OpenCV边缘检测
【OpenCV入门教程之十二】OpenCV边缘检测:Canny算子,Sobel算子,Laplace算子,Scharr滤波器合辑
目录(?)[+]
本系列文章由@浅墨_毛星云 出品,转载请注明出处。
文章链接: http://blog.csdn.net/poem_qianmo/article/details/25560901
作者:毛星云(浅墨) 微博:http://weibo.com/u/1723155442
知乎:http://www.zhihu.com/people/mao-xing-yun
写作当前博文时配套使用的OpenCV版本: 2.4.9
本篇文章中,我们将一起学习OpenCV中边缘检测的各种算子和滤波器——Canny算子,Sobel算子,Laplace算子以及Scharr滤波器。文章中包含了五个浅墨为大家准备的详细注释的博文配套源代码。在介绍四块知识点的时候分别一个,以及最后的综合示例中的一个。文章末尾提供配套源代码的下载。
依然是是放出一些程序运行截图吧:
效果图看完,我们来唠唠嗑。
首先,需要说明的是,浅墨这篇文章最后的示例代码是采用两周前刚刚发布的2.4.9来书写的。里面的lib都已经改成了2.4.9版本的。如果大家需要运行的话,要么配置好2.4.9.要么把浅墨在工程中包含的末尾数字为249的各种lib改成之前的248或者你对应的OpenCV版本。
不然会提示: LINK : fatal error LNK1181: 无法打开输入文件“opencv_calib3d248.lib”之类的错误。
OpenCV 2.4.9的配置和之前的2.4.8差不多,如果还是不太清楚,具体可以参考浅墨修改过的对应2.4.9版的配置文章:
【OpenCV入门教程之一】 安装OpenCV:OpenCV 2.4.8或2.4.9 +VS 开发环境配置
第二,给大家分享一个OpenCV中写代码时节约时间的小常识。其实OpenCV中,不用namedWindow,直接imshow就可以显示出窗口。大家看下文的示例代码就可以发现,浅墨在写代码的时候并没有用namedWindow,遇到想显示出来的Mat变量直接imshow。我们一般是为了规范,才先用namedWindow创建窗口,再imshow出它来,因为我们还有需要用到指定窗口名称的地方,比如用到trackbar的时候。而一般情况想显示一个Mat变量的图片的话,直接imshow就可以啦。
OK,开始正文吧~
一、关于边缘检测
在具体介绍之前,先来一起看看边缘检测的一般步骤吧。
1)滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和(具体程序实现见下文)。
2)增强:增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。在具体编程实现时,可通过计算梯度幅值来确定。
3)检测:经过增强的图像,往往邻域中有很多点的梯度值比较大,而在特定的应用中,这些点并不是我们要找的边缘点,所以应该采用某种方法来对这些点进行取舍。实际工程中,常用的方法是通过阈值化方法来检测。
另外,需要注意,下文中讲到的Laplace算子,sobel算子和Scharr算子都是带方向的,所以,示例中我们分别写了X方向,Y方向和最终合成的的效果图。
OK,正餐开始,召唤canny算子。:)
二、canny算子篇
2.1 canny算子相关理论与概念讲解

2.1.1 canny算子简介
Canny边缘检测算子是John F.Canny于 1986 年开发出来的一个多级边缘检测算法。更为重要的是 Canny 创立了边缘检测计算理论(Computational theory ofedge detection),解释了这项技术是如何工作的。Canny边缘检测算法以Canny的名字命名,被很多人推崇为当今最优的边缘检测的算法。
其中,Canny 的目标是找到一个最优的边缘检测算法,让我们看一下最优边缘检测的三个主要评价标准:
1.低错误率: 标识出尽可能多的实际边缘,同时尽可能的减少噪声产生的误报。
2.高定位性: 标识出的边缘要与图像中的实际边缘尽可能接近。
3.最小响应: 图像中的边缘只能标识一次,并且可能存在的图像噪声不应标识为边缘。
为了满足这些要求 Canny 使用了变分法,这是一种寻找满足特定功能的函数的方法。最优检测使用四个指数函数项的和表示,但是它非常近似于高斯函数的一阶导数。
2.1.2 Canny 边缘检测的步骤
1.消除噪声。 一般情况下,使用高斯平滑滤波器卷积降噪。 如下显示了一个 size = 5 的高斯内核示例:
2.计算梯度幅值和方向。 此处,按照Sobel滤波器的步骤。
Ⅰ.运用一对卷积阵列 (分别作用于 x 和 y 方向):
Ⅱ.使用下列公式计算梯度幅值和方向:
梯度方向近似到四个可能角度之一(一般为0, 45, 90, 135)
3.非极大值抑制。 这一步排除非边缘像素, 仅仅保留了一些细线条(候选边缘)。
4.滞后阈值。最后一步,Canny 使用了滞后阈值,滞后阈值需要两个阈值(高阈值和低阈值):



Ⅰ.如果某一像素位置的幅值超过 高 阈值, 该像素被保留为边缘像素。
Ⅱ.如果某一像素位置的幅值小于 低 阈值, 该像素被排除。
Ⅲ.如果某一像素位置的幅值在两个阈值之间,该像素仅仅在连接到一个高于 高 阈值的像素时被保留。
tips:对于Canny函数的使用,推荐的高低阈值比在2:1到3:1之间。
更多的细节,可以参考canny算子的wikipedia:
http://en.wikipedia.org/wiki/Canny_edge_detector
canny边缘检测的原理讲述,课参看这篇博文:
http://blog.csdn.net/likezhaobin/article/details/6892176
canny算子的中文wikipedia:
http://zh.wikipedia.org/wiki/Canny%E7%AE%97%E5%AD%90
