opencv利用cvCalcHist获得手的肤色直方图的比较汇总
1)cvNormalizeHist:直方图归一化
cvNormalizeHist(CvHistogram * hist, double factor);
hist:表示直方图
factor:表示直方图归一化以后的数值(通常情况下设置为1)。这里它是一个double类型的数据,尽管函数CvHistogram 的内部数据类型通常都是float类型。
2)cvThreshHist:直方图阀值化
cvThreshHist(CvHistogram * hist, double factor);
hist:表示直方图
factor:是一个开关阀值。进行直方图阀值化处理之后,小于给定阀值的各个bin的值都被设为0。
3)cvCopyHist:复制直方图
void cvCopyHist(const CvHistogram * src, CvHistogram * * dst);
将一个直方图的信息复制到另一个直方图中。
第二个参数是指向直方图的指针的指针。
4)cvGetMinMaxHistValue:输出直方图中找到的最大值和最小值
void cvGetMinMaxHistValue(const CvHistogram * hist, float * min_value, float * max_value,
int * min_idx = NULL, int * max_idx = NULL);
hist
直方图
min_value
直方图最小值的指针
max_value
直方图最大值的指针
min_idx
数组中最小坐标的指针
max_idx
数组中最大坐标的指针
函数 cvGetMinMaxHistValue 发现最大和最小直方块以及它们的位置。任何输出变量都是可选的。在具有同样值几个极值中,返回具有最小下标索引(以字母排列顺序定)的那一个。
5)cvCalcHist:计算图像image(s)像素点 的直方图
void cvCalcHist( IplImage** image, CvHistogram* hist,
int accumulate=0, const CvArr* mask=NULL );
image
输入图像s (虽然也可以使用 CvMat** ),这允许利用多个图像通道,对于多通道图像(如HSV或RGB),在调用函数cvCalcHist之前,先要用函数cvSplit()将图像分为单通道的。
hist
直方图指针
accumulate
累计标识。如果设置非0,则表示直方图在开始时没有被清零。注意,变量accumulate 允许cvCalcHist在一个数据采集循环中被多次调用。这个特征保证可以为多个图像计算一个单独的直方图,或者在线更新直方图。
mask
操作 mask, 确定输入图像的哪个象素被计数
函数 cvCalcHist 计算单通道或多通道图像的直方图。 用来增加直方块的数组元素可从相应输入图像的同样位置提取。
6)cvCompareHist:比较两个直方图的相似度
double cvCompareHist(const CvHistogram * hist1,
const CvHistogram * hist2, int method);
前两个参数是要比较的大小相同的直方图,第三个参数是所选择的距离标准。

可以看作cvSplit是他的宏:
#define cvCvtPixToPlane cvSplit void cvSplit( const CvArr* src, CvArr* dst0, CvArr* dst1,CvArr* dst2, CvArr* dst3 );
一般用法是cvCvtPixToPlane(IplImage * src,IplImage * dst1,IplImage *dst2,IplImage * dst3,IplImage *dst4) 第一个参数是源图像,后面是分离出来每个通道的目标图像,如果原图像是3通道的,可以把最后一个参数设置为空。例如cvCvtPixToPlane(IplImage * src,IplImage * dst1,IplImage *dst2,IplImage * dst3,NULL),NULL也可以写为0.代码:
#include <cv.h>
#include <highgui.h>
#include <iostream>
#include <opencv2/legacy/legacy.hpp>
using namespace cv;
using namespace std;
CvHistogram * Create3DHistogram(const int dims, int bins);
void CreateSingleImage(IplImage * image_Src, IplImage **image_r, IplImage **image_g, IplImage **image_b);
void DrawHistogram(IplImage ** image_hist, const CvHistogram * histogram, int scaleValue);
int main()
{
const char * soutceFile_InDoor = "D:\\VC98\\C++项目\\opencv\\page244.2_\\page244.2_\\hand2.jpg";
