Rcnn 中的边框回归学习(部分源码分析)
最近了解了一下Rcnn系列,里面有边框回归步骤,以前就很不解,是如何回归边框的,花了一下午看了下论文,总结一下,如有错误,请指正。。。
边框回归的作用:可以提高分类的准确率。。
通过边框回归,可以让目标检测预测出的框和正确的框的重合比增加,如下图(网上盗的图片):

如图,将红色框转换为接近绿色框之后,提高交并比。大致步骤如下
- 传入图片bounding-box的四个值,分别为Px, Py, Pw, Ph,为图片的中心点坐标,和宽和高,还有对应的正确的框(Gx, Gy, Gw, Gh)
- 训练四个函数,分别为dx(P), dy(P), dw(P), dh(P)这四个函数对上面传入的bounding-box的四个值进变换,公式如下:
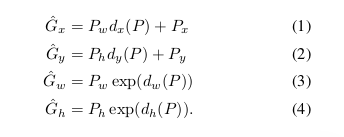
得到的新的四个值就是预测出的bounding-box了,其中d*的函数如下:
![]()
(注:这里的P是pool5 的特征,原文中:Each function d (P ) (where is one of x, y, h, w) is
modeled as a linear function of the pool 5 features of pro-
posal P , denoted by φ 5 (P ).)
要让(1)、(2)、(3)、(4)接近真实的值(ground-truth bounding-box)则带入真实值,解出d对应的t即可:

得到优化函数:

下面是部分源码注解,个人理解,若有偏差,希望指正。。。。
rcnn_train_bbox_regressor.m
这里主要是得到四个 t 对应的W的值
function bbox_reg = rcnn_train_bbox_regressor(imdb, rcnn_model, varargin)
% bbox_reg = rcnn_train_bbox_regressor(imdb, rcnn_model, varargin)
% Trains a bounding box regressor on the image database imdb
% for use with the R-CNN model rcnn_model. The regressor is trained
% using ridge regression.
%
% Keys that can be passed in:
%
% min_overlap Proposal boxes with this much overlap or more are used
% layer The CNN layer features to regress from (either 5, 6 or 7)
% lambda The regularization hyperparameter in ridge regression
% robust Throw away examples with loss in the top [robust]-quantile
% binarize Binarize features or leave as real values >= 0
% AUTORIGHTS
% ---------------------------------------------------------
% Copyright (c) 2014, Ross Girshick
%
% This file is part of the R-CNN code and is available
% under the terms of the Simplified BSD License provided in
% LICENSE. Please retain this notice and LICENSE if you use
% this file (or any portion of it) in your project.
% ---------------------------------------------------------
ip = inputParser;
ip.addRequired('imdb', @isstruct);
ip.addRequired('rcnn_model', @isstruct);
% 回归阈值设为0.6
ip.addParamValue('min_overlap', 0.6, @isscalar);
ip.addParamValue('layer', 5, @isscalar);
ip.addParamValue('lambda', 1000, @isscalar);
ip.addParamValue('robust', 0, @isscalar);
ip.addParamValue('binarize', false, @islogical);
ip.parse(imdb, rcnn_model, varargin{:});
opts = ip.Results;
opts = rmfield(opts, 'rcnn_model');
opts = rmfield(opts, 'imdb');
opts.cache_name = rcnn_model.cache_name;
fprintf('\n\n~~~~~~~~~~~~~~~~~~~~~~~~~~~~\n');
fprintf('Training options:\n');
disp(opts);
fprintf('~~~~~~~~~~~~~~~~~~~~~~~~~~~~\n\n');
conf = rcnn_config('sub_dir', imdb.name);
clss = rcnn_model.classes;
num_clss = length(clss);
% ------------------------------------------------------------------------
% Get the average norm of the features
opts.feat_norm_mean = rcnn_feature_stats(imdb, opts.layer, rcnn_model);
fprintf('average norm = %.3f\n', opts.feat_norm_mean);
% ------------------------------------------------------------------------
% ------------------------------------------------------------------------
% Get all positive examples
save_file = sprintf('./feat_cache/%s/%s/bbox_regressor_XY_layer_5_overlap_0.5.mat', ...
