Opencv2.4.9源码分析——MSER
最大稳定极值区域(MSER-Maximally Stable Extremal Regions)可以用于图像的斑点区域检测。该算法最早是由Matas等人于2002年提出,它是基于分水岭的概念。
MSER的基本原理是对一幅灰度图像(灰度值为0~255)取阈值进行二值化处理,阈值从0到255依次递增。阈值的递增类似于分水岭算法中的水面的上升,随着水面的上升,有一些较矮的丘陵会被淹没,如果从天空往下看,则大地分为陆地和水域两个部分,这类似于二值图像。在得到的所有二值图像中,图像中的某些连通区域变化很小,甚至没有变化,则该区域就被称为最大稳定极值区域。这类似于当水面持续上升的时候,有些被水淹没的地方的面积没有变化。它的数学定义为:
q(i)=|Qi+△-Qi-△|/|Qi| (1)
其中,Qi表示阈值为i时的某一连通区域,△为灰度阈值的微小变化量,q(i)为阈值是i时的区域Qi的变化率。当q(i)为局部极小值时,则Qi为最大稳定极值区域。
需要说明的是,上述做法只能检测出灰度图像的黑色区域,不能检测出白色区域,因此还需要对原图进行反转,然后再进行阈值从0~255的二值化处理过程。这两种操作又分别称为MSER+和MSER-。
MSER具有以下特点:
1、对图像灰度具有仿射变换的不变性;
2、稳定性:具有相同阈值范围内所支持的区域才会被选择;
3、无需任何平滑处理就可以实现多尺度检测,即小的和大的结构都可以被检测到。
MSER的原理比较简单,但要更快更好的实现它,是需要一定的算法、数据结构和编程技巧的。David Nister等人于2008年提出了Linear Time Maximally Stable Extremal Regions算法,该算法要比原著提出的算法快,opencv就是利用该算法实现MSER的。但这里要说明一点的是,opencv不是利用公式1计算MSER的,而是利用更易于实现的改进方法:
q(i)=|Qi-Qi-△|/|Qi-△| (2)
David Nister提出的算法是基于改进的分水岭算法,即当往一个固定的地方注水的时候,只有当该地方的沟壑被水填满以后,水才会向其四周溢出,随着注水量的不断增加,各个沟壑也会逐渐被水淹没,但各个沟壑的水面不是同时上升的,它是根据水漫过地方的先后顺序,一个沟壑一个沟壑地填满水,只有当相邻两个沟壑被水连通在一起以后,水面对于这两个沟壑来说才是同时上升的。该算法的具体步骤如下:
1、初始化栈和堆,栈用于存储组块(组块就是区域,就相当于水面,水漫过的地方就会出现水面,水面的高度就是图像的灰度值,因此用灰度值来表示组块的值),堆用于存储组块的边界像素,相当于水域的岸边,岸边要高于水面的,因此边界像素的灰度值一定不小于它所包围的区域(即组块)的灰度值。首先向栈内放入一个虚假的组块,当该组块被弹出时意味着程序的结束;
2、把图像中的任意一个像素(一般选取图像的左上角像素)作为源像素,标注该像素为已访问过,并且把该像素的灰度值作为当前值。这一步相当于往源像素这一地点注水;
3、向栈内放入一个空组块,该组块的值是当前值;
4、按照顺序搜索当前值的4-领域内剩余的边缘,对于每一个邻域,检查它是否已经被访问过,如果没有,则标注它为已访问过并检索它的灰度值,如果灰度值不小于当前值,则把它放入用于存放边界像素的堆中。另一方面,如果领域灰度值小于当前值,则把当前值放入堆中,而把领域值作为当前值,并回到步骤3;
5、累计栈顶组块的像素个数,即计算区域面积,这是通过循环累计得到的,这一步相当于水面的饱和;
6、弹出堆中的边界像素。如果堆是空的,则程序结束;如果弹出的边界像素的灰度值等于当前值,则回到步骤4;
7、从堆中得到的像素值会大于当前值,因此我们需要处理栈中所有的组块,直到栈中的组块的灰度值大于当前边界像素灰度值为止。然后回到步骤4。
至于如何处理组块,则需要进入处理栈子模块中,传入该子模块的值为步骤7中从堆中提取得到的边界像素灰度值。子模块的具体步骤为:
1)、处理栈顶的组块,即根据公式2计算最大稳定区域,判断其是否为极值区域;
2)、如果边界像素灰度值小于距栈顶第二个组块的灰度值,那么设栈顶组块的灰度值为边界像素灰度值,并退出该子模块。之所以会出现这种情况,是因为在栈顶组块和第二个组块之间还有组块没有被检测处理,因此我们需要改变栈顶组块的灰度值为边界像素灰度值(相当于这两层的组块进行了合并),并回到主程序,再次搜索组块;
3)、弹出栈顶组块,并与目前栈顶组块合并;
4)、如果边界像素灰度值大于栈顶组块的灰度值,则回到步骤1。
在opencv2.4.9中,MSER算法是用类的方法给出的:
- class MserFeatureDetector : public FeatureDetector
- {
- public:
- MserFeatureDetector( CvMSERParams params=cvMSERParams() );
- MserFeatureDetector( int delta, int minArea, int maxArea,
- double maxVariation, double minDiversity,
- int maxEvolution, double areaThreshold,
- double minMargin, int edgeBlurSize );
- virtual void read( const FileNode& fn );