2.2 OpenCV中Canny函数详解
Canny函数利用Canny算法来进行图像的边缘检测。
- C++: void Canny(InputArray image,OutputArray edges, double threshold1, double threshold2, int apertureSize=3,bool L2gradient=false )
- 第一个参数,InputArray类型的image,输入图像,即源图像,填Mat类的对象即可,且需为单通道8位图像。
- 第二个参数,OutputArray类型的edges,输出的边缘图,需要和源图片有一样的尺寸和类型。
- 第三个参数,double类型的threshold1,第一个滞后性阈值。
- 第四个参数,double类型的threshold2,第二个滞后性阈值。
- 第五个参数,int类型的apertureSize,表示应用Sobel算子的孔径大小,其有默认值3。
- 第六个参数,bool类型的L2gradient,一个计算图像梯度幅值的标识,有默认值false。
需要注意的是,这个函数阈值1和阈值2两者的小者用于边缘连接,而大者用来控制强边缘的初始段,推荐的高低阈值比在2:1到3:1之间。
调用示例:
- //载入原始图
- Mat src = imread("1.jpg"); //工程目录下应该有一张名为1.jpg的素材图
- Canny(src, src, 3, 9,3 );
- imshow("【效果图】Canny边缘检测", src);
如上三句,就有结果出来,非常好用。
2.3 调用Canny函数的实例代码
OpenCV中调用Canny函数的实例代码如下:
- //-----------------------------------【头文件包含部分】---------------------------------------
- // 描述:包含程序所依赖的头文件
- //----------------------------------------------------------------------------------------------
- #include <opencv2/opencv.hpp>
- #include<opencv2/highgui/highgui.hpp>
- #include<opencv2/imgproc/imgproc.hpp>
- //-----------------------------------【命名空间声明部分】---------------------------------------
- // 描述:包含程序所使用的命名空间
- //-----------------------------------------------------------------------------------------------
- using namespace cv;
- //-----------------------------------【main( )函数】--------------------------------------------
- // 描述:控制台应用程序的入口函数,我们的程序从这里开始
- //-----------------------------------------------------------------------------------------------
- int main( )
- {
- //载入原始图
- Mat src = imread("1.jpg"); //工程目录下应该有一张名为1.jpg的素材图
- Mat src1=src.clone();
- //显示原始图
- imshow("【原始图】Canny边缘检测", src);
- //----------------------------------------------------------------------------------
- // 一、最简单的canny用法,拿到原图后直接用。
- //----------------------------------------------------------------------------------
- Canny( src, src, 150, 100,3 );
- imshow("【效果图】Canny边缘检测", src);
- //----------------------------------------------------------------------------------
- // 二、高阶的canny用法,转成灰度图,降噪,用canny,最后将得到的边缘作为掩码,拷贝原图到效果图上,得到彩色的边缘图
- //----------------------------------------------------------------------------------
- Mat dst,edge,gray;
- // 【1】创建与src同类型和大小的矩阵(dst)
- dst.create( src1.size(), src1.type() );
- // 【2】将原图像转换为灰度图像
- cvtColor( src1, gray, CV_BGR2GRAY );
- // 【3】先用使用 3x3内核来降噪
- blur( gray, edge, Size(3,3) );
- // 【4】运行Canny算子
- Canny( edge, edge, 3, 9,3 );
- //【5】将g_dstImage内的所有元素设置为0
- dst = Scalar::all(0);
- //【6】使用Canny算子输出的边缘图g_cannyDetectedEdges作为掩码,来将原图g_srcImage拷到目标图g_dstImage中
- src1.copyTo( dst, edge);
