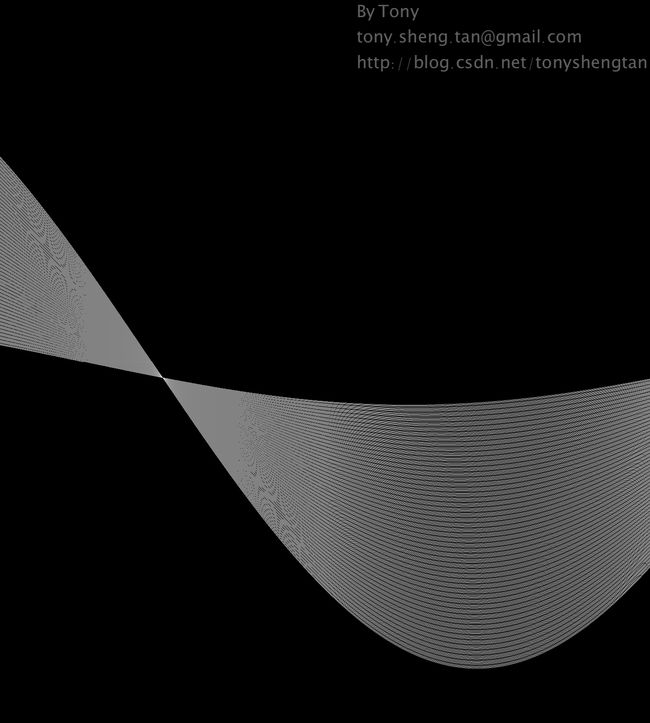
45°直线:
对应参数坐标系:
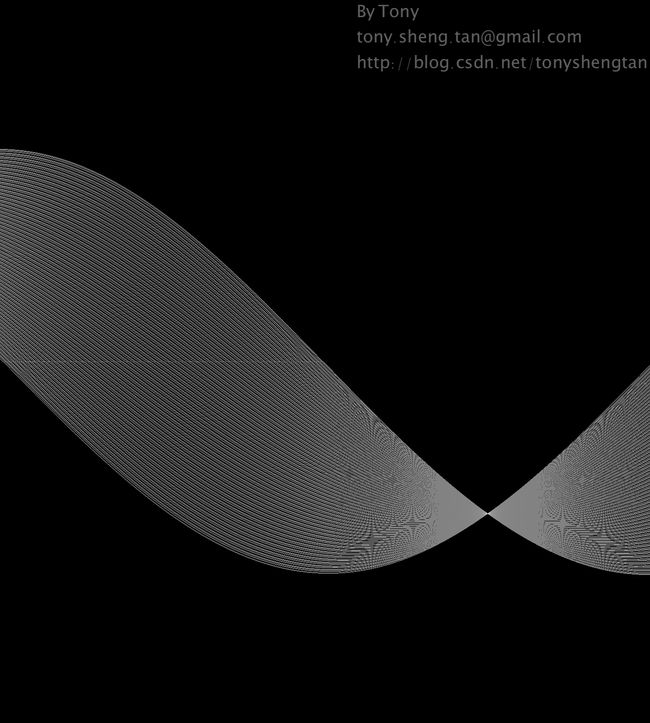
-45°直线:
对应参数坐标系:
五条直线交于一点:
对应参数坐标系:

上图中越明亮的点说明重叠参数方程越多,我们来观察两条直线对应参数坐标系的立体情况:
原图:
平面的参数方程坐标系:
参数方程坐标系的立体显示:




代码
void SHT(int x,int y,int zero,double * polar){
double angle_step=POLARSTEP;
double angle=-M_PI_2;
for(int i=0;i<POLARWIDTH;i++){
int p_y=(int)(((sin(angle)*y+cos(angle)*x)+0.5)*POLARHEIGHT_ZOOM)+zero;
polar[p_y*POLARWIDTH+i]++;
angle+=angle_step;
}
}
/////////////////////////////////////////////////////////////////////////////
void HoughLine(double *src,double *dst,int width,int height,int lineLength){
int polar_height=2*POLARHEIGHT_ZOOM*(int)(sqrt(width*width+height*height)+1);
int polar_width=POLARWIDTH;
double *polar=(double *)malloc(sizeof(double)*polar_height*polar_width);
Zero(polar,polar_width,polar_height);
for(int j=0;j<height;j++){
for(int i=0;i<width;i++){
if(src[j*width+i]==255.0)
SHT(i, j,polar_height/2,polar);
}
}
for(int j=0; j<polar_height;j++)
for(int i=0;i<polar_width;i++){
if(polar[j*polar_width+i]>lineLength){
double theta=i*POLARSTEP;
if(theta==M_PI_2)
DrawLine(dst, width, height, theta, abs(j-polar_height/2)/POLARHEIGHT_ZOOM);
else if (theta==0)
DrawLine(dst, width, height, theta, abs(j-polar_height/2)/POLARHEIGHT_ZOOM);
else{
DrawLine(dst, width, height, theta, -(int)((j-polar_height/2)/cos(i*POLARSTEP))/POLARHEIGHT_ZOOM);
}
}
}
free(polar);
}
效果
Hough变换输入图像因为边缘图像,或是二值图像效果如下图:
原图:

边缘检测:

霍夫直线检测:
原图:
边缘检测:

霍夫直线检测:

结论
霍夫变换可以有效的检测出图像中的直线,但需要设定一定的参数,比如定位参数坐标中极大值的方法,以避免错误的检出结果,广义的霍夫变换可以检测任何 g(x⃗ ,c⃗ )=0 表示的形状,只是计算难度根据方程的复杂度决定, c⃗ 表示方程参数,参数越多需要的存储空间越大,需要的计算量也越大。
待续。。。