rcnn_model.cache_name, imdb.name);
try
load(save_file);
fprintf('Loaded saved positives from ground truth boxes\n');
catch
[X, Y, O, C] = get_examples(rcnn_model, imdb, opts);
save(save_file, 'X', 'Y', 'O', 'C', '-v7.3');
end
for i = 1:num_clss
fprintf('%14s has %6d samples\n', rcnn_model.classes{i}, length(find(C == i)));
end
X = rcnn_pool5_to_fcX(X, opts.layer, rcnn_model);
% X拿出pool5的特征
X = rcnn_scale_features(X, opts.feat_norm_mean);
% ------------------------------------------------------------------------
% use ridge regression solved by cholesky factorization
method = 'ridge_reg_chol';
models = cell(num_clss, 1);
% 按照每一类进行回归
for i = 1:num_clss
fprintf('Training regressors for class %s (%d/%d)\n', ...
rcnn_model.classes{i}, i, num_clss);
% 大于min_overlap
I = find(O > opts.min_overlap & C == i);
Xi = X(I,:);
if opts.binarize
Xi = single(Xi > 0);
end
Yi = Y(I,:);
Oi = O(I);
Ci = C(I);
% add bias feature
Xi = cat(2, Xi, ones(size(Xi,1), 1, class(Xi)));
% Center and decorrelate targets
% 这里是将Yi的每个值进行先求出均值,再对每个值减去均值
mu = mean(Yi);
Yi = bsxfun(@minus, Yi, mu);
% 协方差矩阵
S = Yi'*Yi / size(Yi,1);
% 求协方差矩阵的特征向量和特征值
[V, D] = eig(S);
% 对角化
D = diag(D);
% 感觉下面是在求了一个S的逆(T),感觉下面是在求了一个S的逆(T),应该是为逆白化做准备,这里不确定
T = V*diag(1./sqrt(D+0.001))*V';
T_inv = V*diag(sqrt(D+0.001))*V';
Yi = Yi * T;
models{i}.mu = mu;
models{i}.T = T;
models{i}.T_inv = T_inv;
% 对四个值进行处理,每个值返回的是相应的W和loss.
models{i}.Beta = [ ...
solve_robust(Xi, Yi(:,1), opts.lambda, method, opts.robust) ...
solve_robust(Xi, Yi(:,2), opts.lambda, method, opts.robust) ...
solve_robust(Xi, Yi(:,3), opts.lambda, method, opts.robust) ...
solve_robust(Xi, Yi(:,4), opts.lambda, method, opts.robust)];
end
bbox_reg.models = models;
bbox_reg.training_opts = opts;
save([conf.cache_dir 'bbox_regressor_final'], 'bbox_reg');
% ------------------------------------------------------------------------
function [X, Y, O, C] = get_examples(rcnn_model, imdb, opts)
% ------------------------------------------------------------------------
% 得到有多少类
num_classes = length(rcnn_model.classes);
pool5 = 5;
roidb = imdb.roidb_func(imdb);
cls_counts = zeros(num_classes, 1);
for i = 1:length(imdb.image_ids)
tic_toc_print('%s: counting %d/%d\n', ...
procid(), i, length(imdb.image_ids));
d = roidb.rois(i);
[max_ov cls] = max(d.overlap, [], 2);
sel_ex = find(max_ov >= 0.5);
cls = cls(sel_ex);
for j = 1:length(sel_ex)
cls_counts(cls(j)) = cls_counts(cls(j)) + 1;
end
end
total = sum(cls_counts);
feat_dim = size(rcnn_model.cnn.layers(pool5+1).weights{1},1);
% features
% pool5的特征
X = zeros(total, feat_dim, 'single');
% target values
% 要处理的四个值x,y,w,h
Y = zeros(total, 4, 'single');
% overlap amounts
% 覆盖的大小
O = zeros(total, 1, 'single');
% classes
C = zeros(total, 1, 'single');
cur = 1;
for i = 1:length(imdb.image_ids)
tic_toc_print('%s: pos features %d/%d\n', ...
