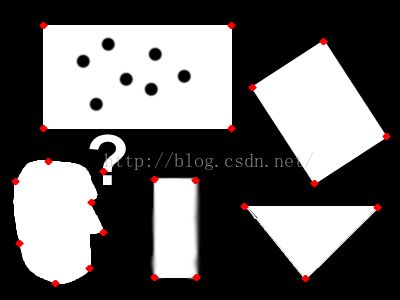
【OpenCV】角点检测
#include <stdio.h>
#include "cv.h"
#include "highgui.h"
#define MAX_CORNERS 100
int main(void)
{
int cornersCount=MAX_CORNERS;//得到的角点数目
CvPoint2D32f corners[MAX_CORNERS];//输出角点集合
IplImage *srcImage = 0,*grayImage = 0,*corners1 = 0,*corners2 = 0;
int i;
CvScalar color = CV_RGB(255,0,0);
char *filename = "pic3.png";
cvNamedWindow("image",1);
//Load the image to be processed
srcImage = cvLoadImage(filename,1);
grayImage = cvCreateImage(cvGetSize(srcImage),IPL_DEPTH_8U,1);
//copy the source image to copy image after converting the format
//复制并转为灰度图像
cvCvtColor(srcImage,grayImage,CV_BGR2GRAY);
//create empty images os same size as the copied images
//两幅临时32位浮点图像,cvGoodFeaturesToTrack会用到
corners1 = cvCreateImage(cvGetSize(srcImage),IPL_DEPTH_32F,1);
corners2 = cvCreateImage(cvGetSize(srcImage),IPL_DEPTH_32F,1);
cvGoodFeaturesToTrack(grayImage,corners1,
corners2,corners,
&cornersCount,0.05,
30,//角点的最小距离是30
0,//整个图像
3,0,0.4);
//默认值
printf("num corners found: %d/n",cornersCount);
//开始画出每个点
if (cornersCount>0)
{
for (i=0;i<cornersCount;i++)
{
cvCircle(srcImage,cvPoint((int)(corners[i].x),(int)(corners[i].y)),
2,color,2,CV_AA,0);
}
}
cvShowImage("image",srcImage);
cvSaveImage("imagedst.png",srcImage);
cvReleaseImage(&srcImage);
cvReleaseImage(&grayImage);
cvReleaseImage(&corners1);
cvReleaseImage(&corners2);
cvWaitKey(0);
return 0;
}