- //【7】显示效果图
- imshow("【效果图】Canny边缘检测2", dst);
- waitKey(0);
- return 0;
- }
运行效果图:
三、sobel算子篇
3.1 sobel算子相关理论与概念讲解
3.1.1 基本概念
Sobel 算子是一个主要用作边缘检测的离散微分算子 (discrete differentiation operator)。 它Sobel算子结合了高斯平滑和微分求导,用来计算图像灰度函数的近似梯度。在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量。
sobel算子的wikipedia:
http://zh.wikipedia.org/wiki/%E7%B4%A2%E8%B2%9D%E7%88%BE%E7%AE%97%E5%AD%90
sobel算子相关概念,还可以参看这篇博文:
http://www.cnblogs.com/lancidie/archive/2011/07/17/2108885.html
3.1.2 sobel算子的计算过程
我们假设被作用图像为 I.然后进行如下的操作:
1.分别在x和y两个方向求导。
Ⅰ.水平变化: 将 I 与一个奇数大小的内核
进行卷积。比如,当内核大小为3时,
Ⅱ.垂直变化: 将: I 与一个奇数大小的内核
进行卷积。比如,当内核大小为3时,
2.在图像的每一点,结合以上两个结果求出近似梯度:
另外有时,也可用下面更简单公式代替:






3.2 OpenCV中Sobel函数详解
Sobel函数使用扩展的 Sobel 算子,来计算一阶、二阶、三阶或混合图像差分。
- C++: void Sobel (
- InputArray src,//输入图
- OutputArray dst,//输出图
- int ddepth,//输出图像的深度
- int dx,
- int dy,
- int ksize=3,
- double scale=1,
- double delta=0,
- int borderType=BORDER_DEFAULT );
- 第一个参数,InputArray 类型的src,为输入图像,填Mat类型即可。
- 第二个参数,OutputArray类型的dst,即目标图像,函数的输出参数,需要和源图片有一样的尺寸和类型。
- 第三个参数,int类型的ddepth,输出图像的深度,支持如下src.depth()和ddepth的组合:
- 若src.depth() = CV_8U, 取ddepth =-1/CV_16S/CV_32F/CV_64F
- 若src.depth() = CV_16U/CV_16S, 取ddepth =-1/CV_32F/CV_64F
- 若src.depth() = CV_32F, 取ddepth =-1/CV_32F/CV_64F
- 若src.depth() = CV_64F, 取ddepth = -1/CV_64F
- 第四个参数,int类型dx,x 方向上的差分阶数。
- 第五个参数,int类型dy,y方向上的差分阶数。
- 第六个参数,int类型ksize,有默认值3,表示Sobel核的大小;必须取1,3,5或7。
- 第七个参数,double类型的scale,计算导数值时可选的缩放因子,默认值是1,表示默认情况下是没有应用缩放的。我们可以在文档中查阅getDerivKernels的相关介绍,来得到这个参数的更多信息。
- 第八个参数,double类型的delta,表示在结果存入目标图(第二个参数dst)之前可选的delta值,有默认值0。
- 第九个参数, int类型的borderType,我们的老朋友了(万年是最后一个参数),边界模式,默认值为BORDER_DEFAULT。这个参数可以在官方文档中borderInterpolate处得到更详细的信息。
一般情况下,都是用ksize x ksize内核来计算导数的。然而,有一种特殊情况——当ksize为1时,往往会使用3 x 1或者1 x 3的内核。且这种情况下,并没有进行高斯平滑操作。
一些补充说明:
1.当内核大小为 3 时, 我们的Sobel内核可能产生比较明显的误差(毕竟,Sobel算子只是求取了导数的近似值而已)。 为解决这一问题,OpenCV提供了Scharr 函数,但该函数仅作用于大小为3的内核。该函数的运算与Sobel函数一样快,但结果却更加精确,其内核是这样的:
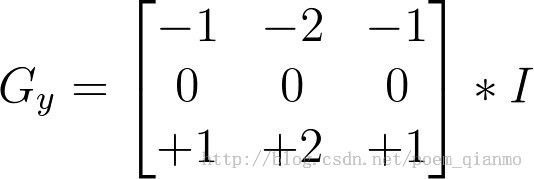
2.因为Sobel算子结合了高斯平滑和分化(differentiation),因此结果会具有更多的抗噪性。大多数情况下,我们使用sobel函数时,取【xorder = 1,yorder = 0,ksize = 3】来计算图像X方向的导数,【xorder = 0,yorder = 1,ksize = 3】来计算图像y方向的导数。
计算图像X方向的导数,取【xorder= 1,yorder = 0,ksize = 3】情况对应的内核:


而计算图像Y方向的导数,取【xorder= 0,yorder = 1,ksize = 3】对应的内核:

3.3 调用Sobel函数的实例代码
调用Sobel函数的实例代码如下。这里只是教大家如何使用Sobel函数,就没有先用一句cvtColor将原图;转化为灰度图,而是直接用彩色图操作。
- //-----------------------------------【头文件包含部分】---------------------------------------
- // 描述:包含程序所依赖的头文件
- //----------------------------------------------------------------------------------------------
- #include <opencv2/opencv.hpp>