procid(), i, length(imdb.image_ids));
d = rcnn_load_cached_pool5_features(rcnn_model.cache_name, ...
imdb.name, imdb.image_ids{i});
sel_gt = find(d.class > 0);
gt_boxes = d.boxes(sel_gt, :);
gt_classes = d.class(sel_gt);
max_ov = max(d.overlap, [], 2);
sel_ex = find(max_ov >= opts.min_overlap);
ex_boxes = d.boxes(sel_ex, :);
X(cur+(0:length(sel_ex)-1), :) = d.feat(sel_ex, :);
for j = 1:size(ex_boxes, 1)
ex_box = ex_boxes(j, :);
ov = boxoverlap(gt_boxes, ex_box);
[max_ov, assignment] = max(ov);
gt_box = gt_boxes(assignment, :);
cls = gt_classes(assignment);
% 得到预测的四个值
src_w = ex_box(3) - ex_box(1) + eps;
src_h = ex_box(4) - ex_box(2) + eps;
src_ctr_x = ex_box(1) + 0.5*src_w;
src_ctr_y = ex_box(2) + 0.5*src_h;
% 真实的四个值
gt_w = gt_box(3) - gt_box(1) + eps;
gt_h = gt_box(4) - gt_box(2) + eps;
gt_ctr_x = gt_box(1) + 0.5*gt_w;
gt_ctr_y = gt_box(2) + 0.5*gt_h;
% 论文中的t的四个值
dst_ctr_x = (gt_ctr_x - src_ctr_x) * 1/src_w;
dst_ctr_y = (gt_ctr_y - src_ctr_y) * 1/src_h;
dst_scl_w = log(gt_w / src_w);
dst_scl_h = log(gt_h / src_h);
target = [dst_ctr_x dst_ctr_y dst_scl_w dst_scl_h];
if 0
% debugging visualizations and checks
im = imread(imdb.image_at(i));
showboxesc(im, gt_box, 'g', '-');
showboxesc([], ex_box, 'r', '-');
hold on;
plot(gt_ctr_x, gt_ctr_y, 'gd');
plot(src_ctr_x, src_ctr_y, 'rd');
hold off;
fprintf('target = [%.3f %.3f %.3f %.3f]\n', target(1), target(2), target(3), target(4));
fprintf('cls = %s\n', rcnn_model.classes{cls});
% check that we can correctly reconstruct the gt_box from the
% gold-standard target
pred_ctr_x = (target(1) * src_w) + src_ctr_x;
pred_ctr_y = (target(2) * src_h) + src_ctr_y;
pred_w = exp(target(3)) * src_w;
pred_h = exp(target(4)) * src_h;
pred_box = [pred_ctr_x - 0.5*pred_w, pred_ctr_y - 0.5*pred_h, ...