- virtual void write( FileStorage& fs ) const;
- protected:
- ...
- };
- class MSER : public CvMSERParams
- {
- public:
- // default constructor
- //缺省的构造函数
- MSER();
- // constructor that initializes all the algorithm parameters
- //带有所有算法参数的构造函数
- MSER( int _delta, int _min_area, int _max_area,
- float _max_variation, float _min_diversity,
- int _max_evolution, double _area_threshold,
- double _min_margin, int _edge_blur_size );
- // runs the extractor on the specified image; returns the MSERs,
- // each encoded as a contour (vector<Point>, see findContours)
- // the optional mask marks the area where MSERs are searched for
- void operator()( const Mat& image, vector<vector<Point> >& msers, const Mat& mask ) const;
- };
- MSER算法所需要的参数较多:
- delta为灰度值的变化量,即公式1和2中的△;
- _min_area和_max_area为检测到的组块面积的范围;
- _max_variation为最大的变化率,即如果公式1和2中的q(i)小于该值,则被认为是最大稳定极值区域;
- _min_diversity为稳定区域的最小变换量。
- 其他的参数用于对彩色图像的MSER检测,这里不做介绍。
- MSER类通过重载( )运算符,得到了最大稳定极值区域的点集msers,其中image为输入图像,mask为掩码矩阵。
- 下面我们就对MSER类的源码进行分析:
- void MSER::operator()( const Mat& image, vector<vector<Point> >& dstcontours, const Mat& mask ) const
- {
- CvMat _image = image, _mask, *pmask = 0;
- if( mask.data )
- pmask = &(_mask = mask);
- MemStorage storage(cvCreateMemStorage(0));
- Seq<CvSeq*> contours;
- //调用extractMSER函数,得到MSER的区域点集序列contours.seq
- //MSERParams为MSER所需要的参数
- extractMSER( &_image, pmask, &contours.seq, storage,
- MSERParams(delta, minArea, maxArea, maxVariation, minDiversity,
- maxEvolution, areaThreshold, minMargin, edgeBlurSize));
- SeqIterator<CvSeq*> it = contours.begin();
- size_t i, ncontours = contours.size();
- dstcontours.resize(ncontours);
- //复制点集序列
- for( i = 0; i < ncontours; i++, ++it )
- Seq<Point>(*it).copyTo(dstcontours[i]);
- }
- static void
- extractMSER( CvArr* _img,
- CvArr* _mask,
- CvSeq** _contours,
- CvMemStorage* storage,
- MSERParams params )
- {
- CvMat srchdr, *src = cvGetMat( _img, &srchdr );
- CvMat maskhdr, *mask = _mask ? cvGetMat( _mask, &maskhdr ) : 0;
- CvSeq* contours = 0;
- CV_Assert(src != 0);
- CV_Assert(CV_MAT_TYPE(src->type) == CV_8UC1 || CV_MAT_TYPE(src->type) == CV_8UC3);
- CV_Assert(mask == 0 || (CV_ARE_SIZES_EQ(src, mask) && CV_MAT_TYPE(mask->type) == CV_8UC1));
- CV_Assert(storage != 0);
- contours = *_contours = cvCreateSeq( 0, sizeof(CvSeq), sizeof(CvSeq*), storage );