- #include<opencv2/highgui/highgui.hpp>
- #include<opencv2/imgproc/imgproc.hpp>
- //-----------------------------------【命名空间声明部分】---------------------------------------
- // 描述:包含程序所使用的命名空间
- //-----------------------------------------------------------------------------------------------
- using namespace cv;
- //-----------------------------------【main( )函数】--------------------------------------------
- // 描述:控制台应用程序的入口函数,我们的程序从这里开始
- //-----------------------------------------------------------------------------------------------
- int main( )
- {
- //【0】创建 grad_x 和 grad_y 矩阵
- Mat grad_x, grad_y;
- Mat abs_grad_x, abs_grad_y,dst;
- //【1】载入原始图
- Mat src = imread("1.jpg"); //工程目录下应该有一张名为1.jpg的素材图
- //【2】显示原始图
- imshow("【原始图】sobel边缘检测", src);
- //【3】求 X方向梯度
- Sobel( src, grad_x, CV_16S, 1, 0, 3, 1, 1, BORDER_DEFAULT );
- convertScaleAbs( grad_x, abs_grad_x );
- imshow("【效果图】 X方向Sobel", abs_grad_x);
- //【4】求Y方向梯度
- Sobel( src, grad_y, CV_16S, 0, 1, 3, 1, 1, BORDER_DEFAULT );
- convertScaleAbs( grad_y, abs_grad_y );
- imshow("【效果图】Y方向Sobel", abs_grad_y);
- //【5】合并梯度(近似)
- addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, dst );
- imshow("【效果图】整体方向Sobel", dst);
- waitKey(0);
- return 0;
- }
运行截图如下:
四、Laplace算子篇
4.1 Laplace算子相关理论与概念讲解
Laplacian 算子是n维欧几里德空间中的一个二阶微分算子,定义为梯度grad()的散度div()。因此如果f是二阶可微的实函数,则f的拉普拉斯算子定义为:
(1) f的拉普拉斯算子也是笛卡儿坐标系xi中的所有非混合二阶偏导数求和:
(2) 作为一个二阶微分算子,拉普拉斯算子把C函数映射到C函数,对于k ≥ 2。表达式(1)(或(2))定义了一个算子Δ :C(R) → C(R),或更一般地,定义了一个算子Δ : C(Ω) → C(Ω),对于任何开集Ω。
根据图像处理的原理我们知道,二阶导数可以用来进行检测边缘 。 因为图像是 “二维”, 我们需要在两个方向进行求导。使用Laplacian算子将会使求导过程变得简单。
Laplacian 算子的定义:

需要点破的是,由于 Laplacian使用了图像梯度,它内部的代码其实是调用了 Sobel 算子的。
另附一个小tips:让一幅图像减去它的Laplacian可以增强对比度。
关于Laplace算子的相关概念阐述,可以参看这篇博文:
http://www.cnblogs.com/xfzhang/archive/2011/01/19/1939020.html
Laplace算子的wikipedia:
http://zh.wikipedia.org/wiki/%E6%8B%89%E6%99%AE%E6%8B%89%E6%96%AF%E7%AE%97%E5%AD%90
4.2 OpenCV中Laplacian函数详解
Laplacian函数可以计算出图像经过拉普拉斯变换后的结果。
- C++: void Laplacian(InputArray src,OutputArray dst, int ddepth, int ksize=1, double scale=1, double delta=0, intborderType=BORDER_DEFAULT );
- 第一个参数,InputArray类型的image,输入图像,即源图像,填Mat类的对象即可,且需为单通道8位图像。
- 第二个参数,OutputArray类型的edges,输出的边缘图,需要和源图片有一样的尺寸和通道数。
- 第三个参数,int类型的ddept,目标图像的深度。
- 第四个参数,int类型的ksize,用于计算二阶导数的滤波器的孔径尺寸,大小必须为正奇数,且有默认值1。
- 第五个参数,double类型的scale,计算拉普拉斯值的时候可选的比例因子,有默认值1。
- 第六个参数,double类型的delta,表示在结果存入目标图(第二个参数dst)之前可选的delta值,有默认值0。
- 第七个参数, int类型的borderType,边界模式,默认值为BORDER_DEFAULT。这个参数可以在官方文档中borderInterpolate()处得到更详细的信息。
Laplacian( )函数其实主要是利用sobel算子的运算。它通过加上sobel算子运算出的图像x方向和y方向上的导数,来得到我们载入图像的拉普拉斯变换结果。
