机器人控制器编程课程-教案03-进阶
先简要复习一下上次课的内容,主要介绍了一些理论上的知识,希望有一个宏观上的概念。
比如点-线-面-体,>感知<~~>控制<的维度需要匹配等。更多详细内容可以查看:
机器人感知-视觉部分:https://blog.csdn.net/ZhangRelay/article/details/81352622
并思考:二维空间导航与三维空间抓取操作的异同之处?
 机器人的空间、时间和频率
机器人的空间、时间和频率
同时可以回顾,信息传输的时间与频率的关系,各种维度的信息需要的数据带宽。
书中40页先讲述了数字IO,然后在54页讲解了模拟IO。这些都是arduino本身具备的功能。
串口的使用(67页),类似于点对点的网络,使得其可以与其他单片机或各种支持串口通信的设备交互信息。
时间控制函数也需要理解后再掌握其用法。
arduino是一款典型的开源IoT设备,课程本身只针对讲解C语言编程和ROS接口。
但是arduino玩法是非常多了(APP与API),下面简单列一下,有兴趣的小伙伴可以自己动手尝试起来:
全仿真:7 best Arduino simulators for PC to use today
课程重点讲解Proteus 8 + Arduino:
 模拟输入调节LED闪烁时间
模拟输入调节LED闪烁时间
Matlab:完美支持,自主学习探索
 Arduino Support from MATLAB
Arduino Support from MATLAB
Python:Arduino-Python3-Command-API
 arduino-python教程
arduino-python教程
JavaScript:http://johnny-five.io/
 johnny-five
johnny-five
总之,目前主流的编程语言,都可以实现对Arduino直接或者间接代码调试!!!(ROS部分稍后详细介绍)
代码也不想写,可不可以呢?Scratch+Arduino,需要先安装插件。
 Chrome插件
Chrome插件
这里需要注意,下图中间的arduino指示灯:
 黄色-设备未连接
黄色-设备未连接
配置正确后,可以进行框图程序设计。
云端编程,免费的云端ROS学习体验环境可以参考如下链接:
https://www.shiyanlou.com/courses/854
arduino自然也提供了类似功能,不需要在本地安装arduino IDE:
 create
create
 原理示意图
原理示意图
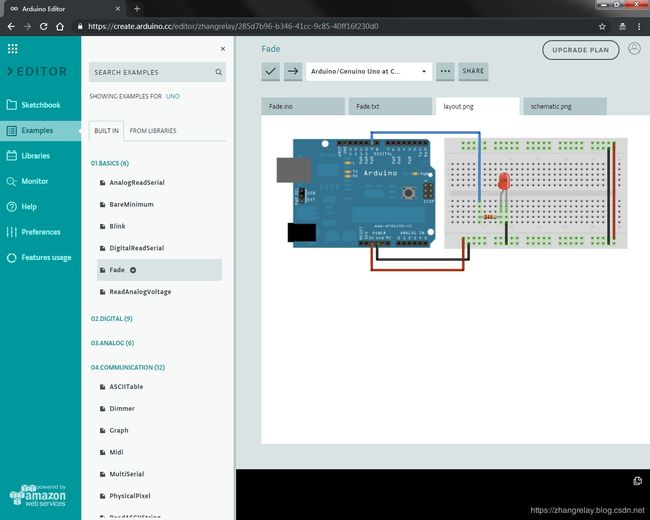 连线示意图
连线示意图
 编译程序并下载
编译程序并下载
 下载成功!
下载成功!
C语言编程官方案例
1.基础知识 Basics
- Analog Read Serial:读取电位计,将其状态输出到Arduino串行口监视器。
- Bare Minimum:启动Arduino所需的最少代码。
- Blink:打开和关闭LED。
- Digital Read Serial:读取开关量,将状态发布到Arduino串行监视器。
- Fade(呼吸灯):演示使用模拟输出实现渐变亮度的LED。
- Read Analog Voltage:读取模拟输入并将电压发布到串口监视器。
2.数字量 Digital
- Blink Without Delay:不使用延迟 delay() 功能使LED闪烁。
- Button:使用按钮控制LED。
- Debounce:读取一个按钮状态,过滤噪音。
- Digital Input Pullup:使用pinMode()演示INPUT_PULLUP的使用。
- State Change Detection:计算按钮按下的次数。
- Tone Keyboard:使用力传感器和压电扬声器的三键音乐键盘。
- Tone Melody:用压电扬声器演奏旋律。
- Tone Multiple:使用tone()命令依次在多个扬声器上播放音调。
- Tone Pitch Follower:根据模拟输入在压电扬声器上演奏音高。
3.模拟量 Analog
- Analog In Out Serial:读取模拟输入引脚,输出结果,然后使用该数据调暗或增亮LED。
- Analog Input:使用电位计控制LED的闪烁。
- Analog Write Mega:使用Arduino Mega板逐个打开和关闭12个LED。
- Calibration:定义预期模拟传感器值的最大值和最小值。
- Fading:使用模拟输出(PWM引脚)缓慢变化亮度的LED。
- Smoothing:平滑模拟输入的多个读数。
4.通信 Communication
这些示例包括允许Arduino与计算机上运行的Processing进行通信的代码。有关更多信息或下载Processing,请参阅processing.org。还有Max / MSP补丁也可以与每个Arduino进行通信。有关Max / MSP的更多信息,请参阅Cycling 74。
- ASCIITable:演示Arduino的高级串行输出功能。
- Dimmer:移动鼠标以改变LED的亮度。
- Graph:将数据发送到计算机并在Processing中绘制图表。
- Midi:连续发送MIDI音符信息。
- Multi Serial Mega:使用Arduino Mega上提供的两个串行端口。
- Physical Pixel:通过Processing或Max / MSP向Arduino发送数据来打开和关闭LED。
- Read ASCII String:解析以逗号分隔的整数字符串以调节LED亮度。
- Serial Call Response:使用呼叫和响应(握手)方法发送多个变量。
- Serial Call Response ASCII:使用呼叫和响应(握手)方法发送多个变量,并在发送之前对值进行ASCII编码。
- Serial Event:演示SerialEvent()的使用。
- Serial Passthrough:演示如何虚拟连接Serial和Serial1。
- Virtual Color Mixer:将多个变量从Arduino发送到您的计算机,并在Processing或Max / MSP中读取它们。
5.控制结构 Control Structures
- Arrays:For循环示例的变体,演示如何使用数组。
- For Loop Iteration:使用for循环和控制多个LED。
- If Statement Conditional:使用'if语句'根据更改输入条件更改输出条件。
- Switch Case:如何在离散数量的值之间进行选择。
- Switch Case 2:第二个switch-case示例,显示如何根据串行端口中收到的字符执行不同的操作。
- While Statement Conditional:如何在读取按钮时使用while循环校准传感器。
6.传感器 Sensors
- ADXL3xx:读取ADXL3xx加速度计。
- Knock:用压电元件检测敲击。
- Memsic2125:双轴加速度计。
- Ping:使用超声波测距仪检测物体。
7.显示 Display
- Bar Graph:制作LED条形图。
- RowColumnScanning:控制8x8 LED矩阵。
8.字符串 Strings
- Character Analysis:使用运算符识别我们正在处理的字符类型。
- String Addition Operator:以各种方式将字符串添加到一起。
- String Append Operator:使用+ =运算符和concat()方法将字符串附加到字符串。
- String Case Changes:更改字符串的大小写。
- String Characters:获取/设置字符串中特定字符的值。
- String Comparison Operators:按字母顺序比较字符串。
- String Constructors:初始化字符串对象。
- String Index Of:查找字符串中字符的第一个/最后一个实例。
- String Length & String Length Trim:获取并修剪字符串的长度。
- String Replace:替换字符串中的单个字符。
- String Start With Ends With:检查给定字符串的开头或结尾字符/子字符串。
- String Substring:查找给定字符串中的“短语”。
- String To Int:允许您将String转换为整数。
9. USB (此部分课程中不讲解C语言版本,UNO不支持!但是通过ROS可以UNO功能极大扩展)
键盘和鼠标示例是Leonardo,Micro和Due独有的。演示了如何使用板上独有的库。
键盘 KEYBOARD
- Keyboard Logout:使用键盘命令注销当前用户。
- Keyboard Message:按下按钮时发送文本字符串。
- Keyboard Reprogram:在Arduino IDE中打开一个新窗口,并使用简单的闪烁程序重新编程Leonardo。
- Keyboard Serial:从串行端口读取一个字节,然后发回键击。
- Keyboard Mouse Control:在一个程序中演示鼠标和键盘命令。
鼠标 MOUSE
- Button Mouse Control:使用5个按钮控制光标移动。
- Joystick Mouse Contol:按下按钮时,使用操纵杆控制计算机的光标移动。
10. Starterkit和BasicKit
套件中包含的Project Book中提供 了StarterKit示例的教程,如果您购买了BasicKit,将能够在Project Ignite上在线访问项目。
11. Arduino ISP
Arduino ISP将Arduino转变为在线编程器,重新编程AtMega芯片。如果需要在Arduino上重新加载引导加载程序,如果 从面板上的Arduino转到AtMega ,或者如果在面包板上制作自己的Arduino兼容电路,则非常有用。
ROS接口官方案例
- Arduino IDE设置
本教程逐步介绍如何设置Arduino IDE以使用rosserial。
- Hello World(发布器示例)
本教程逐步介绍如何使用rosserial创建发布器。
- 闪烁LED Blink(接收器示例)
本教程逐步介绍如何将rosserial与接收器一起使用。
- 记录rosserial
本教程逐步介绍了如何使用rosserial的日志记录。
- 使用时间和坐标变换TF
本教程介绍如何使用ros :: Time和TF在Arduino上创建tf发布者。
- 温度感应器
使用TMP102测量温度
- 按钮
监视按钮并在ROS中发布其状态
- 用rosserial_arduino来制作CMake
本教程介绍如何将CMake构建系统与rosserial_arduino一起使用。
- 伺服控制器示例
使用rosserial和Arduino控制R / C伺服的教程
- IR Ranger教程
使用带有rosserial和Arduino的IR Ranger
- SRF08超声波传感器
在本教程中,我们将使用Arduino和SRF08超声波传感器作为测距仪.SRF08通过SPI / I2C与Arduino通信。
- BlinkM教程
使用Arduino和rosserial通过ROS控制BlinkM
- Arduino示波器
在本教程中,我们将使用Arduino的ADC(模数转换器)和rqt_plot制作一个简易的示波器。
- NodeHandle和ArduinoHardware的高级配置。
本教程逐步介绍如何配置NodeHandle和ArduinoHareware以更好地满足用户需求。
rosserial overview:
-
NodeHandles and Initialization
-
Messages
-
Publishers and Subscribers
-
Time
-
Logging
-
Limitations
-
Protocol
-
Parameters
配置具体内容参考初识,链接如下:
https://blog.csdn.net/ZhangRelay/article/details/100385715
了解Arduino和ROS之后,如何将两者联系起来呢?
这里以最新版本的ROS 1 Melodic做介绍。安装对应功能包:
sudo apt install ros-melodic-rosserial-arduino
全部支持的串口通讯方式有:
ros-melodic-rosserial ros-melodic-rosserial-server
ros-melodic-rosserial-arduino ros-melodic-rosserial-server-dbgsym
ros-melodic-rosserial-client ros-melodic-rosserial-tivac
ros-melodic-rosserial-embeddedlinux ros-melodic-rosserial-vex-cortex
ros-melodic-rosserial-mbed ros-melodic-rosserial-vex-v5
ros-melodic-rosserial-msgs ros-melodic-rosserial-windows
ros-melodic-rosserial-python ros-melodic-rosserial-xbee
安装完成后,进行环境配置:
打开Arduino IDE(本文版本为1.8.9),直接进入库管理(library Manager),在搜索框输入ros查找:
rosserial arduino库
确保Rosserial Arduino Library 0.7.9安装完成。
这时候,就可以在文件File,示例Examples,自定义示例Costom中找到丰富的示例:
rosserial arduino library
打开一个示例看一看吧,Blink(ROS版本):
/*
* rosserial Subscriber Example
* Blinks an LED on callback
*/
#include
#include
ros::NodeHandle nh;
void messageCb( const std_msgs::Empty& toggle_msg){
digitalWrite(13, HIGH-digitalRead(13)); // blink the led
}
ros::Subscriber
void setup()
{
pinMode(13, OUTPUT);
nh.initNode();
nh.subscribe(sub);
}
void loop()
{
nh.spinOnce();
delay(1);
}
注意串口权限问题,sudo chmod 777 /dev/ttyACM0。/dev/ttyACM0为对应串口号。
程序上传至开发版后,依次运行如下命令:
1. roscore
2. rosrun rosserial_python serial_node.py /dev/ttyACM0
使用如下命令开关LED灯:
rostopic pub toggle_led std_msgs/Empty --once
闪烁:
rostopic pub toggle_led std_msgs/Empty -r 2
/*
* rosserial PubSub Example
* Prints "hello world!" and toggles led
*/
#include
#include
#include
ros::NodeHandle nh;
void messageCb( const std_msgs::Empty& toggle_msg){
digitalWrite(13, HIGH-digitalRead(13)); // blink the led
}
ros::Subscriber
std_msgs::String str_msg;
ros::Publisher chatter("chatter", &str_msg);
char hello[13] = "hello world!";
void setup()
{
pinMode(13, OUTPUT);
nh.initNode();
nh.advertise(chatter);
nh.subscribe(sub);
}
void loop()
{
str_msg.data = hello;
chatter.publish( &str_msg );
nh.spinOnce();
delay(500);
}
pubsub
rosgraph
————————————————