- // choose different method for different image type
- // for grey image, it is: Linear Time Maximally Stable Extremal Regions
- // for color image, it is: Maximally Stable Colour Regions for Recognition and Matching
- switch ( CV_MAT_TYPE(src->type) )
- {
- case CV_8UC1: //处理灰度图像
- extractMSER_8UC1( src, mask, contours, storage, params );
- break;
- case CV_8UC3: //处理彩色图像
- extractMSER_8UC3( src, mask, contours, storage, params );
- break;
- }
- }
- static void extractMSER_8UC1( CvMat* src,
- CvMat* mask,
- CvSeq* contours,
- CvMemStorage* storage,
- MSERParams params )
- {
- //为了加快运算速度,把原图的宽扩展成高度复合数,即2^N的形式
- //step为扩展后的宽,初始值为8
- int step = 8;
- //stepgap为N,初始值为3,即8=2^3
- int stepgap = 3;
- //通过step向左移位的方式扩展原图的宽
- while ( step < src->step+2 )
- {
- step <<= 1;
- stepgap++;
- }
- int stepmask = step-1;
- // to speedup the process, make the width to be 2^N
- //创建扩展后的图像矩阵,宽为2^N,高为原图高+2
- CvMat* img = cvCreateMat( src->rows+2, step, CV_32SC1 );
- //定义第二行地址
- int* ioptr = img->data.i+step+1;
- int* imgptr;
- // pre-allocate boundary heap
- //步骤1,初始化堆和栈
- //定义堆,用于存储组块的边界像素
- int** heap = (int**)cvAlloc( (src->rows*src->cols+256)*sizeof(heap[0]) );
- int** heap_start[256];
- //heap_start为三指针变量,heap_start为边界像素的灰度值,因此它数量为256个;*heap_start表示边界像素中该灰度值的数量;**heap_start表示边界像素中该灰度值中第*heap_start个所对应的像素地址指针。
- heap_start[0] = heap;
- // pre-allocate linked point and grow history
- //pts表示组块内像素链表,即像素间相互链接
- LinkedPoint* pts = (LinkedPoint*)cvAlloc( src->rows*src->cols*sizeof(pts[0]) );
- //history表示每个组块生长的状况,即随着阈值的增加,组块的大小是在不断扩大的
- MSERGrowHistory* history = (MSERGrowHistory*)cvAlloc( src->rows*src->cols*sizeof(history[0]) );
- //comp表示图像内连通的组块(即区域),原则上每一个灰度值就会有一个组块,但之所以组块的个数是257个,是因为有一个组块是虚假组块,用于表示程序的结束。用栈的形式来管理各个组块
- MSERConnectedComp comp[257];
- // darker to brighter (MSER-)
- //MSER-
- //先对原图进行预处理
- imgptr = preprocessMSER_8UC1( img, heap_start, src, mask );
- //执行MSER操作
- extractMSER_8UC1_Pass( ioptr, imgptr, heap_start, pts, history, comp, step, stepmask, stepgap, params, -1, contours, storage );
- // brighter to darker (MSER+)
- //MSER+
- imgptr = preprocessMSER_8UC1( img, heap_start, src, mask );
- extractMSER_8UC1_Pass( ioptr, imgptr, heap_start, pts, history, comp, step, stepmask, stepgap, params, 1, contours, storage );
- // clean up
- //清理内存
- cvFree( &history );
