霍夫变换直线检测
#include "stdafx.h"
#include "highgui.h"
#include "cv.h"
#include "cxcore.h"
void main(int argc,char** argv)
{
IplImage *srcRGB = cvLoadImage("text.jpg",1);
cvNamedWindow("src",1);
cvShowImage("src",srcRGB);
IplImage* src=cvCreateImage(cvSize(srcRGB->width,srcRGB->height),8,1);
cvCvtColor(srcRGB,src,CV_RGB2GRAY);
IplImage* edge = cvCreateImage(cvSize(src->width,src->height),8,1);
cvZero(edge);
cvCanny(src,edge,40,90);
cvNamedWindow("edge",1);
cvShowImage("edge",edge);
IplImage* dst = cvCloneImage(srcRGB);
CvMemStorage *storage = cvCreateMemStorage();
CvSeq *lines = 0;
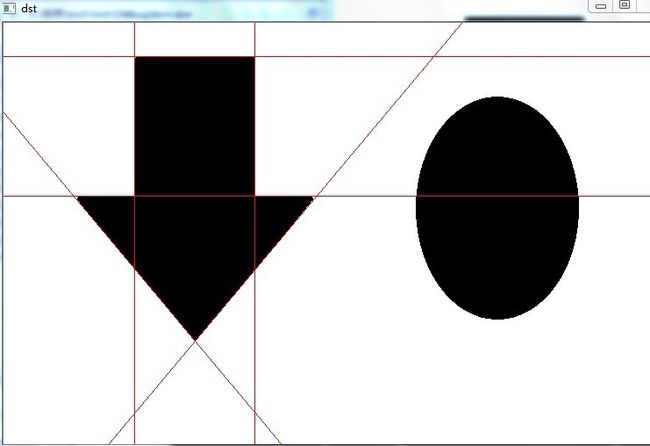
/* lines = cvHoughLines2(edge,storage,CV_HOUGH_STANDARD,1,CV_PI/180,120,0,0);
//rho单位是像素=1,theta单位是弧度=pi/180,threshold是认定为一条直线时在累计平面中必须达到的值
for(int i=0;i<MIN(lines->total,100);i++)
{
float* line=(float*) cvGetSeqElem(lines,i);
float rho=line[0];
float theta=line[1];
double a=cos(theta),b=sin(theta);
double x0=rho*a,y0=rho*b;
CvPoint p1,p2;
p1.x=cvRound(x0+1000*(-b));
p1.y=cvRound(y0+1000*a);
p2.x=cvRound(x0-1000*(-b));
p2.y=cvRound(y0-1000*a);
cvLine(dst,p1,p2,CV_RGB(255,0,0),1,8,0);
}*/
lines = cvHoughLines2(edge,storage,CV_HOUGH_PROBABILISTIC,1,CV_PI/180,50,0,10);
//param1为将要返回的线段的最小长度,param2为一条直线上分离线段不能连成一条直线的分隔像素点数
for(int i = 0;i<lines->total; ++i)
{
CvPoint *line = (CvPoint*)cvGetSeqElem(lines,i);
cvLine(dst,line[0],line[1],CV_RGB(255,0,0),3,8);
}
cvNamedWindow("dst",1);
cvShowImage("dst",dst);
cvWaitKey(0);
cvDestroyWindow("src");
cvReleaseImage(&src);
method = CV_HOUGH_PROBABILISTIC方法可以直接取到检测到的线段的两端点,存放于line[0],line[1]: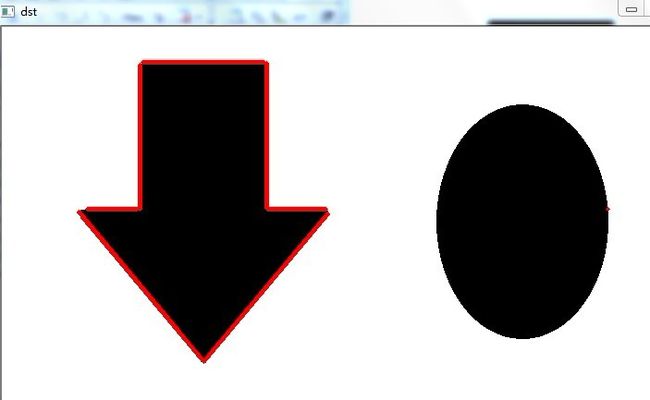
而CV_HOUGH_STANDARD方法只能输出检测到直线的极坐标r和theta值,确定不了线段: