openCV2.角点检测
文章目录:
一、Harris角点检测基本理论
二、opencv代码实现
三、改进的Harris角点检测
四、FAST角点检测
五、参考文献
六、附录(资料和源码)
一、Harris角点检测基本理论(要讲清楚东西太多,附录提供文档详细说明)
1.1 简略表达:
角点:最直观的印象就是在水平、竖直两个方向上变化均较大的点,即Ix、Iy都较大
边缘:仅在水平、或者仅在竖直方向有较大的变化量,即Ix和Iy只有其一较大
平坦地区:在水平、竖直方向的变化量均较小,即Ix、Iy都较小
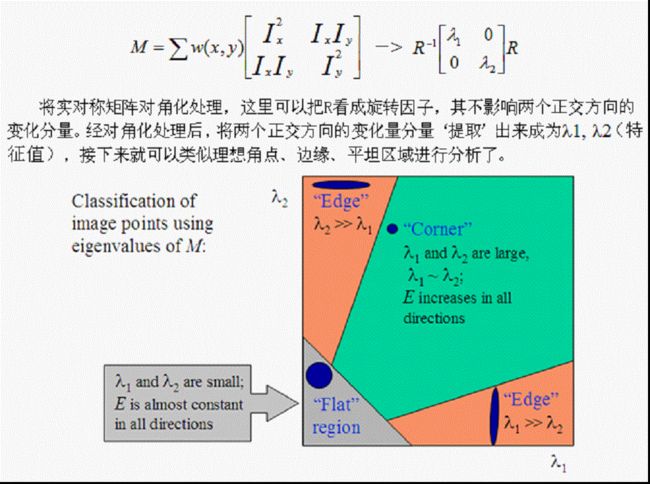
角点响应
R=det(M)-k*(trace(M)^2) (附录资料给出k=0.04~0.06,opencv指出是0.05-0.5,浮动较大)
det(M)=λ1*λ2 trace(M)=λ1+λ2
R取决于M的特征值,对于角点|R|很大,平坦的区域|R|很小,边缘的R为负值。
1.2 详细描述:见附录里的ppt
1.3 算法步骤


其中,局部极大值可用先膨胀后与原图比较的方法求得,具体见二中源码。
二、opencv代码实现
#ifndef HARRIS_H
#define HARRIS_H
#include "opencv2/opencv.hpp"
class harris
{
private:
cv::Mat cornerStrength; //opencv harris函数检测结果,也就是每个像素的角点响应函数值
cv::Mat cornerTh; //cornerStrength阈值化的结果
cv::Mat localMax; //局部最大值结果
int neighbourhood; //邻域窗口大小
int aperture;//sobel边缘检测窗口大小(sobel获取各像素点x,y方向的灰度导数)
double k;
double maxStrength;//角点响应函数最大值
double threshold;//阈值除去响应小的值
int nonMaxSize;//这里采用默认的3,就是最大值抑制的邻域窗口大小
cv::Mat kernel;//最大值抑制的核,这里也就是膨胀用到的核
public:
harris():neighbourhood(3),aperture(3),k(0.01),maxStrength(0.0),threshold(0.01),nonMaxSize(3){
};
void setLocalMaxWindowsize(int nonMaxSize){
this->nonMaxSize = nonMaxSize;
};
//计算角点响应函数以及非最大值抑制
void detect(const cv::Mat &image){
//opencv自带的角点响应函数计算函数
cv::cornerHarris (image,cornerStrength,neighbourhood,aperture,k);
double minStrength;
//计算最大最小响应值
cv::minMaxLoc (cornerStrength,&minStrength,&maxStrength);
cv::Mat dilated;
//默认3*3核膨胀,膨胀之后,除了局部最大值点和原来相同,其它非局部最大值点被
//3*3邻域内的最大值点取代
cv::dilate (cornerStrength,dilated,cv::Mat());
//与原图相比,只剩下和原图值相同的点,这些点都是局部最大值点,保存到localMax
cv::compare(cornerStrength,dilated,localMax,cv::CMP_EQ);
}
//获取角点图
cv::Mat getCornerMap(double qualityLevel) {
cv::Mat cornerMap;
// 根据角点响应最大值计算阈值
threshold= qualityLevel*maxStrength;
cv::threshold(cornerStrength,cornerTh,
threshold,255,cv::THRESH_BINARY);
// 转为8-bit图
cornerTh.convertTo(cornerMap,CV_8U);
// 和局部最大值图与,剩下角点局部最大值图,即:完成非最大值抑制
cv::bitwise_and(cornerMap,localMax,cornerMap);
return cornerMap;
}
void getCorners(std::vector<cv::Point> &points,
double qualityLevel) {
//获取角点图
cv::Mat cornerMap= getCornerMap(qualityLevel);
// 获取角点
getCorners(points, cornerMap);
