#include<opencv2/opencv.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<iostream>
using namespace cv;
using namespace std;
int main() {
Mat srcImage=imread("redflo.bmp",0);//读取并转成灰度图
int m=getOptimalDFTSize(srcImage.rows);//计算离散傅里叶变换最佳尺寸
int n=getOptimalDFTSize(srcImage.cols);
Mat padded;
//尺寸为2,3,5倍时,离散傅里叶变换较快,因此进行扩边,并用0补充
copyMakeBorder(srcImage,padded,0,m-srcImage.rows,0,n-srcImage.cols,BORDER_CONSTANT,Scalar::all(0));
//为傅里叶变换实部和虚部分配空间
Mat planes[]={Mat_<float>(padded),Mat::zeros(padded.size(),CV_32F)};
Mat complexI;
merge(planes,2,complexI);
//进行离散傅里叶变换
dft(complexI,complexI);
split(complexI,planes);
//求幅值放到planes[0]
magnitude(planes[0],planes[1],planes[0]);
Mat magnitudeImage=planes[0];
//对数变换,原因是幅值太大,必须缩小到合适显示的区间
magnitudeImage+=Scalar::all(1);
log(magnitudeImage,magnitudeImage);
//若是奇数,需要频谱裁剪
magnitudeImage=magnitudeImage(Rect(0,0,magnitudeImage.cols&-2,magnitudeImage.rows&(INT_MAX-2)));//-2或(INT_MAX-2)
int cx=magnitudeImage.cols/2;
int cy=magnitudeImage.rows/2;
Mat q0(magnitudeImage,Rect(0,0,cx,cy));
Mat q1(magnitudeImage,Rect(cx,0,cx,cy));
Mat q2(magnitudeImage,Rect(0,cy,cx,cy));
Mat q3(magnitudeImage,Rect(cx,cy,cx,cy));
//交换1,3(2,4)像限,直流和低频放中间,将(0,0)放中间
Mat tmp;
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
//归一化至[0,1]
normalize(magnitudeImage,magnitudeImage,0,1,CV_MINMAX);
imshow("srcImage",srcImage);
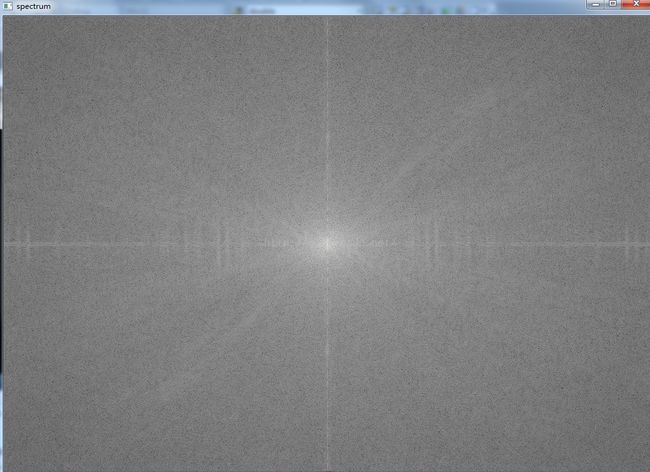
imshow("spectrum",magnitudeImage);
cout<<srcImage.rows<<endl<<srcImage.cols<<endl;//676*1024
cout<<magnitudeImage.rows<<endl<<magnitudeImage.cols<<endl;//720*1024
waitKey(0);
}