特征分解,奇异值分解(SVD) 和隐语义模型(LFM)
[摘要]
特征分解——>奇异值分解(SVD)——>隐语义模型(LFM),三个算法在前者的基础上推导而成,按顺序先后出现。三者均用于矩阵降维。其中:
- 特征分解可用于主成分分析。(可参考博主文章主成分分析)
- 奇异值分解(SVD)和隐语义模型(LFM)可用于推荐系统中,将评分矩阵补全、降维。
为什么进行矩阵分解:
- 有人说,将大型矩阵分解为简单矩阵乘积的形式,为了减少计算量。矩阵分解及应用毕业论文_豆丁网
- 有人说,在自然语言处理和推荐系统中,会有非常稀疏的矩阵,把稀疏矩阵分解成高阶特征的线性组合,便于分类和预测。通俗地理解矩阵分解的意义
接下来按推导顺序讲解
1 特征分解
1.1 为什么进行特征分解?(目的)
将矩阵降维。
1.2 什么样的矩阵可以进行特征分解?(前提)
- 待降维的矩阵是方阵。
- ( A − λ E ) x = 0 (A-\lambda E)x=0 (A−λE)x=0有非零解,即 ∣ A − λ E ∣ = 0 |A-\lambda E|=0 ∣A−λE∣=0。
1.3 特征分解的原理
-
特征分解使用到矩阵的特征值,所以先了解特征值的概念。
A x = λ x Ax=\lambda x Ax=λx
上式中, λ \lambda λ是矩阵 A A A的一个特征值, x x x是矩阵 A A A的特征值 λ \lambda λ对应的特征向量,是一个 n n n维向量。
站在特征向量的角度,特征向量的几何含义是:特征向量 x x x通过方阵 A A A变换,只缩放,方向不变。(即 x x x左乘一个方阵的效果,等同于 x x x乘以一个数值。 A x Ax Ax称为矩阵变换, λ x \lambda x λx称为矩阵缩放,变换的效果与缩放相同。)
站在方阵$A$的角度: n × n n \times n n×n的方阵 A A A通过右乘一个矩阵 x x x,可以变换成一个 n × 1 n \times 1 n×1的列向量。 -
得到方阵 A A A的 n n n个特征值,组成对角矩阵 ∑ \sum ∑:
∑ = { λ 1 0 0 . . . 0 0 λ 2 0 . . . 0 0 0 . . . . . . 0 . . . . . . . . . λ n − 1 0 0 . . . 0 0 λ n } \sum = \left\{ \begin{matrix} \lambda_1 & 0 & 0 &...& 0 \\ 0 & \lambda_2 & 0 &...& 0 \\ 0 & 0 & ... & ... & 0 \\ ... & ... & ... & \lambda_{n-1} & 0 \\ 0 & ... & 0 & 0 & \lambda_n \end{matrix} \right\} ∑=⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧λ100...00λ20......00......0.........λn−100000λn⎭⎪⎪⎪⎪⎬⎪⎪⎪⎪⎫ -
则方阵 A A A的特征分解就可以表示为:
A = U ∑ U − 1 A = U \sum U^{-1} A=U∑U−1
其中 U U U是 n n n个特征向量组成的 n × n n\times n n×n维方阵, ∑ \sum ∑是这 n n n个特征值为主对角线的 n × n n\times n n×n维方阵。 -
可以将 方阵 A A A的特征分解进一步表示:
将 n n n 个特征向量标准化(可使用施密特正交化方法):

便可以满足 U − 1 = U T U^{-1}=U^T U−1=UT,这时方阵A的特征分解可以进一步写成:
A = U ∑ U T A = U \sum U^T A=U∑UT
1.4 特征分解的手推计算

1.5 特征分解的Python实现
NumPy
import numpy as np
A = np.array([[1,2,3],
[4,5,6],
[7,8,9]])
# 计算特征值
print(np.linalg.eigvals(A))
# 同时计算特征值和特征向量
eigvals,eigvectors = np.linalg.eig(A)
print(eigvals)
print(eigvectors)
Scipy
import numpy as np
import scipy as sp
A = np.array([[1,2,3],
[4,5,6],
[7,8,9]])
# 计算特征值
print(sp.linalg.eigvals(A))
# 同时计算特征值和特征向量
eigvals,eigvectors = sp.linalg.eig(A)
print(eigvals)
print(eigvectors)
参考网址:【深度学习基础】:线性代数(一)_特征分解及numpy、scipy实现
2 奇异值分解(SVD)
2.1 为什么进行奇异值分解?(目的)
矩阵是方阵,可以分解,方法是1中的特征分解( A = U ⋅ ∑ ⋅ U T A=U \cdot \sum \cdot U^T A=U⋅∑⋅UT)。
矩阵不是方阵,即列数和行数不等,也可以分解,最常用的分解方法是奇异值分解(SVD)。
2.2 什么样的矩阵可以进行奇异值分解?(前提)
任意矩阵。
2.3 奇异值分解的原理
2.3.1 奇异值分解公式
有 n × n n \times n n×n的矩阵A,将其进行奇异值分解,公式如下:
A = U ∑ V T A = U \sum V^T A=U∑VT
其中,
- U(叫做左奇异值, U U U的列叫做左奇异向量)是 m × m m \times m m×m的方阵,
- V V V(对应的, V V V叫右奇异值,V的列叫做右奇异向量)是 n × n n \times n n×n的方阵,
- ∑ \sum ∑是 m × n m \times n m×n的矩阵,主对角线元素称为奇异值,其他元素均为0。
进一步的,
- U的列是 A A T AA^T AAT的特征向量,
- V V V(注意,公式中使用时,需要进行转置。即 V T V^T VT的行是 A T A A^TA ATA的特征向量)的列是 A T A A^TA ATA的特征向量。
- A A T AA^T AAT与 A T A A^TA ATA的特征值相同,为 { λ 1 、 λ 2 、 . . . λ r } \left \{ \lambda _1、\lambda _2、... \lambda _r \right \} {λ1、λ2、...λr}, ∑ \sum ∑主对角线上的奇异值 σ i = λ i \sigma_i=\sqrt{\lambda_i} σi=λi。一般奇异值会有多个,而我们只使用top-k个构成这个对角阵。
2.3.2 奇异值分解的手推计算