其中,sobel算子(ksize>1)如下:

而当ksize=1时,Laplacian()函数采用以下3x3的孔径:

4.3 调用Laplacian函数的实例代码
让我们看一看调用实例:
- //-----------------------------------【头文件包含部分】---------------------------------------
- // 描述:包含程序所依赖的头文件
- //----------------------------------------------------------------------------------------------
- #include <opencv2/opencv.hpp>
- #include<opencv2/highgui/highgui.hpp>
- #include<opencv2/imgproc/imgproc.hpp>
- //-----------------------------------【命名空间声明部分】---------------------------------------
- // 描述:包含程序所使用的命名空间
- //-----------------------------------------------------------------------------------------------
- using namespace cv;
- //-----------------------------------【main( )函数】--------------------------------------------
- // 描述:控制台应用程序的入口函数,我们的程序从这里开始
- //-----------------------------------------------------------------------------------------------
- int main( )
- {
- //【0】变量的定义
- Mat src,src_gray,dst, abs_dst;
- //【1】载入原始图
- src = imread("1.jpg"); //工程目录下应该有一张名为1.jpg的素材图
- //【2】显示原始图
- imshow("【原始图】图像Laplace变换", src);
- //【3】使用高斯滤波消除噪声
- GaussianBlur( src, src, Size(3,3), 0, 0, BORDER_DEFAULT );
- //【4】转换为灰度图
- cvtColor( src, src_gray, CV_RGB2GRAY );
- //【5】使用Laplace函数
- Laplacian( src_gray, dst, CV_16S, 3, 1, 0, BORDER_DEFAULT );
- //【6】计算绝对值,并将结果转换成8位
- convertScaleAbs( dst, abs_dst );
- //【7】显示效果图
- imshow( "【效果图】图像Laplace变换", abs_dst );
- waitKey(0);
- return 0;
- }
示例效果图:
五、scharr滤波器篇
scharr一般我就直接称它为滤波器,而不是算子。上文我们已经讲到,它在OpenCV中主要是配合Sobel算子的运算而存在的,一个万年备胎。让我们直接来看看函数讲解吧。
5.1 OpenCV中Scharr函数详解
使用Scharr滤波器运算符计算x或y方向的图像差分。其实它的参数变量和Sobel基本上是一样的,除了没有ksize核的大小。
- C++: void Scharr(
- InputArray src, //源图
- OutputArray dst, //目标图
- int ddepth,//图像深度
- int dx,// x方向上的差分阶数
- int dy,//y方向上的差分阶数
- double scale=1,//缩放因子
- double delta=0,// delta值
- intborderType=BORDER_DEFAULT )// 边界模式
- 第一个参数,InputArray 类型的src,为输入图像,填Mat类型即可。
- 第二个参数,OutputArray类型的dst,即目标图像,函数的输出参数,需要和源图片有一样的尺寸和类型。
- 第三个参数,int类型的ddepth,输出图像的深度,支持如下src.depth()和ddepth的组合:
- 若src.depth() = CV_8U, 取ddepth =-1/CV_16S/CV_32F/CV_64F
- 若src.depth() = CV_16U/CV_16S, 取ddepth =-1/CV_32F/CV_64F
- 若src.depth() = CV_32F, 取ddepth =-1/CV_32F/CV_64F
- 若src.depth() = CV_64F, 取ddepth = -1/CV_64F
- 第四个参数,int类型dx,x方向上的差分阶数。
- 第五个参数,int类型dy,y方向上的差分阶数。
- 第六个参数,double类型的scale,计算导数值时可选的缩放因子,默认值是1,表示默认情况下是没有应用缩放的。我们可以在文档中查阅getDerivKernels的相关介绍,来得到这个参数的更多信息。
- 第七个参数,double类型的delta,表示在结果存入目标图(第二个参数dst)之前可选的delta值,有默认值0。
- 第八个参数, int类型的borderType,我们的老朋友了(万年是最后一个参数),边界模式,默认值为BORDER_DEFAULT。这个参数可以在官方文档中borderInterpolate处得到更详细的信息。

不难理解,如下两者是等价的:
- Scharr(src, dst, ddepth, dx, dy, scale,delta, borderType);