}
// 遍历全图,获得角点
void getCorners(std::vector<cv::Point> &points,
const cv::Mat& cornerMap) {
for( int y = 0; y < cornerMap.rows; y++ ) {
const uchar* rowPtr = cornerMap.ptr<uchar>(y);
for( int x = 0; x < cornerMap.cols; x++ ) {
// 非零点就是角点
if (rowPtr[x]) {
points.push_back(cv::Point(x,y));
}
}
}
}
//用圈圈标记角点
void drawOnImage(cv::Mat &image,
const std::vector<cv::Point> &points,
cv::Scalar color= cv::Scalar(255,255,255),
int radius=3, int thickness=2) {
std::vector<cv::Point>::const_iterator it=points.begin();
while (it!=points.end()) {
// 角点处画圈
cv::circle(image,*it,radius,color,thickness);
++it;
}
}
};
#endif // HARRIS_H
相关测试代码:
cv::Mat image, image1 = cv::imread ("test.jpg");
//灰度变换
cv::cvtColor (image1,image,CV_BGR2GRAY);
// 经典的harris角点方法
harris Harris;
// 计算角点
Harris.detect(image);
//获得角点
std::vector<cv::Point> pts;
Harris.getCorners(pts,0.01);
// 标记角点
Harris.drawOnImage(image,pts);
cv::namedWindow ("harris");
cv::imshow ("harris",image);
cv::waitKey (0);
return 0;
三、改进的Harris角点检测
从经典的Harris角点检测方法不难看出,该算法的稳定性和k有关,而k是个经验值,不好把握,浮动也有可能较大。鉴于此,改进的Harris方法()直接计算出两个特征值,通过比较两个特征值直接分类,这样就不用计算Harris响应函数了。
另一方面,我们不再用非极大值抑制了,而选取容忍距离:容忍距离内只有一个特征点。
该算法首先选取一个具有最大 最小特征值的点(即:max(min(e1,e2)),e1,e2是harris矩阵的特征值)作为角点,然后依次按照最大最小特征值顺序寻找余下的角点,当然和前一角点距离在容忍距离内的新角点呗忽略。
opencv测试该算法代码如下:
cv::Mat image, image1 = cv::imread ("test.jpg");
//灰度变换
cv::cvtColor (image1,image,CV_BGR2GRAY);
// 改进的harris角点检测方法
std::vector<cv::Point> corners;
cv::goodFeaturesToTrack(image,corners,
200,
//角点最大数目
0.01,
// 质量等级,这里是0.01*max(min(e1,e2)),e1,e2是harris矩阵的特征值
10);
// 两个角点之间的距离容忍度
harris().drawOnImage(image,corners);//标记角点
四、FAST角点检测
算法原理比较简单,但实时性很强。
该算法的角点定义为:若某像素点圆形邻域圆周上有3/4的点和该像素点不同(编程时不超过某阈值th),则认为该点就是候选角点。opencv更极端,选用半径为3的圆周上(上下左右)四个点,若超过三个点和该像素点不同,则该点为候选角点。
和Harris算法类似,该算法需要非极大值抑制。
opencv代码:
cv::Mat image, image1 = cv::imread ("test.jpg");
cv::cvtColor (image1,image,CV_BGR2GRAY);
//快速角点检测
std::vector<cv::KeyPoint> keypoints;
cv::FastFeatureDetector fast(40,true);
fast .detect (image,keypoints);
cv::drawKeypoints (image,keypoints,image,cv::Scalar::all(255),cv::DrawMatchesFlags::DRAW_OVER_OUTIMG);