技术宅男逆袭 牛人自制激光虚拟投影键盘
#include <iostream>
#include <iomanip>
#include "opencv/cv.h"
#include "opencv/highgui.h"
#include "cvblob.h"
using namespace cvb;
typedef struct key
{
char c;
int x0;
int y0;
int x1;
int y1;
};
key g_keymap[] =
{
{'4',525,350,588,419},
{'5',442,345,504,414},
{'6',360,339,422,408},
{'7',277,332,342,404},
{'8',198,327,259,399},
{'9',121,320,174,389},
{'0',41, 318,94, 383},
{'E',528,274,590,337},
{'R',443,267,507,332},
{'T',359,263,428,327},
{'Y',280,259,344,321},
{'U',199,251,261,315},
{'I',119,246,179,307},
{'O',41, 240,96, 301},
{'D',504,203,567,259},
{'F',424,199,489,257},
{'G',348,194,410,251},
{'H',266,187,329,245},
{'J',192,183,251,241},
{'K',117,178,171,236},
{'L',42 ,174,92, 229},
{'X',543,144,605,197},
{'C',467,139,530,191},
{'V',392,135,457,190},
{'B',316,128,377,181},
{'N',242,124,299,176},
{'M',171,118,225,172},
{'<',98, 114,149,166},
{'>',26, 108,73, 159},
{'_',182,62, 531,127},
};
int g_key_num = sizeof(g_keymap)/sizeof(key);
int main()
{
CvTracks tracks;
cvNamedWindow("red_object_tracking", CV_WINDOW_AUTOSIZE);
CvCapture *capture = cvCaptureFromCAM(0);
cvGrabFrame(capture);
IplImage *img = cvRetrieveFrame(capture);
CvSize imgSize = cvGetSize(img);
IplImage *frame = cvCreateImage(imgSize, img->depth, img->nChannels);
IplConvKernel* morphKernel = cvCreateStructuringElementEx(5, 5, 1, 1, CV_SHAPE_RECT, NULL);
//unsigned int frameNumber = 0;
unsigned int blobNumber = 0;
bool quit = false;
while (!quit&&cvGrabFrame(capture))
{
IplImage *img = cvRetrieveFrame(capture);
cvConvertScale(img, frame, 1, 0);
IplImage *segmentated = cvCreateImage(imgSize, 8, 1);
// Detecting red pixels:
// (This is very slow, use direct access better...)
for (unsigned int j=0; j<imgSize.height; j++)
for (unsigned int i=0; i<imgSize.width; i++)
{
CvScalar c = cvGet2D(frame, j, i);
double b = ((double)c.val[0])/255.;
double g = ((double)c.val[1])/255.;
double r = ((double)c.val[2])/255.;
// unsigned char f = 255*((r>0.2+g)&&(r>0.2+b));
// cvSet2D(segmentated, j, i, CV_RGB(f, f, f));
if(b>0.4 || g>0.4 || r>0.4)
cvSet2D(segmentated, j, i, CV_RGB(255, 255, 255));
else
cvSet2D(segmentated, j, i, CV_RGB(0, 0, 0));
}
cvMorphologyEx(segmentated, segmentated, NULL, morphKernel, CV_MOP_OPEN, 1);
cvShowImage("segmentated", segmentated);
IplImage *labelImg = cvCreateImage(cvGetSize(frame), IPL_DEPTH_LABEL, 1);
CvBlobs blobs;
unsigned int result = cvLabel(segmentated, labelImg, blobs);