与
- Sobel(src, dst, ddepth, dx, dy, CV_SCHARR,scale, delta, borderType);
5.2 调用Scharr函数的实例代码
- //-----------------------------------【头文件包含部分】---------------------------------------
- // 描述:包含程序所依赖的头文件
- //----------------------------------------------------------------------------------------------
- #include <opencv2/opencv.hpp>
- #include<opencv2/highgui/highgui.hpp>
- #include<opencv2/imgproc/imgproc.hpp>
- //-----------------------------------【命名空间声明部分】---------------------------------------
- // 描述:包含程序所使用的命名空间
- //-----------------------------------------------------------------------------------------------
- using namespace cv;
- //-----------------------------------【main( )函数】--------------------------------------------
- // 描述:控制台应用程序的入口函数,我们的程序从这里开始
- //-----------------------------------------------------------------------------------------------
- int main( )
- {
- //【0】创建 grad_x 和 grad_y 矩阵
- Mat grad_x, grad_y;
- Mat abs_grad_x, abs_grad_y,dst;
- //【1】载入原始图
- Mat src = imread("1.jpg"); //工程目录下应该有一张名为1.jpg的素材图
- //【2】显示原始图
- imshow("【原始图】Scharr滤波器", src);
- //【3】求 X方向梯度
- Scharr( src, grad_x, CV_16S, 1, 0, 1, 0, BORDER_DEFAULT );
- convertScaleAbs( grad_x, abs_grad_x );
- imshow("【效果图】 X方向Scharr", abs_grad_x);
- //【4】求Y方向梯度
- Scharr( src, grad_y, CV_16S, 0, 1, 1, 0, BORDER_DEFAULT );
- convertScaleAbs( grad_y, abs_grad_y );
- imshow("【效果图】Y方向Scharr", abs_grad_y);
- //【5】合并梯度(近似)
- addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, dst );
- //【6】显示效果图
- imshow("【效果图】合并梯度后Scharr", dst);
- waitKey(0);
- return 0;
- }
运行效果图:
六、综合示例篇——在实战中熟稔
依然是每篇文章都会配给大家的一个详细注释的博文配套示例程序,把这篇文章中介绍的知识点以代码为载体,展现给大家。
这个示例程序中,分别演示了canny边缘检测,sobel边缘检测,scharr滤波器的使用,那么,上详细注释的代码吧:
- //-----------------------------------【程序说明】----------------------------------------------
- // 程序名称::《【OpenCV入门教程之十二】OpenCV边缘检测:Canny算子,Sobel算子,Laplace算子,Scharr滤波器合辑合辑》 博文配套源码
- // 开发所用IDE版本:Visual Studio 2010
- // <span style="white-space:pre"> </span>开发所用OpenCV版本: 2.4.9
- // 2014年5月11日 Create by 浅墨
- // 浅墨的微博:@浅墨_毛星云 http://weibo.com/1723155442/profile?topnav=1&wvr=5&user=1
- // 浅墨的知乎:http://www.zhihu.com/people/mao-xing-yun
- // 浅墨的豆瓣:http://www.douban.com/people/53426472/
- //----------------------------------------------------------------------------------------------
- //-----------------------------------【头文件包含部分】---------------------------------------
- // 描述:包含程序所依赖的头文件
- //----------------------------------------------------------------------------------------------
- #include <opencv2/highgui/highgui.hpp>