const char * soutceFile_OutDoor = "D:\\VC98\\C++项目\\opencv\\page244.2_\\page244.2_\\hand3.jpg";
const char * soutceFile_OutDoorSun = "D:\\VC98\\C++项目\\opencv\\page244.2_\\page244.2_\\hand4.jpg";
IplImage * image_Source_Indoor = cvLoadImage(soutceFile_InDoor, CV_LOAD_IMAGE_UNCHANGED);
assert(image_Source_Indoor);
IplImage * image_Source_Outdoor = cvLoadImage(soutceFile_OutDoor, CV_LOAD_IMAGE_UNCHANGED);
assert(image_Source_Outdoor);
IplImage * image_Source_OutdoorSun = cvLoadImage(soutceFile_OutDoorSun, CV_LOAD_IMAGE_UNCHANGED);
assert(image_Source_OutdoorSun);
IplImage * image_r;
IplImage * image_g;
IplImage * image_b;
CvHistogram * histgram_3D_InDoor;
CvHistogram * histgram_3D_OutDoor;
CvHistogram * histgram_3D_OutDoorSun;
double histCompare;
const int dims = 3;//3维
int bin_N[] = { 2, 8, 16, 32, 256 };
size_t length_bin_N = sizeof(bin_N) / sizeof(bin_N[0]);//typedef _W64 unsigned int size_t;
for (size_t i = 0; i < length_bin_N; ++i)
{
//室内直方图
CreateSingleImage(image_Source_Indoor, &image_r, &image_g, &image_b);//创建一个3维直方图
//分割多通道数组成几个单通道数组或者从数组中提取一个通道
cvCvtPixToPlane(image_Source_Indoor, image_r, image_g, image_b, NULL);
IplImage *allImagePlane[3] = { image_r, image_g, image_b };//用一个数组来存放3个通道图像
histgram_3D_InDoor = Create3DHistogram(dims, bin_N[i]);//创建一个3维直方图
cvCalcHist(allImagePlane, histgram_3D_InDoor);//计算直方图的总像素点
cvNormalizeHist(histgram_3D_InDoor, 1.0);//归一化
cvReleaseImage(&image_r);
cvReleaseImage(&image_g);
cvReleaseImage(&image_b);
//室外直方图
CreateSingleImage(image_Source_Outdoor, &image_r, &image_g, &image_b);
cvCvtPixToPlane(image_Source_Outdoor, image_r, image_g, image_b, NULL);
allImagePlane[0] = image_r;
allImagePlane[1] = image_g;
allImagePlane[2] = image_b;
histgram_3D_OutDoor = Create3DHistogram(dims, bin_N[i]);
cvCalcHist(allImagePlane, histgram_3D_OutDoor);//计算直方图的总像素点
cvNormalizeHist(histgram_3D_OutDoor, 1.0);//归一化直方图
cvReleaseImage(&image_r);
cvReleaseImage(&image_g);
cvReleaseImage(&image_b);
//室外阳光直方图
CreateSingleImage(image_Source_OutdoorSun, &image_r, &image_g, &image_b);//这里复杂,要细看
//分割多通道数组成几个单通道数组或者从数组中提取一个通道
cvCvtPixToPlane(image_Source_OutdoorSun, image_r, image_g, image_b, NULL);
allImagePlane[0] = image_r;
allImagePlane[1] = image_g;
allImagePlane[2] = image_b;
histgram_3D_OutDoorSun = Create3DHistogram(dims, bin_N[i]);
cvCalcHist(allImagePlane, histgram_3D_OutDoorSun);
cvNormalizeHist(histgram_3D_OutDoorSun, 1.0);
cvReleaseImage(&image_r);
cvReleaseImage(&image_g);
cvReleaseImage(&image_b);
if (bin_N[i] == 8)
{
cvNamedWindow("bin等于8时的室内直方图", CV_WINDOW_AUTOSIZE);
cvNamedWindow("bin等于8时的室外直方图", CV_WINDOW_AUTOSIZE);
cvNamedWindow("bin等于8时的室外阳光直方图", CV_WINDOW_AUTOSIZE);
IplImage *histImage_Indoor;
IplImage *histImage_Outdoor;
IplImage *histImage_OutdoorSun;
DrawHistogram(&histImage_Indoor, histgram_3D_InDoor, 1000);
cvShowImage("bin等于8时的室内直方图", histImage_Indoor);
cvSaveImage("result1.jpg",histImage_Indoor);
cvReleaseImage(&histImage_Indoor);
DrawHistogram(&histImage_Outdoor, histgram_3D_OutDoor, 1000);
cvShowImage("bin等于8时的室外直方图", histImage_Outdoor);
cvSaveImage("result2.jpg",histImage_Outdoor);
cvReleaseImage(&histImage_Outdoor);
DrawHistogram(&histImage_OutdoorSun, histgram_3D_OutDoorSun, 1000);
cvShowImage("bin等于8时的室外阳光直方图", histImage_OutdoorSun);
cvSaveImage("result3.jpg",histImage_OutdoorSun);
cvReleaseImage(&histImage_OutdoorSun);
}
//输出匹配结果
cout << "-- bin为"<<bin_N[i]<<" -- " << endl;
cout << "===============================================================================" << endl;
cout << "CV_COMP_CORREL方法:数值越大越匹配,范围:完全匹配:1,完全不匹配:-1,无关联:0" << endl;
cout << "-------------------------------------------------------------------------------" << endl;
histCompare = cvCompareHist(histgram_3D_InDoor, histgram_3D_OutDoor, CV_COMP_CORREL);
cout << "InDoor与OutDoor :" << histCompare << endl;
histCompare = cvCompareHist(histgram_3D_InDoor, histgram_3D_OutDoorSun, CV_COMP_CORREL);
cout << "InDoor与OutDoorSun :" << histCompare << endl;
histCompare = cvCompareHist(histgram_3D_OutDoor, histgram_3D_OutDoorSun, CV_COMP_CORREL);
cout << "OutDoor与OutDoorSun:" << histCompare << endl;
cout << endl;
cout << "CV_COMP_CHISQR方法:数值越小越匹配,范围:0到无穷大" << endl;
cout << "-------------------------------------------------------------------------------" << endl;
histCompare = cvCompareHist(histgram_3D_InDoor, histgram_3D_OutDoor, CV_COMP_CHISQR);
cout << "InDoor与OutDoor :" << histCompare << endl;
histCompare = cvCompareHist(histgram_3D_InDoor, histgram_3D_OutDoorSun, CV_COMP_CHISQR);
cout << "InDoor与OutDoorSun :" << histCompare << endl;