pred_ctr_x + 0.5*pred_w, pred_ctr_y + 0.5*pred_h];
disp(pred_box);
disp(gt_box);
assert(sum(abs(pred_box - gt_box)) < 0.0001);
pause;
end
assert(cur <= total);
Y(cur, :) = target;
O(cur) = max_ov;
C(cur) = cls;
cur = cur + 1;
end
end
% ------------------------------------------------------------------------
function [x, losses] = solve_robust(A, y, lambda, method, qtile)
% A:pool5的特征,y是四个target
% ------------------------------------------------------------------------
[x, losses] = solve(A, y, lambda, method);
fprintf('loss = %.3f\n', mean(losses));
if qtile > 0
thresh = quantile(losses, 1-qtile);
I = find(losses < thresh);
[x, losses] = solve(A(I,:), y(I), lambda, method);
fprintf('loss (robust) = %.3f\n', mean(losses));
end
% ------------------------------------------------------------------------
function [x, losses] = solve(A, y, lambda, method)
% 这里个人理解,是直接利用某些优化方法推导出矩阵x的最优解,并计算了losses
% ------------------------------------------------------------------------
%tic;
switch method
case 'ridge_reg_chol'
% Cholesky分解,R是上三角,对应的R'是下三角
% solve for x in min_x ||Ax - y||^2 + lambda*||x||^2
%
% solve (A'A + lambdaI)x = A'y for x using cholesky factorization
% R'R = (A'A + lambdaI)
% R'z = A'y : solve for z => R'Rx = R'z => Rx = z
% Rx = z : solve for x
R = chol(A'*A + lambda*eye(size(A,2)));
z = R' \ (A'*y);
x = R \ z;
case 'ridge_reg_inv'
% solve for x in min_x ||Ax - y||^2 + lambda*||x||^2
x = inv(A'*A + lambda*eye(size(A,2)))*A'*y;
case 'ls_mldivide'
% solve for x in min_x ||Ax - y||^2
if lambda > 0
warning('ignoring lambda; no regularization used');
end
x = A\y;
end
%toc;
% losses = 1/2*(A*x - y).^2 A:pool5的特征,x是参数矩阵,y是对应的那个target
losses = 0.5 * (A*x - y).^2;上面求出了论文中的d*,在预测的时候,就可以用了
function pred_boxes = ...
rcnn_predict_bbox_regressor(model, feat, ex_boxes)
% pred_boxes = rcnn_predict_bbox_regressor(model, feat, ex_boxes)
% Predicts a new bounding box from CNN features computed on input
% bounding boxes.
%
% Inputs
% model Bounding box regressor from rcnn_train_bbox_regressor.m
% feat Input feature vectors
% ex_boxes Input bounding boxes
%
% Outputs
% pred_boxes Modified (hopefully better) ex_boxes
% AUTORIGHTS
% ---------------------------------------------------------
% Copyright (c) 2014, Ross Girshick
%
% This file is part of the R-CNN code and is available
% under the terms of the Simplified BSD License provided in
% LICENSE. Please retain this notice and LICENSE if you use
% this file (or any portion of it) in your project.
% ---------------------------------------------------------
if isempty(ex_boxes)
pred_boxes = [];
return;
end
% Predict regression targets
% 这里将 rcnn_train_bbox_regressor.m 产生的值用来预测
% 这里是 特征×权重+偏置,对应论文中的 d = W^T * X
Y = bsxfun(@plus, feat*model.Beta(1:end-1, :), model.Beta(end, :));
% Invert whitening transformation
% 个人理解,这里是逆白化变换
Y = bsxfun(@plus, Y*model.T_inv, model.mu);
% Read out predictions
% 这里dst就是论文中的d*
dst_ctr_x = Y(:,1);
dst_ctr_y = Y(:,2);
dst_scl_x = Y(:,3);
dst_scl_y = Y(:,4);
src_w = ex_boxes(:,3) - ex_boxes(:,1) + eps;
src_h = ex_boxes(:,4) - ex_boxes(:,2) + eps;
src_ctr_x = ex_boxes(:,1) + 0.5*src_w;
src_ctr_y = ex_boxes(:,2) + 0.5*src_h;
% 这里对应论文中(1)、(2)、(3)、(4)公式
pred_ctr_x = (dst_ctr_x .* src_w) + src_ctr_x;
pred_ctr_y = (dst_ctr_y .* src_h) + src_ctr_y;
pred_w = exp(dst_scl_x) .* src_w;
pred_h = exp(dst_scl_y) .* src_h;
pred_boxes = [pred_ctr_x - 0.5*pred_w, pred_ctr_y - 0.5*pred_h, ...
pred_ctr_x + 0.5*pred_w, pred_ctr_y + 0.5*pred_h];