- cvFree( &heap );
- cvFree( &pts );
- cvReleaseMat( &img );
- }
preprocessMSER_8UC1函数为预处理的过程,主要就是对宽度扩展以后的图像矩阵进行赋值,每一位都赋予不同的含义:
// to preprocess src image to followingformat
// 32-bit image
// > 0 is available, < 0 is visited
// 17~19 bits is the direction
// 8~11 bits is the bucket it falls to (forBitScanForward)
// 0~8 bits is the color
/*定义图像矩阵的数据格式为有符号32位整型,最高一位表示是否被访问过,0表示没有被访问过,1表示被访问过(因为是有符号数,所以最高一位是1也就是负数);16~18位(这里源码注解有误)表示4邻域的方向;0~7位表示该像素的灰度值*/
//img代表图像矩阵,MSER处理的是该矩阵
//src为输入原图
//heap_cur为边界像素堆
//mask为掩码
- static int* preprocessMSER_8UC1( CvMat* img,
- int*** heap_cur,
- CvMat* src,
- CvMat* mask )
- {
- int srccpt = src->step-src->cols;
- //由于图像矩阵的宽经过了2^N处理,所以它的宽比原图的宽要长,cpt_1代表两个宽度的差值
- int cpt_1 = img->cols-src->cols-1;
- //图像矩阵的地址指针
- int* imgptr = img->data.i;
- //定义真实的图像起始地址
- int* startptr;
- //定义并初始化灰度值数组
- int level_size[256];
- for ( int i = 0; i < 256; i++ )
- level_size[i] = 0;
- //为图像矩阵的第一行赋值
- for ( int i = 0; i < src->cols+2; i++ )
- {
- *imgptr = -1;
- imgptr++;
- }
- //地址指针指向图像矩阵的第二行
- imgptr += cpt_1-1;
- //原图首地址指针
- uchar* srcptr = src->data.ptr;
- if ( mask ) //如果定义了掩码矩阵
- {
- startptr = 0;
- //掩码矩阵首地址指针
- uchar* maskptr = mask->data.ptr;
- //遍历整个原图
- for ( int i = 0; i < src->rows; i++ )
- {
- *imgptr = -1;
- imgptr++;
- for ( int j = 0; j < src->cols; j++ )
- {
- if ( *maskptr )
- {
- if ( !startptr )
- startptr = imgptr; //赋值
- *srcptr = 0xff-*srcptr; //反转图像的灰度值
- level_size[*srcptr]++; //为灰度值计数
- //为图像矩阵赋值,它的低8位是原图灰度值,8~10位是灰度值的高3位
- *imgptr = ((*srcptr>>5)<<8)|(*srcptr);
- } else { //掩码覆盖的像素值为-1
- *imgptr = -1;
- }
- //地址加1
- imgptr++;
- srcptr++;
- maskptr++;
- }
- //跳过图像矩阵比原图多出的部分
- *imgptr = -1;
- imgptr += cpt_1;
- srcptr += srccpt;
- maskptr += srccpt;
- }
- } else { //没有定义掩码
- startptr = imgptr+img->cols+1; //赋值
- //遍历整幅图像,为图像矩阵赋值
- for ( int i = 0; i < src->rows; i++ )
- {
- *imgptr = -1;
- imgptr++;
- for ( int j = 0; j < src->cols; j++ )
- {
- *srcptr = 0xff-*srcptr;
- level_size[*srcptr]++;
- *imgptr = ((*srcptr>>5)<<8)|(*srcptr);
- imgptr++;
- srcptr++;
- }
- *imgptr = -1;
- imgptr += cpt_1;
- srcptr += srccpt;
- }
- }
- //为图像矩阵的最后一行赋值
- for ( int i = 0; i < src->cols+2; i++ )
- {
- *imgptr = -1;
- imgptr++;
- }
- //定义边界像素堆的大小
- //heap_cur[]对应灰度值,heap_cur[][]对应该灰度值的个数
- //根据灰度值的个数定义heap_cur的长度
- heap_cur[0][0] = 0;
