线性代数笔记18:线性变换与基变换
每一个矩阵都可以看作是线性变换,矩阵乘法也是由线性变换的复合引出的。
线性变换
理解
线性变换是一种映射,对于向量来说,就是线性空间到线性空间的映射。这里不严格给出线性变换的定义,但举例来说,投影变换、反射变换、不定积分等都可以看做是线性变换。
与线性变换相对的是仿射变换,例如:
就是一个仿射变换,可以通俗的理解为对现象变换 Ax A x 加上了一个偏移量 x0 x 0 。
性质
由线性变换的性质,我们可以得到:
- T(0)=0,T(−x)=−x T ( 0 ) = 0 , T ( − x ) = − x
- T(c1x1+c2x2+...+cnxn)=c1T(x1)+c2T(x2)+...+cnT(xn) T ( c 1 x 1 + c 2 x 2 + . . . + c n x n ) = c 1 T ( x 1 ) + c 2 T ( x 2 ) + . . . + c n T ( x n )
- 若 x1,...,xn x 1 , . . . , x n 线性相关,则 T(x1),...T(xn) T ( x 1 ) , . . . T ( x n ) 线性相关。
即线性变换保持向量空间的线性关系。
例如,线性变换总是把直线变成直线,把三角形变成三角形,把平行四边形变成平行四边形。。。
线性变换的矩阵表示
我们想用一个矩阵来表示一个向量中所有线性空间中的变换,也就是用矩阵来描述这个线性变换。
设 V V 和 W W 分别是数域上 n n 维、 m m 维向量空间, T:V→W T : V → W 是 V V 到 W W 的线性变换。
在 V V 中取一组基 v1,...,vn v 1 , . . . , v n ,则对于任意的 v v ,可以用基表示为 v=c1v1,...,cnvn v = c 1 v 1 , . . . , c n v n ,这也就是 v v 在这组基下的坐标。
因此, T(v)=c1T(v1)+...+cnT(vn) T ( v ) = c 1 T ( v 1 ) + . . . + c n T ( v n ) 。我们可以发现,要求这个线性空间中任意向量的线性变化,只需要知道基的变换即可。
因此,我们可以在 W W 中取一组基 w1,...,wm w 1 , . . . , w m ,则得到基的线性变换为:
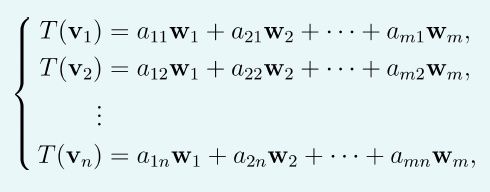
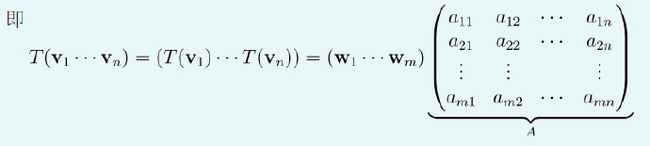
称 m×n m × n 矩阵 A A 为线性变换 T T 在 V V 中给定基 v1,....,vn v 1 , . . . . , v n 和 W W 中给定基 w1,...,wm w 1 , . . . , w m 下的矩阵表示。
线性变换与矩阵之间的关系
线性变换的唯一性
对于一个线性变换 σ σ ,在确定了一组基后,对应于唯一的矩阵 A A 。
而一个矩阵 A A 在一组基下,也对应唯一一个线性变换 σ σ 。
可逆线性变换
设 σ∈L(V,V) σ ∈ L ( V , V ) 为可逆线性变换,且 σ σ 在 V V 的某一组基下的矩阵为 A A ,则 σ−1 σ − 1 在这组基下的矩阵为 A−1 A − 1 。
例子
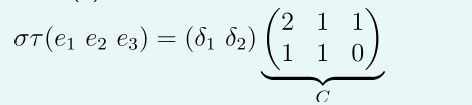
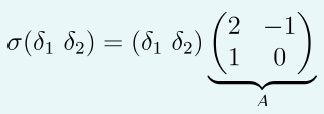
设线性变换 t:R3→R2 t : R 3 → R 2 定义为 t(x,y,z)=(x+y,y−z) t ( x , y , z ) = ( x + y , y − z ) ,线性变换 σ:R2→R2 σ : R 2 → R 2 定义为 σ(u,v)=(2u−v,u) σ ( u , v ) = ( 2 u − v , u ) ,求线性变换 σt:R3→R2 σ t : R 3 → R 2 在 R3 R 3 与 R2 R 2 标准基下的矩阵。
注意到:
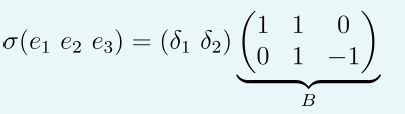
因此在 R3 R 3 的标准基 e1,e2,e3 e 1 , e 2 , e 3 与 R2 R 2 的标准基 δ1,δ2 δ 1 , δ 2 下有:
因此:
又因为:
验证可得:
AB=C A B = C
这就是线性变换的复合。
基变换
我们可以将基变换理解为特殊的线性变换,因为基变换其实是可逆线性变换,也就是说, A A 始终是可逆矩阵。
设 σ σ 是恒同变换,则:
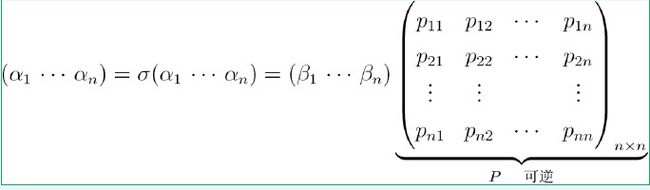
则恒同变换 σ σ 在两组基下的矩阵表示 P P 与 V V 的这两组基之间的基变换矩阵。
线性变换在不同基下的矩阵
我们发现,线性变换与基的选取有关:同一个线性变换在不同基下的矩阵表示不相同。
因此,我们希望找出线性变换与基无关的性质,或者说,找出线性变换的矩阵表示如何随着基的改变而改变。
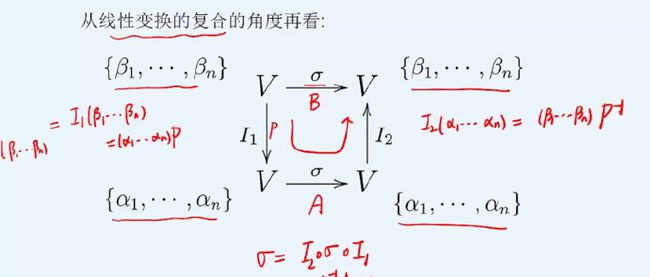
对于这样一个变换,我们既可以通过 B B 矩阵直接得到,也可以通过基变换 P P ,在新基上用 A A 矩阵变换,最后回到原来的基上来表示,因此可以得到:
B=PAP−1 B = P A P − 1
我们发现,对于同样一个线性变化,在不同基下的变换矩阵时相似的,同时,可逆矩阵 P P 表示这个基变换矩阵。
这是个很好的性质,我们因此可以理解对角化 A=SΛS−1 A = S Λ S − 1 和奇异值分解 A=U∑VT A = U ∑ V T ,在此不再赘述,可以参考目录。
参考资料
- 线性代数(2)