智能车教程(红外、蓝牙、OpenMV追踪)
动手制作一个智能小车教程未完成
能亲手制作智能车、机器人,大概是我们每一位marker都想实现的事情,那么今天我们就来看看如何制作一辆可以红外、蓝牙控制,并且可以用openmv摄像头实时追踪色块的智能车吧。
文章目录
- 动手制作一个智能小车==教程未完成==
- 1.小车功能设计
- 2.应用学到那些知识
- 3.材料准备
- 4.组装小车
- 5.制作红外小车
- 6.添加蓝牙控制功能
- 7.添加OpenMV颜色追踪功能
- 8.项目总结
1.小车功能设计
现在我们手上有一套智能车模型套件、红外遥控器及传感器、蓝牙模块、一块OpenMV摄像头模块。
- 首先,要快速完成一辆小车的制作,我们可以选用智能车模型套件,直接拼装成智能车,这可以节省我们不少设计的功夫,将精力放在功能实现上面。
- 其次,我们可以使用红外遥控和红外接收模块,对小车进行红外控制;
- 再次,我们可以通过蓝牙模块,通过手机app,蓝牙远程遥控智能车;
- 最后,车子要做到智能,那必不可少的就是图像识别,我们可以使用OpenMV摄像头对颜色进行实时识别和跟踪。
那就让我们开始实现以上的想法吧,JUST DO IT!
2.应用学到那些知识
做这个项目之前,你需要有:
- 一点基础的编程语法知识(任何语言)
- 一颗耐心和创客的激情
做完这个项目,你可以掌握:
- 电机驱动板L298N的使用方法
- arduino的使用方法
- 红外模块的使用方法
- 蓝牙模块HC-05的调试方法
- 手机控制蓝牙的方法
- OpenMV摄像头模块颜色识别的方法
- OpenMV与arduino板子通信的方法
3.材料准备
1.智能车部分:模型套件,如下图

2.控制电路部分:如下表
| 材料 | 数量 |
|---|---|
| arduino模块 | 1块 |
| L298N电机驱动模块 | 1块 |
| 红外接收模块 | 1块 |
| 红外遥控器 | 1件 |
| 蓝牙模块 | 1块 |
| USB转TTL模块(可选) | 1块 |
| OpenMV3 摄像头模块 | 1块 |
| 9-12V电源(博主使用三节18560串联,推荐) | 1件 |
| 杜邦线 | 若干 |
| 螺丝、螺母、铜柱 | 若干 |
| 热熔胶枪 | 1把 |
| 螺丝刀套件 | 1套 |
| L298N电机驱动模块 | 1块 |
| 焊烙铁(可选) | 1件 |
| 剥线钳(可选) | 1把 |
| 电压表(可选) | 1件 |
| android手机(使用软件) | 1部 |
3.摄像头部分:OpenMV摄像头模块,如下图

4.组装小车
按照说明书装配小车模型。
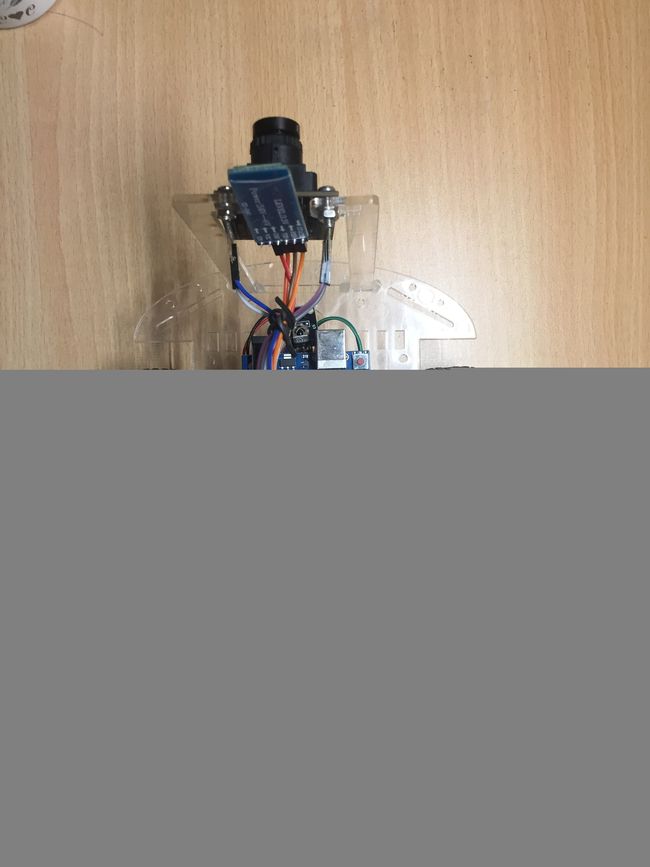
电子模块我是如下图安装的,当然大家可以按照自己的习惯安装。
注意:
- 导线可以先不接,之后可以根据每一次实现的功能再接
- 连接OpenMV的支架为博主自行切割的,大家可以动手自己设计支架