- for ( int i = 1; i < 256; i++ )
- {
- heap_cur[i] = heap_cur[i-1]+level_size[i-1]+1;
- heap_cur[i][0] = 0;
- }
- //返回在图像矩阵中第一个真正的像素点的地址
- return startptr;
- }
- static void extractMSER_8UC1_Pass( int* ioptr,
- int* imgptr,
- int*** heap_cur,
- LinkedPoint* ptsptr,
- MSERGrowHistory* histptr,
- MSERConnectedComp* comptr,
- int step,
- int stepmask,
- int stepgap,
- MSERParams params,
- int color,
- CvSeq* contours,
- CvMemStorage* storage )
- {
- //设置第一个组块的灰度值为256,该灰度值是真实图像中不存在的灰度值,以区分真实图像的组块,从而判断程序是否结束
- comptr->grey_level = 256;
- //步骤2和步骤3
- //指向第二个组块
- comptr++;
- //设置第二个组块为输入图像第一个像素(左上角)的灰度值
- comptr->grey_level = (*imgptr)&0xff;
- //初始化该组块
- initMSERComp( comptr );
- //在最高位标注该像素为已被访问过,即该值小于0
- *imgptr |= 0x80000000;
- //得到该像素所对应的堆,即指向它所对应的灰度值
- heap_cur += (*imgptr)&0xff;
- //定义方向,即偏移量,因为是4邻域,所以该数组分别对应右、下、左、上
- int dir[] = { 1, step, -1, -step };
- #ifdef __INTRIN_ENABLED__
- unsigned long heapbit[] = { 0, 0, 0, 0, 0, 0, 0, 0 };
- unsigned long* bit_cur = heapbit+(((*imgptr)&0x700)>>8);
- #endif
- //死循环,退出该死循环的条件有两个:一是到达组块的栈底;二是边界像素堆中没有任何值。达到栈底也就意味着堆中没有值,在此函数中两者是一致的。
- for ( ; ; )
- {
- // take tour of all the 4 directions
- //步骤4
- //在4邻域内进行搜索
- while ( ((*imgptr)&0x70000) < 0x40000 )
- {
- // get the neighbor
- /* ((*imgptr)&0x70000)>>16得到第16位至第18位数据,该数据对应的4邻域的方向,再通过dir数组得到4邻域的偏移量,因此imgptr_nbr为当前像素4邻域中某一个方向上邻域的地址指针 */
- int* imgptr_nbr = imgptr+dir[((*imgptr)&0x70000)>>16];
- //检查邻域像素是否被访问过,如果被访问过,则会在第一位置1,因此该值会小于0,否则第一位为0,该值大于0
- if ( *imgptr_nbr >= 0 ) // if the neighbor is not visited yet
- {
- //标注该像素已被访问过,即把第一位置1
- *imgptr_nbr |= 0x80000000; // mark it as visited
- //比较当前像素与邻域像素灰度值
- if ( ((*imgptr_nbr)&0xff) < ((*imgptr)&0xff) )
- {
- //如果邻域值小于当前值,把当前值放入堆中
- // when the value of neighbor smaller than current
- // push current to boundary heap and make the neighbor to be the current one
- // create an empty comp
- //堆中该像素灰度值的数量加1,即对该灰度值像素个数计数
- (*heap_cur)++;
- //把当前值的地址放入堆中
- **heap_cur = imgptr;
- //重新标注当前值的方向位,以备下一次访问该值时搜索下一个邻域
- *imgptr += 0x10000;
- //定位邻域值所对应的堆的位置
- //当前heap_cur所指向的灰度值为while循环搜索中的最小灰度值,即水溢过的最低点
- heap_cur += ((*imgptr_nbr)&0xff)-((*imgptr)&0xff);
- #ifdef __INTRIN_ENABLED__
- _bitset( bit_cur, (*imgptr)&0x1f );
- bit_cur += (((*imgptr_nbr)&0x700)-((*imgptr)&0x700))>>8;
- #endif
- imgptr = imgptr_nbr; //邻域值换为当前值
- //步骤3
- comptr++; //创建一个组块