参考文献:
PCA为什么使用协方差矩阵
奇异值的物理意义是什么?
两篇文章都非常不错,建议阅读。
2.3.3 奇异值分解的Python实现
(1) numpy.linalg.svd() 程序实现
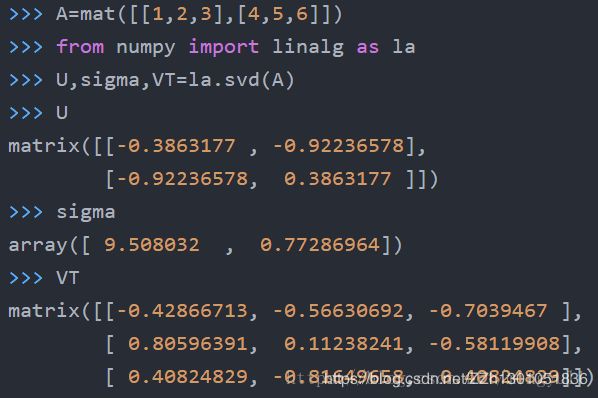
有一点需要注意,sigma本来应该跟A矩阵的大小2*3一样,但linalg.svd()只返回了一个行向量的sigma,并且只有2个奇异值(本来应该有3个),这是因为第三个奇异值为0,舍弃掉了。之所以这样做,是因为当A是非常大的矩阵时,只返回奇异值可以节省很大的存储空间。当然,如果我们要重构A,就必须先将sigma转化为矩阵。
(2)svd用于降维
# 奇异值分解(SVD)
import numpy as np
#原始矩阵n*m
A = np.mat([[1,2,3],
[4,5,6],
[7,8,9]])
U, sigma, VT = np.linalg.svd(A)
print('===原始===')
print('A = ',A)
print('U = ', U)
print('sigma = ', sigma)
print('VT = ', VT)
print("===用k个描述,描述前后值A与newA相差不多===")
k = 1 #特征值共两个,我们用最大的top-1个奇异值和对应的U和V中的向量来描述矩阵A。
newU = U[:,:k]
newSig = np.mat(np.eye(k)*sigma[:k])
newVT = VT[:k,:]
newA = newU*newSig*newVT
print('newU = ',newU)
print('newSig = ', newSig)
print('newVT = ', newVT)
print('newA = ', newA)
print("降维:由n*m维降低到n*k维")
xformedA = A.T*newU*newSig.T
print(xformedA)
输出
===原始===
A = [[1 2 3]
[4 5 6]
[7 8 9]]
U = [[-0.21483724 0.88723069 0.40824829]
[-0.52058739 0.24964395 -0.81649658]
[-0.82633754 -0.38794278 0.40824829]]
sigma = [1.68481034e+01 1.06836951e+00 4.41842475e-16]
VT = [[-0.47967118 -0.57236779 -0.66506441]
[-0.77669099 -0.07568647 0.62531805]
[-0.40824829 0.81649658 -0.40824829]]
===用k个描述,描述前后值A与newA相差不多===
newU = [[-0.21483724]
[-0.52058739]
[-0.82633754]]
newSig = [[16.84810335]]
newVT = [[-0.47967118 -0.57236779 -0.66506441]]
newA = [[1.73621779 2.07174246 2.40726714]
[4.2071528 5.02018649 5.83322018]
[6.6780878 7.96863051 9.25917322]]
降维
[[-136.15878258]
[-162.471513 ]
[-188.78424343]]
- numpy.linalg.svd方法
函数:np.linalg.svd(a,full_matrices=1,compute_uv=1)。
参数:
- a是一个形如(M,N)矩阵
- full_matrices的取值是为0或者1,默认值为1,这时u的大小为(M,M),v的大小为(N,N) 。否则u的大小为(M,K),v的大小为(K,N) ,K=min(M,N)。
- compute_uv的取值是为0或者1,默认值为1,表示计算u,s,v。为0的时候只计算s。
返回值:
总共有三个返回值u,s,v
u大小为(M,M),s大小为(M,N),v大小为(N,N)。
A = usv
其中s是对矩阵a的奇异值分解。s除了对角元素不为0,其他元素都为0,并且对角元素从大到小排列。s中有n个奇异值,一般排在后面的比较接近0,所以仅保留比较大的r个奇异值。
参考网址:Python之SVD介绍