MPU6050 6DOF 数据读取
MPU6050 三轴加速度陀螺仪模块
1)如何根据读出的值计算重力加速度
官方给的文档如下:
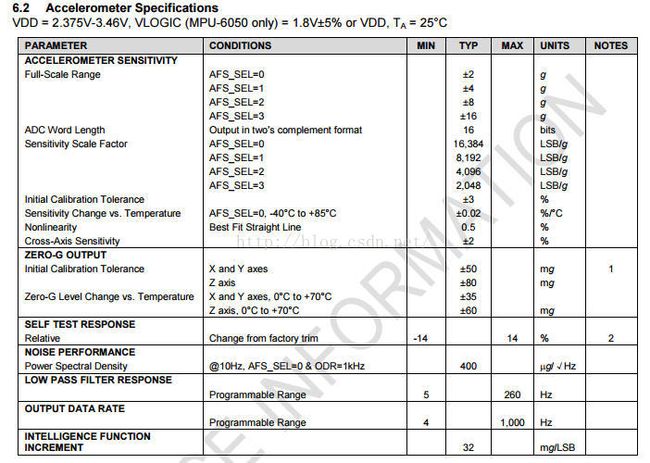
如果设置 1 (AFS_SEL=1) 量程式 +/- 2g (不是克,是重力加速度)
那么当你把MPU6050水平放置的时候,Z轴的ACC值应该接近 16384.
LSB/g 是什么单位? LSB的意思是最小有效位,为数字输出方式。 就是 如果有1个g的有效位是16384, 翻过来,就是说表示精度是 1/16384 g
为何如此:因为 量程 +/- 2g, 就是 4g, 4* 16384 = 65536 = 2的16次方,正好是一个16位数能表示的
随着量程的增大((AFS_SEL=2,3,4),表示的精度下降
计算重力加速度,用读取值 除以 LSB/g (就得到当前方向的加速度,单位g)
比如,把MPU6050前倾放,得到X轴(相对于MPU6050芯片平面)的ACC值为 8000 , 则X轴的ACC就是 8000/16384 单位 g
2)计算GyroScope
官方文档如下:
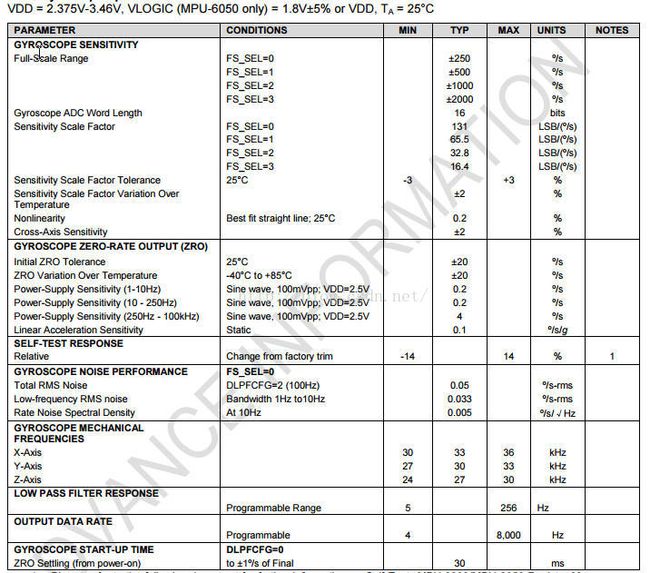
当 FS_SEL = 3 的时候,量程是 2000度/每秒
那么根据读到的数据 除以 16.4 就得到每秒赚动的度数
例子:
Angle_ax=(Accel_x)/8192; //加速度处理
Angle_az=(Accel_z)/8192; //加速度量程 +-4g/S
Angle_ay=(Accel_y)/8192; //转换关系8192LSB/g
Angle_gx=(Gyro_x)/65.5; //陀螺仪处理
Angle_gy=(Gyro_y)/65.5; //陀螺仪量程 +-500度/S
Angle_gz=(Gyro_z)/65.5; //转换关系65.5LSB/度