- initMSERComp( comptr ); //初始化该组块
- comptr->grey_level = (*imgptr)&0xff; //为该组块的灰度值赋值
- //当某个邻域值小于当前值,则不对当前值再做任何操作,继续下次循环,在下次循环中,处理的则是该邻域值,即再次执行步骤4
- continue;
- } else {
- //如果邻域值大于当前值,把邻域值放入堆中
- // otherwise, push the neighbor to boundary heap
- //找到该邻域值在堆中的灰度值位置,并对其计数,即对该灰度值像素个数计数
- heap_cur[((*imgptr_nbr)&0xff)-((*imgptr)&0xff)]++;
- //把该邻域像素地址放入堆中
- *heap_cur[((*imgptr_nbr)&0xff)-((*imgptr)&0xff)] = imgptr_nbr;
- #ifdef __INTRIN_ENABLED__
- _bitset( bit_cur+((((*imgptr_nbr)&0x700)-((*imgptr)&0x700))>>8), (*imgptr_nbr)&0x1f );
- #endif
- }
- }
- *imgptr += 0x10000; //重新标注当前值的领域方向
- }
- //imsk表示结束while循环后所得到的最后像素地址与图像首地址的相对距离
- int imsk = (int)(imgptr-ioptr);
- //得到结束while循环后的最后像素的坐标位置
- //从这里可以看出图像的宽采样2^N的好处,即imsk>>stepgap
- ptsptr->pt = cvPoint( imsk&stepmask, imsk>>stepgap );
- // get the current location
- //步骤5
- //对栈顶的组块的像素个数累加,即计算组块的面积大小,并链接组块内的像素点
- //结束while循环后,栈顶组块的灰度值就是该次循环后得到的最小灰度值,也就是该组块为极低点,就相当于水已经流到了最低的位置
- accumulateMSERComp( comptr, ptsptr );
- //指向下一个像素点链表位置
- ptsptr++;
- // get the next pixel from boundary heap
- //步骤6
- /*结束while循环后,如果**heap_cur有值的话,heap_cur指向的应该是while循环中得到的灰度值最小值,也就是在组块的边界像素中,有与组块相同的灰度值,因此要把该值作为当前值继续while循环,也就是相当于组块面积的扩展*/
- if ( **heap_cur ) //有值
- {
- imgptr = **heap_cur; //把该像素点作为当前值
- (*heap_cur)--; //像素的个数要相应的减1
- #ifdef __INTRIN_ENABLED__
- if ( !**heap_cur )
- _bitreset( bit_cur, (*imgptr)&0x1f );
- #endif
- //步骤7
- //已经找到了最小灰度值的组块,并且边界像素堆中的灰度值都比组块的灰度值大,则这时需要组块,即计算最大稳定极值区域
- } else {
- #ifdef __INTRIN_ENABLED__
- bool found_pixel = 0;
- unsigned long pixel_val;
- for ( int i = ((*imgptr)&0x700)>>8; i < 8; i++ )
- {
- if ( _BitScanForward( &pixel_val, *bit_cur ) )
- {
- found_pixel = 1;
- pixel_val += i<<5;
- heap_cur += pixel_val-((*imgptr)&0xff);
- break;
- }
- bit_cur++;
- }
- if ( found_pixel )
- #else
- heap_cur++; //指向高一级的灰度值
- unsigned long pixel_val = 0;
- //在边界像素堆中,找到边界像素中的最小灰度值
- for ( unsigned long i = ((*imgptr)&0xff)+1; i < 256; i++ )
- {
- if ( **heap_cur )
- {
- pixel_val = i; //灰度值
- break;
- }
- //定位在堆中所对应的灰度值,与pixel_val是相等的
- heap_cur++;
- }
- if ( pixel_val ) //如果找到了像素值
- #endif
- {
- imgptr = **heap_cur; //从堆中提取出该像素
- (*heap_cur)--; //对应的像素个数减1
- #ifdef __INTRIN_ENABLED__
- if ( !**heap_cur )
- _bitreset( bit_cur, pixel_val&0x1f );
- #endif
- //进入处理栈子模块
- if ( pixel_val < comptr[-1].grey_level )