5.制作红外小车
准备工作都做好了,那我们开始动手制作最简单的红外小车吧。
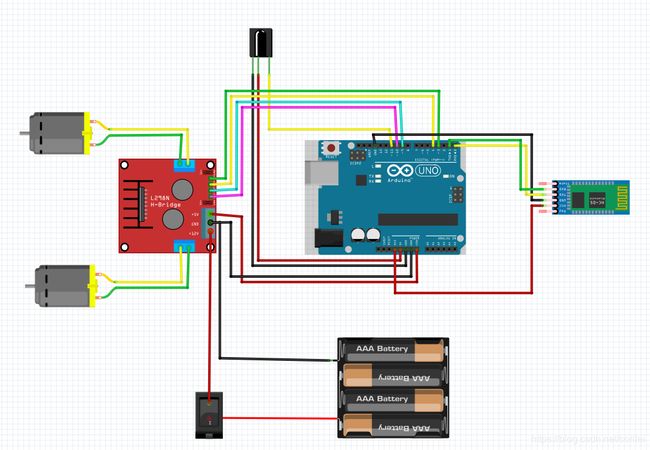
- 如下图连接杜邦线

- 电路原理
- 红外接收器
- L298N电机驱动板
- 电源选择
- Arduino UNO引脚分类与供电方式
- 打开Arduino开发环境并添加库文件,如未安装,点击这里
- 上传代码
//红外小车代码及解释
#include - 测试成果
6.添加蓝牙控制功能
- 如下图连接杜邦线
- 电路原理及注意
- HC-05蓝牙模块原理
- 蓝牙模块与Arduino交叉连接(即蓝牙RX连接板子TX、蓝牙TX连接板子RX)
- 此处红外模块无需拆下,红外接线对蓝牙功能没有影响,正好同时使用两种功能
- 上传代码
//蓝牙小车代码及解释
#include - 手机安装蓝牙控制app 1,连接蓝牙,控制小车
- 下载安装软件
- 小车通电
- 打开软件,点击左下角连接小车蓝牙
- 控制小车
- 测试成果
7.添加OpenMV颜色追踪功能
- 如下图连接杜邦线

