图像特征之SUSAN角点
由于局部梯度的方法对噪声影响比较敏感而且计算量大,英国学者Smith和Brady提出一种基于形态学的角点特征检测方法。这种方法是一种基于灰度的特征点获取方法,适用于图像中的边缘检测,角点检测且计算速度快,适用于实时图像处理。
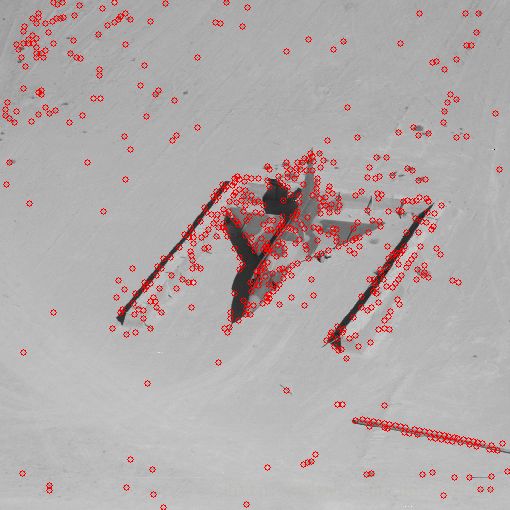
SUSAN角点检测的原理是:用一个固定半径的圆形模板在图像上滑动,该模板中心像素点称为核。若模板内其他点的灰度值与核的灰度值之差小于某一个阈值,则认为该点与核具有相似的灰度,所以满足这样条件的像素组成的区域称为核值相似区(Univalue Segment Assimilating Nucleus, USAN)。通过这种方式生成的USAN区域包含了该像素点的图像结构信息。USAN区域越大,模板内相似像素点较多,一般为图像平滑区域,USAN区域大小中等,一般为图像边缘区域,USAN区域很小,一般为角点。通过计算USAN区域的大小,就可以知道该点是否为角点。
自己按照SUSAN算子的理论编写了一段代码,是在opencv2.3.1+vs2008上实现的,若有错误,还望指正:
#include "stdafx.h"
#include <opencv2/opencv.hpp>
#include "highgui.h"
#include <math.h>
typedef unsigned long uint32;
typedef unsigned int uint16;
typedef unsigned char uint8;
#define THRESHOLD 20
#define RADIUS 3
IplImage *src_gray1, *src_gray2, *src_gray3;
IplImage* src_img, *dst_img;
CvMat *NumR0,*Rr0;
int MaxNumR0=0;
void AllocateImage(IplImage* I) //给图像分配大小
{
CvSize sz = cvGetSize(I);
dst_img = cvCreateImage( sz, IPL_DEPTH_8U, 1);
cvSetZero(dst_img);
src_gray1 = cvCreateImage( sz, IPL_DEPTH_8U, 1); //原图的三个通道
src_gray2 = cvCreateImage( sz, IPL_DEPTH_8U, 1);
src_gray3 = cvCreateImage( sz, IPL_DEPTH_8U, 1);
NumR0 = cvCreateMat(sz.height,sz.width,CV_16SC1);
Rr0 = cvCreateMat(sz.height,sz.width,CV_16SC1);
cvSetZero(NumR0);
cvSetZero(Rr0);
}
void DeallocateImage()
{
cvReleaseImage(&src_img);
cvReleaseImage(&dst_img);
cvReleaseImage(&src_gray1);
cvReleaseImage(&src_gray2);
cvReleaseImage(&src_gray3);
cvReleaseMat(&NumR0);
}
void SUSAN_check(IplImage* I, IplImage* dst, int r) //SUSAN角点检测函数
{
int i,j,x,y;
int num,MaxNum=0,g,CValue;
int R0Value,temp;
for( i=r; i<(I->height-r); i++ ) //计算n(r0),模板内图像USAN的像元数量
{
for( j=r; j<(I->width-r); j++ )
{
R0Value=cvGetReal2D(I,i,j);
num=0;
for( y=i-r; (y-i<=r)&&(y-i>=-r);y++ )
{
for( x=j-r;(x-j<=r)&&(x-j>=-r);x++ )
{
if(((x-j)*(x-j)+(y-i)*(y-i))<=r*r&&(x!=j||y!=i)) //中心点圆形邻域内
{
temp=cvGetReal2D(I,y,x);
if( abs(R0Value-temp) <= THRESHOLD )
num++;
}
}
}
cvSetReal2D(NumR0,i,j,num);
if(num>MaxNum) MaxNum = num;
}
}
g=3*MaxNum/4;
for( i=r; i<(I->height-r); i++ ) //计算R(r0),USAN特征图像
{
for( j=r; j<(I->width-r); j++ )
{
temp = cvGetReal2D(NumR0,i,j);
if( temp<g )
cvSetReal2D(Rr0,i,j,(g-temp));
}
}
for( i=r; i<(I->height-r); i++ ) //非极大抑制
{
for( j=r; j<(I->width-r); j++ )
{
CValue = cvGetReal2D(Rr0,i,j); //USAN特征图像中心点值
num=0;
if(CValue!=0)
{
for( y=i-r; (y-i<=r)&&(y-i>=-r);y++ ) //查看周围半径r圆形邻域是否为极大值
{
for( x=j-r;(x-j<=r)&&(x-j>=-r);x++ )
{
if(((x-j)*(x-j)+(y-i)*(y-i))<=r*r&&(x!=j||y!=i)) //中心点圆形邻域内
{
temp = cvGetReal2D(Rr0,y,x);
if(j==27&&i==129)
{
MaxNum=MaxNum;
}
if(CValue>temp)
num++;
}
}
}
if(num==MaxNum)
{
cvCircle(src_img,cvPoint(j,i),3,cvScalar(0,0,255),1,8,0);
//cvSet2D(src_img,i,j,cvScalar(0,0,255));
*(dst->imageData+i*dst->widthStep+j) =255;
}
}
}
}
}
int _tmain(int argc, _TCHAR* argv[])
{
//src_img = cvLoadImage("角点.bmp");
//src_img = cvLoadImage("5.2.09.pgm");
src_img = cvLoadImage("7.1.02.pgm");
AllocateImage(src_img);
cvSplit( src_img, src_gray1, src_gray2, src_gray3, 0);
cvNamedWindow("my picture",CV_WINDOW_AUTOSIZE);
cvNamedWindow("my dst",CV_WINDOW_AUTOSIZE);
cvShowImage("my picture",src_img);
SUSAN_check(src_gray1, dst_img, RADIUS) ;
cvShowImage("my dst",src_img);
cvWaitKey(0);
DeallocateImage();
cvDestroyWindow("my picture");
cvDestroyWindow("my dst");
return 0;
}