- //如果从堆中提取出的最小灰度值小于距栈顶第二个组块的灰度值,则说明栈顶组块和第二个组块之间仍然有没有处理过的组块,因此在计算完MSER值后还要继续返回步骤4搜索该组块
- {
- // check the stablity and push a new history, increase the grey level
- //利用公式2计算栈顶组块的q(i)值
- if ( MSERStableCheck( comptr, params ) ) //是MSER
- {
- //得到组块内的像素点
- CvContour* contour = MSERToContour( comptr, storage );
- contour->color = color; //标注是MSER-还是MSER+
- //把组块像素点放入序列中
- cvSeqPush( contours, &contour );
- }
- MSERNewHistory( comptr, histptr );
- //改变栈顶组块的灰度值,这样就可以和上一层的组块进行合并
- comptr[0].grey_level = pixel_val;
- histptr++;
- } else {
- //从堆中提取出的最小灰度值大于等于距栈顶第二个组块的灰度值
- // keep merging top two comp in stack until the grey level >= pixel_val
- //死循环,用于处理灰度值相同并且相连的组块之间的合并
- for ( ; ; )
- {
- //指向距栈顶第二个组块
- comptr--;
- //合并前两个组块,并把合并后的组块作为栈顶组块
- MSERMergeComp( comptr+1, comptr, comptr, histptr );
- histptr++;
- /*如果pixel_val = comptr[0].grey_level,说明在边界上还有属于该组块的像素;如果pixel_val < comptr[0].grey_level,说明还有比栈顶组块灰度值更小的组块没有搜索到。这两种情况都需要回到步骤4中继续搜索组块*/
- if ( pixel_val <= comptr[0].grey_level )
- break;
- //合并栈内前两个组块,直到pixel_val < comptr[-1].grey_level为止
- if ( pixel_val < comptr[-1].grey_level )
- {
- // check the stablity here otherwise it wouldn't be an ER
- if ( MSERStableCheck( comptr, params ) )
- {
- CvContour* contour = MSERToContour( comptr, storage );
- contour->color = color;
- cvSeqPush( contours, &contour );
- }
- MSERNewHistory( comptr, histptr );
- comptr[0].grey_level = pixel_val;
- histptr++;
- break;
- }
- }
- }
- } else
- //边界像素堆中没有任何像素,则退出死循环,该函数返回。
- break;
- }
- }
- }
MSER就分析到这里,至于其中用到的一些子函数就不再分析。这里还要说明一点的是,MSER+和MSER-使用的都是同一个函数,两者的区别是一个组块面积增加,另一个减少。说实话,该部分的内容数据结构较为复杂,有一些内容我理解得也不透彻,比如结构MSERGrowHistory真正的含义还比较模糊。
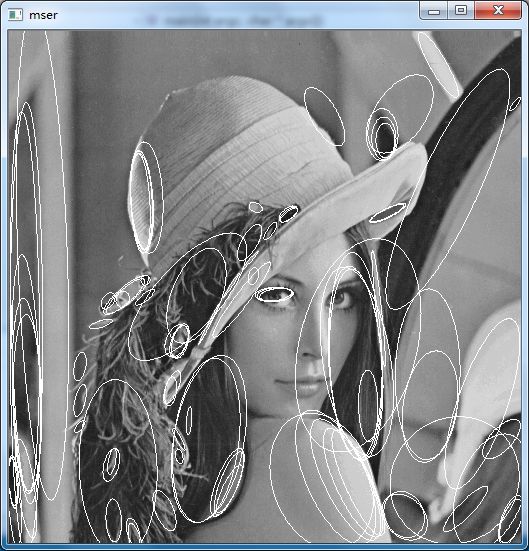
下面就给出最大稳定极值区域检测的应用实例:
- #include "opencv2/core/core.hpp"
- #include "opencv2/highgui/highgui.hpp"
- #include "opencv2/imgproc/imgproc.hpp"
- #include <opencv2/features2d/features2d.hpp>
- #include <iostream>
- using namespace cv;
- using namespace std;
- int main(int argc, char *argv[])
- {
- Mat src,gray;
- src = imread("lenna.bmp");
- cvtColor( src, gray, CV_BGR2GRAY );
- //创建MSER类
- MSER ms;
- //用于组块区域的像素点集
- vector<vector<Point>> regions;
- ms(gray, regions, Mat());
- //在灰度图像中用椭圆形绘制组块
- for (int i = 0; i < regions.size(); i++)
- {
- ellipse(gray, fitEllipse(regions[i]), Scalar(255));
- }
- imshow("mser", gray);
- waitKey(0);
- return 0;
- }