histCompare = cvCompareHist(histgram_3D_OutDoor, histgram_3D_OutDoorSun, CV_COMP_CHISQR);
cout << "OutDoor与OutDoorSun:" << histCompare << endl;
cout << endl;
cout << "CV_COMP_INTERSECT方法:低分代表坏的匹配,范围:如果两个直方图都被归一化到1,则0~1" << endl;
cout << "-------------------------------------------------------------------------------" << endl;
histCompare = cvCompareHist(histgram_3D_InDoor, histgram_3D_OutDoor, CV_COMP_INTERSECT);
cout << "InDoor与OutDoor :" << histCompare << endl;
histCompare = cvCompareHist(histgram_3D_InDoor, histgram_3D_OutDoorSun, CV_COMP_INTERSECT);
cout << "InDoor与OutDoorSun :" << histCompare << endl;
histCompare = cvCompareHist(histgram_3D_OutDoor, histgram_3D_OutDoorSun, CV_COMP_INTERSECT);
cout << "OutDoor与OutDoorSun:" << histCompare << endl;
cout << endl;
cout << "CV_COMP_BHATTACHARYYA方法:低分代表好的匹配,范围:0~1" << endl;
cout << "-------------------------------------------------------------------------------" << endl;
histCompare = cvCompareHist(histgram_3D_InDoor, histgram_3D_OutDoor, CV_COMP_BHATTACHARYYA);
cout << "InDoor与OutDoor :" << histCompare << endl;
histCompare = cvCompareHist(histgram_3D_InDoor, histgram_3D_OutDoorSun, CV_COMP_BHATTACHARYYA);
cout << "InDoor与OutDoorSun :" << histCompare << endl;
histCompare = cvCompareHist(histgram_3D_OutDoor, histgram_3D_OutDoorSun, CV_COMP_BHATTACHARYYA);
cout << "OutDoor与OutDoorSun:" << histCompare << endl;
cout << endl;
cout << endl;
cout << endl;
cvReleaseHist(&histgram_3D_InDoor);
cvReleaseHist(&histgram_3D_OutDoor);
cvReleaseHist(&histgram_3D_OutDoorSun);
}
//system("pause");
cvWaitKey();
cvReleaseImage(&image_Source_Indoor);
cvReleaseImage(&image_Source_Outdoor);
cvReleaseImage(&image_Source_OutdoorSun);
cvDestroyAllWindows();
return 0;
}
CvHistogram * Create3DHistogram(const int dims, int bins)//创建一个3维直方图
{
int hist_sizes[] = { bins, bins, bins };
int hist_type = CV_HIST_ARRAY;
float r_range[] = { 0, 255 };
float g_range[] = { 0, 255 };
float b_range[] = { 0, 255 };
float *hist_ranges[] = { r_range, g_range, b_range };
return cvCreateHist(dims, hist_sizes, hist_type, hist_ranges, 1);
}
void CreateSingleImage(IplImage * image_Src, IplImage **image_r, IplImage **image_g, IplImage **image_b)
{
IplImage * image_temp = cvCreateImage(cvGetSize(image_Src), IPL_DEPTH_8U, 1);
//image_r = &image_temp;
