相机标定之(2)相机模型中的四个坐标系以及相机标定的原理总结
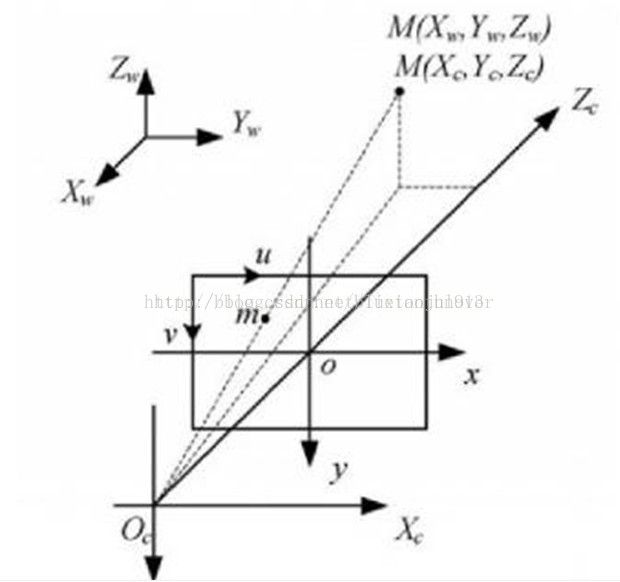
1. 相机模型中的四个平面坐标系:
(1)图像像素坐标系(u,v)
以像素为单位,是以图像的左上方为原点的图像坐标系;
(2)图像物理坐标系(也叫像平面坐标系)(x,y)
以毫米为单位,用物理单位表示图像像素位置,定义坐标系OXY,原点O定义在相机与图像平面交点;
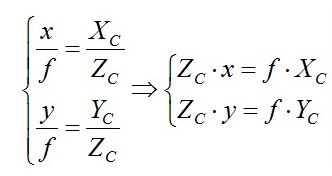
(3)相机坐标系(Xc,Yc,Zc)
以毫米为单位,以相机的光心作为原点,Zc轴与光轴重合,并垂直于成像平面,且取摄影方向为正方向,Xc、Yc轴 与图像物理坐标系的x,y轴平行,且OcO为摄像机的焦距f;
(4)世界坐标系(Xw,Yw,Zw)
根据具体情况而定,该坐标系描述环境中任何物体的位置,根据具体情况而定,满足右手法则;
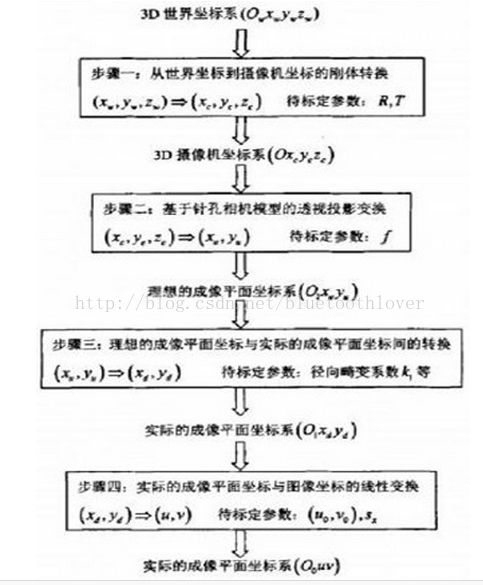
关于这几个坐标系解释很多,但是表示到完整的坐标系上的话都是一个东西,不必纠结,当然我纠结了好久 ········如图:
2.相机的内外参数
标定的主要目的就是求解相机参数。内容如下:
摄像机的内参数:摄像机内参数矩阵(fx,fy,u0,v0)和畸变系数(三个径向k1,k2,k3,两个切向p1,p2)
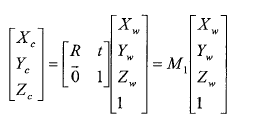
摄像机的外参数: 旋转向量(大小为1×3的矢量或旋转矩阵3×3)和平移向量(Tx,Ty,Tz)。
3.常用坐标系之间的转换
3.1 像素坐标与像平面坐标系之间的转换
由上述相机坐标模型可以得到如下关系:

(1)
上述公式中我们假设物理坐标系中的单位为毫米,那么dx的的单位为:毫米/像素。那么x/dx的单位就是像素了,即和u的单位一样都是像素,u0 ,v0是图像中心(光轴与图像平面的交点)坐标,dx ,dy分别为一个像素在X 与Y 方向上的物理尺寸.上式表示为齐次坐标与矩阵形式表示出来即为:
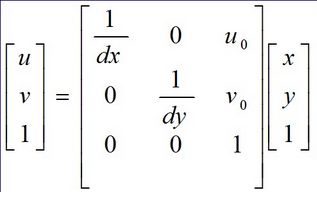
(2)
其逆关系可表示为:

(3)





http://wenku.baidu.com/link?url=jsw3VjRX7XUcrm4Uqrz5HxCWfh8gTgUz5-Zp5A0AF_N5uzHmj24ds9lsF1TbZPYlhIwyEwol7cD204pZ4CyuColBBtiqmSOObT_uTJM_m3y