Zernike 矩简介
在模式识别中,一个重要的问题是对目标的方向性变化也能进行识别。Zernike 矩是一组正交矩,具有旋转不变性的特性,即旋转目标并不改变其模值。。由于Zernike 矩可以构造任意高阶矩,所以Zernike 矩的识别效果优于其他方法.
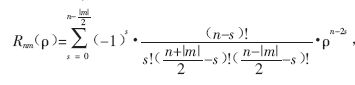
Zernike 提出了一组多项式{ V nm ( x , y) } 。这组多项式在单位圆{ x2 + y2 ≤1} 内是正交的,具有如下形式: V nm ( x , y) = V nm (ρ,θ) = Rnm (ρ) exp ( jmθ) ,并且满足 ∫∫ x^2+y^2 <= 1 [( V nm ( x , y) 的共轭]* V pq ( x , y) d x d y. = [pi/(n+1)]*δnpδmq .
if(a==b) δab = 1 else δab = 0,n 表示正整数或是0;m是正整数或是负整数它表示满足m的绝对值<=n 而且n-m的绝对值是偶数这两个条件;ρ 表示原点到象素(x,y)的向量的距离;θ 表示向量ρ 跟x 轴之间的夹角(逆时针方向).
对于一幅数字图象,积分用求和代替,即A nm =∑x∑y f(x,y) *[( V nm (ρ,θ) 的共轭],x^2+y^2 <=1
实际计算一幅给定图象的Zernike 矩时,必须将图象的重心移到坐标圆点,将图象象素点映射到单位圆内。由以上可知,使[ V nm (ρ,θ) 的共轭]可提取图象的特征,低频特性由n 值小的[( V nm (ρ,θ) 的共轭]来提取,高频特性由n 值大的来提取。Zernike 矩可以任意构造高价矩, 而高阶矩包含更多的图象信息, 所以Zernike 矩识别效果更好。,Zernike 矩仅仅具有相位的移动。
它的模值保持不变。所以可以将| A nm | 作为目标的旋转不变性特征。因为| A nm | =| A n , - m | ,所以只需计算m ≥0 的情况。