//如果用上面这行这种方式,编译通过,但运行崩溃,本函数结束后image_r便被释放,
//因为image_temp只是一个指针变量,占用四个字节的局部变量,对它取地址即&image_temp只是这个局部指针变量的地址,函数结束后自然释放掉
//但是,将使用下面这行:将image_temp指针变量所保存的地址赋值给“*image_r”,这个地址是从cvCreateImagere中turn出来的,自然不会随函数结束而释放
*image_r = image_temp;
*image_g = cvCloneImage(image_temp);
*image_b = cvCloneImage(image_temp);
cvZero(*image_r);
cvZero(*image_g);
cvZero(*image_b);
}
//目前只实现绘制三维直方图
void DrawHistogram(IplImage ** image_hist, const CvHistogram * histogram,int scaleValue)
{
//直方图:横坐标表示各个bin,纵坐标表示各个bin归一化后的值
int hist_dims = histogram->mat.dims;
int bin_size1, bin_size2, bin_size3;
if (hist_dims == 3)
{
bin_size1 = histogram->mat.dim[0].size;
bin_size2 = histogram->mat.dim[1].size;
bin_size3 = histogram->mat.dim[2].size;
}
else
{
return;
}
int bin_count = bin_size1*bin_size2*bin_size3;
float max_temp;
cvGetMinMaxHistValue(histogram, NULL, &max_temp);
int max_value = (int)(max_temp*scaleValue) + 1;
CvSize hist_imageSize = cvSize(bin_count, max_value);
*image_hist = cvCreateImage(hist_imageSize, IPL_DEPTH_8U, 1);
(*image_hist)->origin = 1;
cvZero(*image_hist);
int x;
int value;
for (int r = 0; r < bin_size1; ++r)
{
for (int g = 0; g < bin_size2; ++g)
{
for (int b = 0; b < bin_size3; ++b)
{
x = r*(bin_size1*bin_size2) + g*bin_size2 + b;
value = (int)(cvQueryHistValue_3D(histogram, r, g, b)*scaleValue);
/* if (value == 0)
{
value = 10;
}*/
cvRectangle(*image_hist, cvPoint(x, 0), cvPoint(x, value), cvScalar(255));
}
}
}
}
效果:
使用三种光照条件下的手的图像,利用cvCalcHist来获得直方图
a、获得图像HSV三维直方图
b、匹配三种光照条件下的直方图,使用所有的匹配方法,测试bin的值为2, 8, 16, 32, 256的情况
输入3种光照条件(依次为由暗到亮)下手的图像是:


由于原图太大了,无法上传,我把它们截图了上传。
匹配结果:
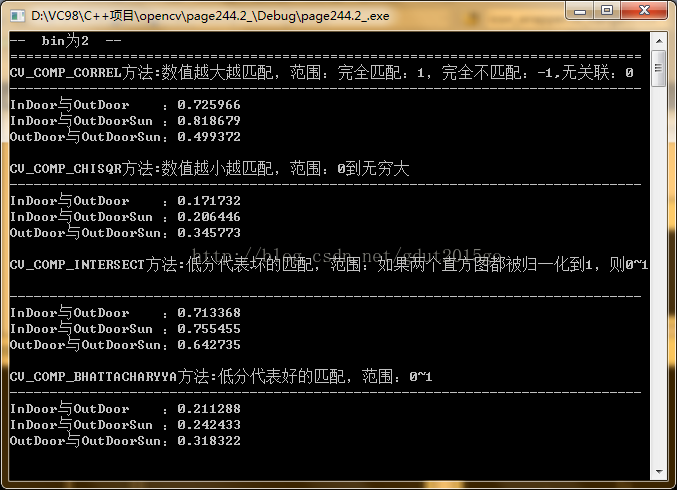 bin=2
bin=2
 bin=8
bin=8
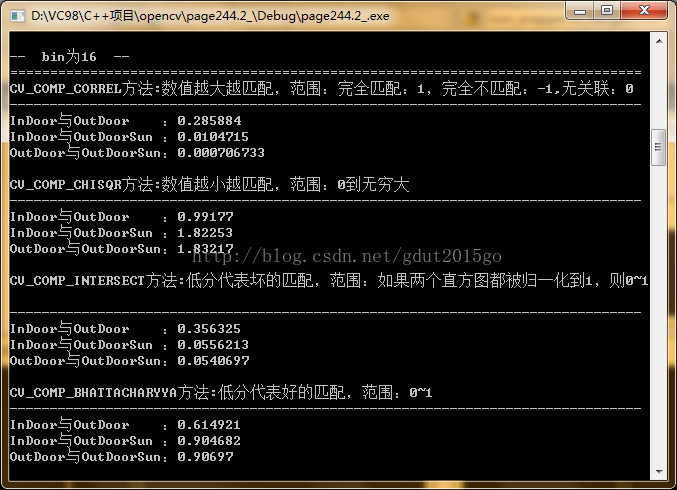 bin=16
bin=16
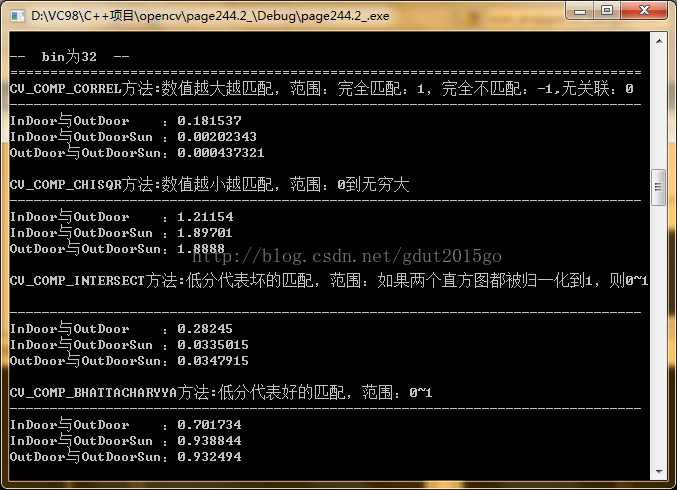 bin=32
bin=32
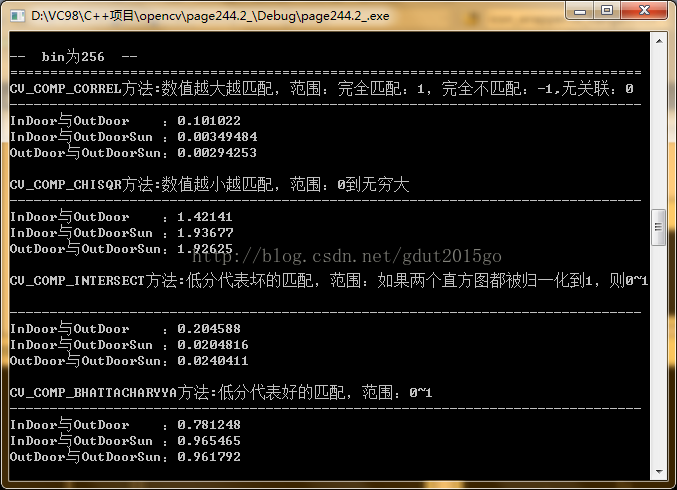 bin=256
bin=256
输出的直方图为:


有几个注意事项:
①二维直方图bin的多少是各维度bin的乘积,以h和s二维直方图来说,如果h的bin的个数为30,s的bin的个数为32,则,二维直方图的bin的个数为30×32,访问的时候要使用cvQueryHistValue_2D。
②由于需要匹配“各种光线”下的直方图,所以,代码中将BGR图像转成了HSV图像 cvCvtColor(image_Source, image_HSV, CV_BGR2HSV);。
③书中Example 7-1统计的是HS直方图,即色调和饱和度,没有统计亮度,针对三种光线下的手的图像,如果统计亮度即V的直方图,三种环境下的匹配结果值肯定不匹配度很高。这点在230页有专门的讲解,为什么只选取HS两维而避开V维,是这个道理。
④为什么说是手的肤色直方图,从图7-6的表述来看,所谓肤色直方图即肤色所在图片的直方图,在英文版更看得出这个意思。
⑤一般情况下在对比直方图之前,都应该自行进行归一化操作,因为如果不归一化,像直方图相交等概念就没有任何意义(即使运行)。
(完)