PID概述以及在无人机中的应用
PID控制是将误差信号的比例P,积分I,微分D通过线性组合构成控制量,称之为PID控制。但是在很多情况下,往往不一定需要三个单元,但是比例单元是必不可少的。PID控制器难点在于参数的整定,但是很多情况下我们可以直接根据系统的时域响应来调节这三个单元的参数。
1. 比例环节(P):直接将误差信号放大或缩小,因此将比例环节参数增大可以提高响应速度并且减小稳态误差,但是,快速性和稳定性总是矛盾的,增大比例系数的同时,系统的稳定性会逐渐降低,系统有可能会出现超调,震荡,甚至发散,因此合适的比例增益是在快速性和稳定性之间进行折中。
2. 积分环节(I):从积分的定义可知,该环节是将误差不断进行累积,可实现消除稳态误差。增益越大,积分作用越强,稳态误差消除也越快,但是带来的问题是容易产生积分饱和现象,带来打的超调并延缓系统进入稳态的速度。
3. 微分环节(D):这是一个超前环节,提前预知我们控制量是该减还是该增,避免造成超调,震荡,因此增大该环节增益有助于提高系统的稳定性,避免震荡,但是对快速性产生了副作用。微分环节对噪声信号将产生放大作用。
我们对自动控制系统的要求无非是稳准快:
稳定性:(P和I降低系统的稳定性,D提高系统稳定性)在平衡状态下,系统受到某个干扰,经过一段时间,其被控量可以达到某一稳定状态
准确性:(p和I提高稳态精度,D无作用)系统处于稳态时,其稳态误差小
快速性:(P和D提高响应速度,I降低响应速度)
我们看一下pid算法的一般形式:
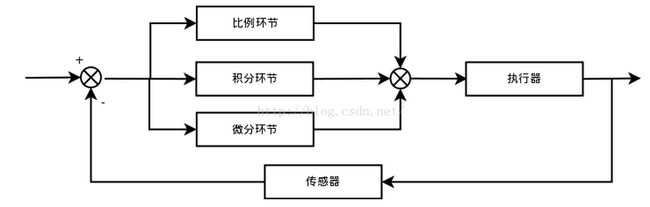
简单点说就是通过误差信号控制被控量,控制器本身就是比例,积分,微分三个环节的加和。由上图可知,pid控制就是对偏差的控制过程。如果偏差为零,则比例环不起作用,只有存在偏差时,比例环节才起作用。
积分环节主要用来消除静差(系统稳定后输出值和设定值之间的差值)积分环节实际上就是偏差累计的过程,把累计的误差加到原有系统上以抵消系统造成的静差)
微分信号则反应了偏差信号的变化规律,或者说是变化趋势,根据偏差信号的变化趋势来进行超前调节,从而增加系统的快速性。
PID在四轴中的作用:
P控制多轴飞行器对角度变化的响应速度和力度,它产生一个目标位置跟当前位置的角度偏差大小成正比的矫正力量。P产生的控制是I和D的控制基础。P值越大,矫正力量越大,校准速度越快。在较大的P值作用下,任何外部偏转飞行器的企图,都会产生一个非常强的阻挡力量。
如果随着P值过高,校准力量过大,角度矫正会过头,过头后需要相反的力量来校准。这就会造成震荡效应,直到最终稳定下来,也可能由于矫正过头被放大而让多轴飞行器变得完全不稳定。
增加P值,飞行器自稳能力会变得更好,直到P值过高,飞行器会产生震荡和失去控制。减小P值,多轴飞行器的自稳能力下降,飞行器容易漂移;直到P太低,飞行器会变得非常不稳定。
总结:特技飞行需要稍微较高的P值,温和平稳飞行需要较低的P值。
I根据当前位置和目标位置的角度偏差的累积,提供一个可变的校准力量。角度偏差越大或者偏差的时间越长,这个校准力量越大。I在有系统误差和外力作用时,可消除偏差提高精度,积分所得的值应该有所限制,以防让他变得太大。
增加I会让飞行器的自稳能力更强,能减少由于机架不平衡等原因导致的漂移,但也会加快多轴飞行器对角度变化的响应速度。过大的I会让飞行器产生过冲,甚至振荡。减小I能提高飞行器对角度变化的反应(P值作用),但是会增加漂移和减少保持原来位置的能力。
总结:特技飞行需要较高的I
D抑制P和I调节时产生的过冲和振荡,也可以抵抗外界的突发干扰,组织系统的突变。
增加D值能降低多轴飞行器的角度快速变化,抑制飞行器过冲和振荡。减少D值,能提高多轴飞行器对角度快速变化的响应速度。
总结:特技需要小点的D值,温和平稳飞行需要增大D值。