- 电路原理及注意
- OpenMV教程参考1、参考2(需要先学习)
- 此项目是将OpenMV3作为从设备,Arduino作为主设备控制电机的
- 上传代码
Arduino代码
/*
* 蓝牙串口指令规定
* 改变运行模式:红外:I(默认)、蓝牙:B、openmv:O
* 蓝牙控制参数设置:前进:1、后退:2、左转:3、右转:4、停车:0、油门:5、刹车:6
*/
#include OpenMV代码
#car.py
# Arduino 作为I2C主设备, OpenMV作为I2C从设备。
#
# 请把OpenMV和Arduino按照下面连线:
#
# OpenMV Cam Master I2C Data (P5) - Arduino Uno Data (A4)
# OpenMV Cam Master I2C Clock (P4) - Arduino Uno Clock (A5)
# OpenMV Cam Ground - Arduino Ground
import pyb, ustruct
import ujson
from pyb import Pin, Timer
text = "Hello World!\n"
data = ustruct.pack("<%ds" % len(text), text)
# 使用 "ustruct" 来生成需要发送的数据包
# "<" 把数据以小端序放进struct中
# "%ds" 把字符串放进数据流,比如:"13s" 对应的 "Hello World!\n" (13 chars).
# 详见 https://docs.python.org/3/library/struct.html
# READ ME!!!
#
# 请理解,当您的OpenMV摄像头不是I2C主设备,所以不管是使用中断回调,
# 还是下方的轮循,都可能会错过响应发送数据给主机。当这种情况发生时,
# Arduino会获得NAK,并且不得不从OpenMV再次读数据。请注意,
# OpenMV和Arduino都不擅长解决I2C的错误。在OpenMV和Arduino中,
# 你可以通过释放I2C外设,再重新初始化外设,来恢复功能。
# OpenMV上的硬件I2C总线都是2
bus = pyb.I2C(2, pyb.I2C.SLAVE, addr=0x12)
bus.deinit() # 完全关闭设备
bus = pyb.I2C(2, pyb.I2C.SLAVE, addr=0x12)
print("Waiting for Arduino...")
# 请注意,为了正常同步工作,OpenMV Cam必须 在Arduino轮询数据之前运行此脚本。
# 否则,I2C字节帧会变得乱七八糟。所以,保持Arduino在reset状态,
# 直到OpenMV显示“Waiting for Arduino...”。
def run(left_speed, right_speed):
data = str(left_speed)+" "+str(right_speed)+" "
try:
#print(data)
bus.send(ustruct.pack(", len(data)), timeout=10000) # 首先发送长度 (16-bits).
try:
bus.send(data, timeout=10000) # 然后发送数据
print("Sent Data!") # 没有遇到错误时,会显示
except OSError as err:
pass # 不用担心遇到错误,会跳过
# 请注意,有3个可能的错误。 超时错误(timeout error),
# 通用错误(general purpose error)或繁忙错误
#(busy error)。 “err.arg[0]”的错误代码分别
# 为116,5,16。
except OSError as err:
pass # 不用担心遇到错误,会跳过
# 请注意,有3个可能的错误。 超时错误(timeout error),
# 通用错误(general purpose error)或繁忙错误
#(busy error)。 “err.arg[0]”的错误代码分别
# 为116,5,16。
#pid.py
from pyb import millis
from math import pi, isnan
class PID:
_kp = _ki = _kd = _integrator = _imax = 0
_last_error = _last_derivative = _last_t = 0
_RC = 1/(2 * pi * 20)
def __init__(self, p=0, i=0, d=0, imax=0):
self._kp = float(p)
self._ki = float(i)
self._kd = float(d)
self._imax = abs(imax)
self._last_derivative = float('nan')
def get_pid(self, error, scaler):
tnow = millis()
dt = tnow - self._last_t
output = 0
if self._last_t == 0 or dt > 1000:
dt = 0
self.reset_I()
self._last_t = tnow
delta_time = float(dt) / float(1000)
output += error * self._kp
if abs(self._kd) > 0 and dt > 0:
if isnan(self._last_derivative):
derivative = 0
self._last_derivative = 0
else:
derivative = (error - self._last_error) / delta_time
derivative = self._last_derivative + \
((delta_time / (self._RC + delta_time)) * \
(derivative - self._last_derivative))
self._last_error = error
self._last_derivative = derivative
output += self._kd * derivative
output *= scaler
if abs(self._ki) > 0 and dt > 0:
self._integrator += (error * self._ki) * scaler * delta_time
if self._integrator < -self._imax: self._integrator = -self._imax
elif self._integrator > self._imax: self._integrator = self._imax
output += self._integrator
return output
def reset_I(self):
self._integrator = 0
self._last_derivative = float('nan')
#main.py
# Blob Detection Example
#
# This example shows off how to use the find_blobs function to find color
# blobs in the image. This example in particular looks for dark green objects.
import sensor, image, time
import car
from pid import PID
# You may need to tweak the above settings for tracking green things...
# Select an area in the Framebuffer to copy the color settings.
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # use RGB565.
sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed.
sensor.skip_frames(10) # Let new settings take affect.
sensor.set_auto_whitebal(False) # turn this off.
clock = time.clock() # Tracks FPS.
# For color tracking to work really well you should ideally be in a very, very,
# very, controlled enviroment where the lighting is constant...
green_threshold = (42, 80, 28, 127, -22, 55) # 颜色阈值,不同物体需要修改
size_threshold = 2000 #小球距离
x_pid = PID(p=0.1, i=0.2, imax=30) # 方向参数p
h_pid = PID(p=0.01, i=0.1, imax=100) # 速度参数p
def find_max(blobs): #找到视野中最大的色块,即最大的小球
max_size=0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_blob=blob
max_size = blob[2]*blob[3]
return max_blob
while(True):
clock.tick() # Track elapsed milliseconds between snapshots().
img = sensor.snapshot() # Take a picture and return the image.
blobs = img.find_blobs([green_threshold])
if blobs:
max_blob = find_max(blobs)
x_error = max_blob[5]-img.width()/2 #色块的外框的中心x坐标blob[5]
h_error = max_blob[2]*max_blob[3]-size_threshold
#色块的外框的宽度blob[2],色块的外框的高度blob[3]
print("x error: ", x_error) #打印 x 轴误差 用于转弯
print("h error: ", h_error) #打印 距离误差 用于速度
'''
for b in blobs:
# Draw a rect around the blob.
img.draw_rectangle(b[0:4]) # rect
img.draw_cross(b[5], b[6]) # cx, cy
'''
img.draw_rectangle(max_blob[0:4]) # rect
img.draw_cross(max_blob[5], max_blob[6]) # cx, cy
x_output=x_pid.get_pid(x_error,1)
h_output=h_pid.get_pid(h_error,1) #h_error调整后的值
print("x_output",x_output)
print("h_output",h_output)
car.run(-h_output-x_output,-h_output+x_output)
print(-h_output-x_output,-h_output+x_output)
else:
car.run(0,0)
- 测试成果
8.项目总结



此款app是根据@单片机菜鸟(博哥)蓝牙小车项目的app基础上修改。博哥在创客、esp8266、软件编程等领域都是令人钦佩的一位技术大拿,有开源精神,向他学习! ↩︎