- #include <opencv2/imgproc/imgproc.hpp>
- //-----------------------------------【命名空间声明部分】--------------------------------------
- // 描述:包含程序所使用的命名空间
- //-----------------------------------------------------------------------------------------------
- using namespace cv;
- //-----------------------------------【全局变量声明部分】--------------------------------------
- // 描述:全局变量声明
- //-----------------------------------------------------------------------------------------------
- //原图,原图的灰度版,目标图
- Mat g_srcImage, g_srcGrayImage,g_dstImage;
- //Canny边缘检测相关变量
- Mat g_cannyDetectedEdges;
- int g_cannyLowThreshold=1;//TrackBar位置参数
- //Sobel边缘检测相关变量
- Mat g_sobelGradient_X, g_sobelGradient_Y;
- Mat g_sobelAbsGradient_X, g_sobelAbsGradient_Y;
- int g_sobelKernelSize=1;//TrackBar位置参数
- //Scharr滤波器相关变量
- Mat g_scharrGradient_X, g_scharrGradient_Y;
- Mat g_scharrAbsGradient_X, g_scharrAbsGradient_Y;
- //-----------------------------------【全局函数声明部分】--------------------------------------
- // 描述:全局函数声明
- //-----------------------------------------------------------------------------------------------
- static void ShowHelpText( );
- static void on_Canny(int, void*);//Canny边缘检测窗口滚动条的回调函数
- static void on_Sobel(int, void*);//Sobel边缘检测窗口滚动条的回调函数
- void Scharr( );//封装了Scharr边缘检测相关代码的函数
- //-----------------------------------【main( )函数】--------------------------------------------
- // 描述:控制台应用程序的入口函数,我们的程序从这里开始
- //-----------------------------------------------------------------------------------------------
- int main( int argc, char** argv )
- {
- //改变console字体颜色
- system("color 2F");
- //显示欢迎语
- ShowHelpText();
- //载入原图
- g_srcImage = imread("1.jpg");
- if( !g_srcImage.data ) { printf("Oh,no,读取srcImage错误~! \n"); return false; }
- //显示原始图
- namedWindow("【原始图】");
- imshow("【原始图】", g_srcImage);
- // 创建与src同类型和大小的矩阵(dst)
- g_dstImage.create( g_srcImage.size(), g_srcImage.type() );
- // 将原图像转换为灰度图像
- cvtColor( g_srcImage, g_srcGrayImage, CV_BGR2GRAY );
- // 创建显示窗口
- namedWindow( "【效果图】Canny边缘检测", CV_WINDOW_AUTOSIZE );
- namedWindow( "【效果图】Sobel边缘检测", CV_WINDOW_AUTOSIZE );
- // 创建trackbar
- createTrackbar( "参数值:", "【效果图】Canny边缘检测", &g_cannyLowThreshold, 120, on_Canny );
- createTrackbar( "参数值:", "【效果图】Sobel边缘检测", &g_sobelKernelSize, 3, on_Sobel );
- // 调用回调函数
- on_Canny(0, 0);
- on_Sobel(0, 0);
- //调用封装了Scharr边缘检测代码的函数
- Scharr( );
- //轮询获取按键信息,若按下Q,程序退出
- while((char(waitKey(1)) != 'q')) {}
- return 0;
- }
- //-----------------------------------【ShowHelpText( )函数】----------------------------------
- // 描述:输出一些帮助信息