cvFilterByArea(blobs, 500, 1000000);
cvRenderBlobs(labelImg, blobs, frame, frame, CV_BLOB_RENDER_BOUNDING_BOX);
cvUpdateTracks(blobs, tracks, 200., 5);
cvRenderTracks(tracks, frame, frame, CV_TRACK_RENDER_ID|CV_TRACK_RENDER_BOUNDING_BOX);
cvShowImage("red_object_tracking", frame);
// print key
for (CvTracks::const_iterator it=tracks.begin(); it!=tracks.end(); ++it)
{
int xx = (int)it->second->centroid.x;
int yy = (int)it->second->centroid.y;
//std::cout << xx << ',' << yy << std::endl;
for(int i=0; i<g_key_num; i++)
{
if(xx > g_keymap.x0 &&
xx < g_keymap[i].x1 &&
yy > g_keymap[i].y0 &&
yy < g_keymap[i].y1)
{
std::cout << g_keymap[i].c << std::endl;
break;
}
}
}
cvReleaseImage(&labelImg);
cvReleaseImage(&segmentated);
char k = cvWaitKey(10)&0xff;
switch (k)
{
case 27:
case 'q':
case 'Q':
quit = true;
break;
case 's':
case 'S':
for (CvBlobs::const_iterator it=blobs.begin(); it!=blobs.end(); ++it)
{
std::stringstream filename;
filename << "redobject_blob_" << std::setw(5) << std::setfill('0') << blobNumber << ".png";
cvSaveImageBlob(filename.str().c_str(), img, it->second);
blobNumber++;
std::cout << filename.str() << " saved!" << std::endl;
}
break;
}
cvReleaseBlobs(blobs);
//frameNumber++;
}
cvReleaseStructuringElement(&morphKernel);
cvReleaseImage(&frame);
cvDestroyWindow("red_object_tracking");
return 0;
}
虚拟 激光投射键盘在1992年就由IBM发明了。
我第一次看到这玩意儿就觉得特别新奇,后来看到淘宝上棒子的产品,要900多米,实在是宰人啊。于是就一直有想法做一个。
不久前在淘宝看到了投射键盘图案的激光模组,果断买了一个,开始筹划制作一个。
taobao上买的650nm虚拟键盘激光组件:

虚拟键盘激光组件
而且现在有了强大的opencv图像处理库,实现这样的虚拟激光投射键盘变得易如反掌。
先说说投影键盘的基本原理。键盘由三个主要部件组成:摄像头、键盘图案投射器、一字线性感应激光头。
见下图:
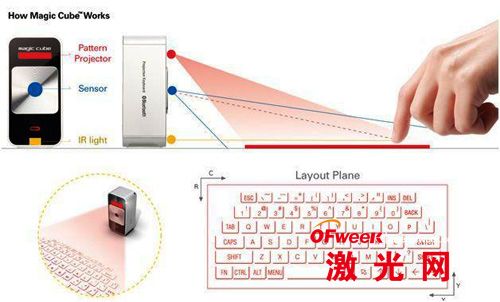
投影键盘的基本原理
图上从上到下分别是键盘图案投射器、摄像头、一字线性感应激光头。
当然,摄像头放在键盘图案投射器上面也是可以的,比如我就是这么做的。
1. 键盘图案投射器在平坦的桌面投出清晰键盘图案
2. 最底下的一字线性激光(一般采用红外线的,这样眼睛不可见)发出一字型激光,平行于桌面射出,这样如果手指有按键活动,会在手指上形成激光光斑
3. 摄像头捕获激光光斑,对应于键盘图案映射的位置,就可以知道哪些键被按下
OK,原理很简单,是不是。有了这些模块,剩下的关键就是摄像头的图像处理算法了,而且现在有了opencv,实现也不是难事。
这里说一下我的实现方法。
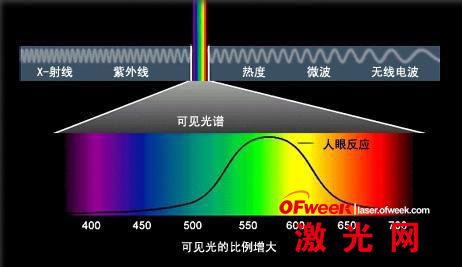
可见光谱
由于人眼对激光的反应不一样,780nm-808nm的激光人眼不敏感,可看到微弱的一丝红光。850nm至1064nm波长人眼不可见,通过红外感光仪器等专业设备可以看到,其中808-850nm通过摄像头可以看到。980-1064nm通过倍频片可以看到。
所以我在网上买了一个808nm-810nm 红外一字线激光器。这样配上滤光片,可以滤去绝大多数其他波长的杂光,只剩下红外激光的光斑。
这样做的好处是减少干扰,增加键盘的可靠性,而且使算法处理更加简单有效。
加上前面的650nm虚拟键盘激光组件,总共也就花了100块钱左右。
25mw 808nm-810nm 红外一字线激光器 激光头

红外一字线激光器
顺便说一句,本文中的摄像头放的位置只能捕捉到部分键盘图像,所以demo只是演示了部分键盘的按键。
不过丝毫不影响原理介绍。如果要获得全部键盘图像,或者去买一个广角的摄像头,或者把这个摄像头位置提高,不是什么难事。
时间有限,不想折腾了。
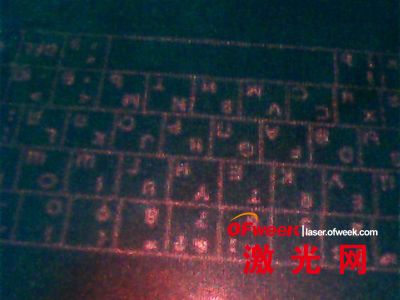
激光投影键盘
代码: