图像稀疏表示—ScSPM和LLC总结
如有评论,请拜访原文。原文链接:http://blog.csdn.net/jwh_bupt/article/details/9837555
论文系列对稀疏编码介绍比较详细...
code下载:http://www.ifp.illinois.edu/~jyang29/ScSPM.htm
目录()[-]
- 前言
- 再前言
- ScSPM
- LLC
- References
稀疏编码系列:
- (一)----Spatial Pyramid 小结
- (二)----图像的稀疏表示——ScSPM和LLC的总结
- (三)----理解sparse coding
- (四)----稀疏模型与结构性稀疏模型
---------------------------------------------------------------------------
-
前言
上一篇提到了SPM(SPM[1]全称是Spatial Pyramid Matching,出现的背景是bag of visual words模型被大量地用在了Image representation中,但是BOVW模型完全缺失了特征点的位置信息。匹配利用对比比较阈值获取类别标记,分类使用内积获得类别数字)。这篇博客打算把ScSPM和LLC一起总结了。ScSPM和LLC其实都是对SPM的改进。这些技术,都是对特征的描述。它们既没有创造出新的特征(都是提取SIFT,HOG, RGB-histogram et al),也没有用新的分类器(也都用SVM用于最后的image classification),重点都在于如何由SIFT、HOG形成图像的特征(见图1)。从BOW,到BOW+SPM,都是在做这一步。说到这,怕会迷糊大家------SIFT、HOG本身不就是提取出的特征么,它们不就已经形成了对图像的描述了吗,为啥还有我后面提到的各种BOW云云呢![]() 。这个问题没错,SIFT和HOG它们确实本身已经是提取到的特征了,我们姑且把它们记为x。而现在,BOW+SPM是对特征x再进行一层描述,就成了Φ(x)——这相当于是更深一层(deeper)的model。一个十分相似的概念是SVM里面的核函数kernel,K=Φ(x)Φ(x),x是输入的特征,Φ(x)则对输入的特征又做了一层抽象(不过我们用核函数没有显式地对Φ(x)做定义罢了)。根据百度的余凯老师在CVPR2012的那个Tutorial上做的总结[5]:Deeper model is preferred,自然做深一层的抽象效果会更好了。而Deep Learning也是同样的道理变得火了起来。
。这个问题没错,SIFT和HOG它们确实本身已经是提取到的特征了,我们姑且把它们记为x。而现在,BOW+SPM是对特征x再进行一层描述,就成了Φ(x)——这相当于是更深一层(deeper)的model。一个十分相似的概念是SVM里面的核函数kernel,K=Φ(x)Φ(x),x是输入的特征,Φ(x)则对输入的特征又做了一层抽象(不过我们用核函数没有显式地对Φ(x)做定义罢了)。根据百度的余凯老师在CVPR2012的那个Tutorial上做的总结[5]:Deeper model is preferred,自然做深一层的抽象效果会更好了。而Deep Learning也是同样的道理变得火了起来。
再次盗用一些余凯老师在CVPR2012的那个Tutorial上的一些图:
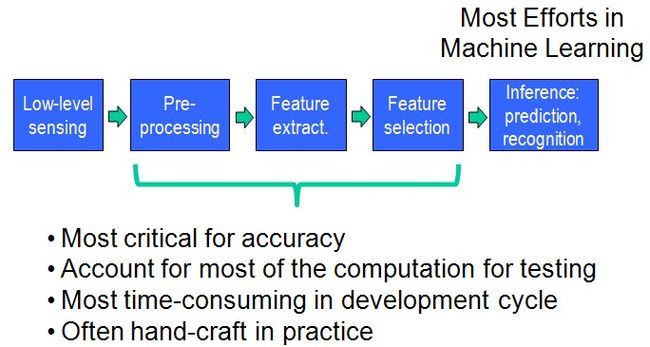
图 (1)
SPM,ScSPM,LLC所做的工作也都集中在design feature这一步,而不是在Machine Learning那一步。值得注意的是,我们一直在Design features,而deep learning则是design feature learners。
BOW+SPM的整体流程如图(2)所示:
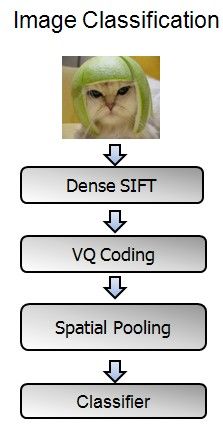
图(2)
Feature Extraction的整体过程就是先提取底层的特征(SIFT,HOG等),然后经过coding和pooling,得到最后的特征表示。
----Coding: nonlinear mapping data into another feature space
----Pooling: obtain histogram
而SIFT、HOG本身就是一个coding+pooling的过程,因此BOW+SPM就是一个两层的Coding+Pooling的过程。所以可以说,SIFT、SURF等特征的提出,是为了寻找更好的第一层Coding+Pooling的办法;而SPM、ScSPM、LLC的提出,是为了寻找更好的第二层Coding+Pooling的办法。而ScSPM和LLC所提出的更好的Coding办法就是Sparse Coding。
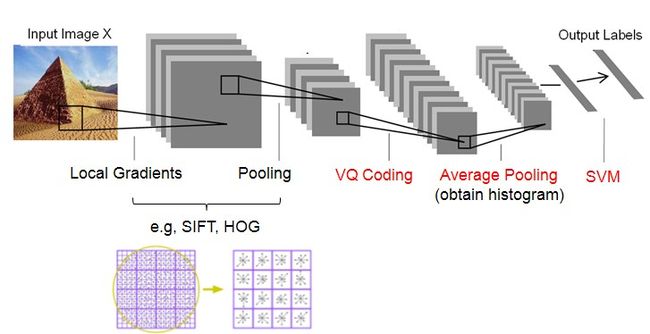
图(3)
-
再前言
在总结ScSPM之前又要啰嗦些话。为啥会有SPM→ScSPM呢?原因之一是为了寻找better coding + better pooling的方式提高性能,原因之二就是提高速度。如何提高速度?这里的速度,不是Coding+Pooling的速度,而是分类器的速度。SPM设计的是一个Linear feature,在文章中作者用于实验则是用了nonlinear SVM(要用Mercer Kernels)。相比linear SVM,nonlinear SVM在training和testing的时候速度会慢的。至于其原因,我们不妨看看SVM的对偶形式:
 (1)
(1)
如果核函数是一个线性的kernel:K(z, zi)=zTzi,那么SVM的决策函数就可以改写为:
 (2)
(2)
从两式可以看见,抛开训练和存储的复杂度不说,对于测试来说,(1)式对每个测试样本要单独计算K(z, zi),因此testing的时间复杂度为O(n)。而(2)式的wT可以一次性事先算出,所以每次testing的时间复杂度为O(1)。此外,linear classifier的可扩展性会更好。
因此,如果能在coding+pooling后设计得到线性可分的特征描述,那就最好了。因此能否设计一个nonlinear feature + linear SVM得到与 linear feature + nonlinear SVM等效甚至更好的效果,成为ScSPM和LLC的研究重点。
-
ScSPM
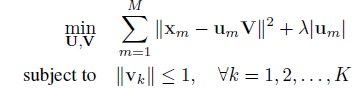
SPM在coding一步采用的是Hard-VQ,也就是说一个descriptor只能投影到dictionary中的一个term上。这样就造成了明显的重建误差(worse reconstruction,large quantization errors)。这样,原本很相似的descripors经过coding之后就会变得非常不相似了。ScSPM为此取消了这一约束,它认为descripor可以投影到某几个terms上,而不仅仅是一个。因此,其目标函数变成了:
 (3)
(3)
其中M是descriptor的数目,Um表示第m个descriptor在字典V上的投影系数。
它对投影系数用L1-norm做约束实现了稀疏。求解问题称为LASSO (least absolute shrinkage and selection operator),在得到稀疏结果的同时,它无法得到解析解,因此速度肯定是很慢的。关于L1-norm和LASSO问题,可以参看这里。
为什么Sparse Coding好,主要有以下几个原因:
1)已经提到过的重建性能好;[2]
2)sparse有助于获取salient patterns of descripors;[2]
3)image statistics方面的研究表明image patches都是sparse signals;[2]
4)biological visual systems的研究表明信号的稀疏特征有助于学习;[4]
5)稀疏的特征更加线性可分。[2]
总之,"Sparse coding is a better building block“。
Coding过后,ScSPM采用的Pooling方法是max pooling:Zj=max Uij。相比SPM的average pooling:Zj=1/M *Σ Uij。可以看见average pooling是一个linear feature representation,而max pooling是nonlinear的。我是这么理解再前言中提到的linear和nonlinear feature的。(@13.08.11:今天在写理解sparse coding的时候发现这里搞错了。不光是pooling的函数是线性的,VQ的coding得到的u关于x好像也是线性的。)
作者在实验中得出max pooling的效果好于average pooling,原因是max pooling对local spatial variations比较鲁棒。而Hard-VQ就不好用max pooling了,因为U中各元素非0即1。
另外实验的一个有趣结果是发现ScSPM对大的codebook size表现出更好的性能,反观SPM,codebook大小对SPM结果影响不大。至于为啥,我也不懂。
-
LLC
LLC和ScSPM差不多了,也是利用了Sparsity。值得一说的是,其实Hard-VQ也是一种Sparse Coding,只不过它是一种重建误差比较大的稀疏编码。LLC对ScSPM的改进,则在于引入了locality。为了便于描述,盗用一下论文的图:
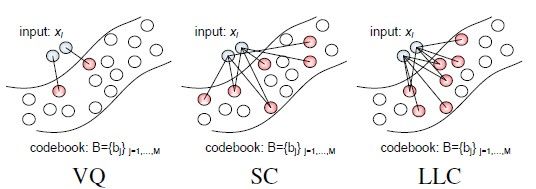
图(4)
这个图实在是太棒了,太能解释问题了。VQ不用说,重点在于SC和LLC之间,LLC引入了locality的约束,即不仅仅是sparse要满足,非零的系数还应该赋值给相近的dictionary terms。作者在[4]中解释到,locality 很重要是因为:
1)nonlinear function的一阶近似要求codes是local的;
2)locality能够保证codes的稀疏性,而稀疏却不能保证locality;
3)稀疏的coding只有再codes有局部性的时候有助于learning。
总之,"locality is more essential than sparsity"。
LLC的目标函数是:
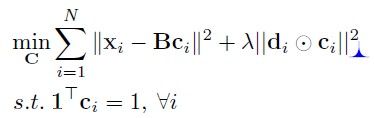 (4)
(4)
和(3)一样,(4)可以按照加号的前后分成两部分:加号前的一项最小化是为了减少量化误差(学习字典、确认投影系数);加号后的一项则是做出假设约束(包括是一些参数的regularization)。这个求解是可以得到闭合解的,同时也有快速的近似算法解决这个问题,因此速度上比ScSPM快。
di描述的是xi到每个dictionary term的距离。显然这么做是为了降低距离大的term对应的系数。
locality体现出的最大优势就是,相似的descriptors之间可以共享相似的descriptors,因此保留了codes之间的correlation。而SC为了最小化重建误差,可能引入了不相邻的terms,所以不能保证smooth。Hard-VQ则更不用说了。
实验部分,则采用max pooling + L2-normalization。
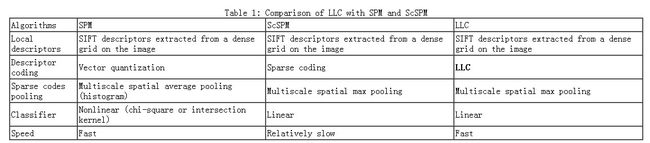
文章的最后,盗窃一个ScSPM第一作者的总结表格结束吧(又是以偷窃别人图标的方式结束![]() )
)
References:
[1] S. Lazebnik, C. Schmid, and J. Ponce. Beyond bags of features: Spatial pyramid matching for recognizing natural scene categories. CVPR2006
[2] Jianchao Yang, Kai Yu, Yihong Gong, and Thomas Huang. Linear spatial pyramid matching using sparse coding for image classification. CVPR2009.
[3] Jinjun Wang, Jianchao Yang, Kai Yu, Fengjun Lv, and Thomas Huang. Locality-constrained linear coding for image classification. CVPR2010
[4] Kai Yu, Tong Zhang, and Yihong Gong. Nonlinear learning using local coordinate coding. NIPS2009.
[5] Kai Yu. CVPR12 Tutorial on Deep Learning: Sparse Coding.