- //----------------------------------------------------------------------------------------------
- static void ShowHelpText()
- {
- //输出一些帮助信息
- printf( "\n\n\t嗯。运行成功,请调整滚动条观察图像效果~\n\n"
- "\t按下“q”键时,程序退出~!\n"
- "\n\n\t\t\t\t by浅墨" );
- }
- //-----------------------------------【on_Canny( )函数】----------------------------------
- // 描述:Canny边缘检测窗口滚动条的回调函数
- //-----------------------------------------------------------------------------------------------
- void on_Canny(int, void*)
- {
- // 先使用 3x3内核来降噪
- blur( g_srcGrayImage, g_cannyDetectedEdges, Size(3,3) );
- // 运行我们的Canny算子
- Canny( g_cannyDetectedEdges, g_cannyDetectedEdges, g_cannyLowThreshold, g_cannyLowThreshold*3, 3 );
- //先将g_dstImage内的所有元素设置为0
- g_dstImage = Scalar::all(0);
- //使用Canny算子输出的边缘图g_cannyDetectedEdges作为掩码,来将原图g_srcImage拷到目标图g_dstImage中
- g_srcImage.copyTo( g_dstImage, g_cannyDetectedEdges);
- //显示效果图
- imshow( "【效果图】Canny边缘检测", g_dstImage );
- }
- //-----------------------------------【on_Sobel( )函数】----------------------------------
- // 描述:Sobel边缘检测窗口滚动条的回调函数
- //-----------------------------------------------------------------------------------------
- void on_Sobel(int, void*)
- {
- // 求 X方向梯度
- Sobel( g_srcImage, g_sobelGradient_X, CV_16S, 1, 0, (2*g_sobelKernelSize+1), 1, 1, BORDER_DEFAULT );
- convertScaleAbs( g_sobelGradient_X, g_sobelAbsGradient_X );//计算绝对值,并将结果转换成8位
- // 求Y方向梯度
- Sobel( g_srcImage, g_sobelGradient_Y, CV_16S, 0, 1, (2*g_sobelKernelSize+1), 1, 1, BORDER_DEFAULT );
- convertScaleAbs( g_sobelGradient_Y, g_sobelAbsGradient_Y );//计算绝对值,并将结果转换成8位
- // 合并梯度
- addWeighted( g_sobelAbsGradient_X, 0.5, g_sobelAbsGradient_Y, 0.5, 0, g_dstImage );
- //显示效果图
- imshow("【效果图】Sobel边缘检测", g_dstImage);
- }
- //-----------------------------------【Scharr( )函数】----------------------------------
- // 描述:封装了Scharr边缘检测相关代码的函数
- //-----------------------------------------------------------------------------------------
- void Scharr( )
- {
- // 求 X方向梯度
- Scharr( g_srcImage, g_scharrGradient_X, CV_16S, 1, 0, 1, 0, BORDER_DEFAULT );
- convertScaleAbs( g_scharrGradient_X, g_scharrAbsGradient_X );//计算绝对值,并将结果转换成8位
- // 求Y方向梯度
- Scharr( g_srcImage, g_scharrGradient_Y, CV_16S, 0, 1, 1, 0, BORDER_DEFAULT );
- convertScaleAbs( g_scharrGradient_Y, g_scharrAbsGradient_Y );//计算绝对值,并将结果转换成8位
- // 合并梯度
- addWeighted( g_scharrAbsGradient_X, 0.5, g_scharrAbsGradient_Y, 0.5, 0, g_dstImage );
- //显示效果图
- imshow("【效果图】Scharr滤波器", g_dstImage);
- }
放出一些运行效果图:
canny边缘检测效果图:
Sobel边缘检测:
Scharr滤波器:
好的,就放出这些效果图吧,具体更多的运行效果大家就自己下载示例程序回去玩~
本篇文章的配套源代码请点击这里下载:
【浅墨OpenCV入门教程之十二】配套源代码下载
OK,今天的内容大概就是这些,我们下篇文章见:)






