迭代法求模型的参数
迭代优化:
文章目录
- 迭代优化:
- 牛顿-- 拉夫逊方法 (Newton-Raphson method)解非线性方程:
- 问题描述:
- python 代码测试:
- 扩展到多自变量,多因变量,理论分析如下:
- 联系到这里Calibration具体问题域分析:
- 参考
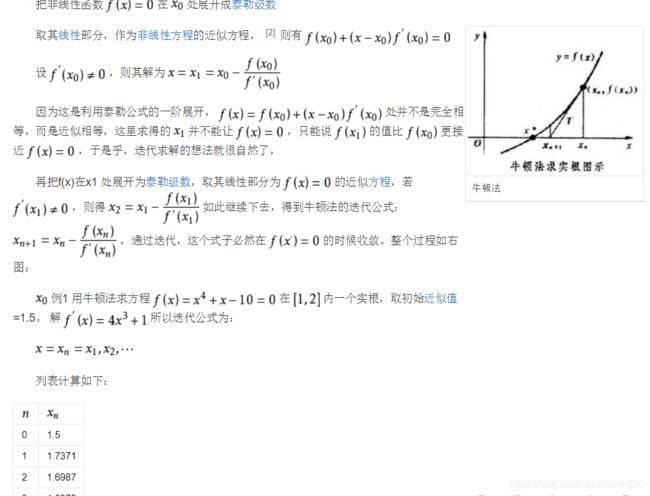
牛顿-- 拉夫逊方法 (Newton-Raphson method)解非线性方程:
问题描述:
为了简单起见使用一个自变量的模型来说明,
假设我们有一个函数模型 y = f ( x ) = k 2 ∗ x 3 y=f(x)=k^2*x^3 y=f(x)=k2∗x3,其中 f ( x ) f(x) f(x)中有一些未知的参数 k k k未知。而我们已知对应的 x 0 , y 0 x_0,y_0 x0,y0, 怎么计算出未知的 k k k呢?不准用解析法。
问题转化:因为这里的 x x x 是已知的 x 0 x_0 x0, k k k才是未知的。所以令 g ( k ) = x 0 3 k 2 − y 0 g(k)=x_0^3k^2 -y_0 g(k)=x03k2−y0, 那么 k = ? k=? k=? 能使得 g ( k ) = x 0 3 ∗ k 2 − y 0 = 0 g(k)=x_0^3*k^2 -y_0=0 g(k)=x03∗k2−y0=0呢?==>到此可以看出问题已经转化为 g ( k ) = 0 g(k)=0 g(k)=0, 方程求解问题了。因此可以利用牛顿法解非线性方程。步骤如下:
- S1:先给 k k k一个任意的初始值 k 0 k_0 k0,正向计算 g ( k 0 ) = x 0 3 k 0 2 − y 0 g(k_0)=x_0^3k_0^2-y_0 g(k0)=x03k02−y0,注意:这里的 g ( k 0 ) = f ( x 0 ) − y 0 g(k_0)=f(x_0)-y_0 g(k0)=f(x0)−y0,就是原函数的 Δ y \Delta y Δy
- S2:计算 g ′ ( k ) = 2 x 0 3 k 0 g^{'}(k)=2x_0^3k_0 g′(k)=2x03k0在 k 0 k_0 k0处的导数。
- S3:计算 Δ k = g ( k 0 ) g ′ ( k 0 ) \Delta k={g(k_0) \over g^{'}(k_0)} Δk=g′(k0)g(k0).
- 更新 k = k 0 − Δ k k=k_0 -\Delta k k=k0−Δk
- 重复S1-S3 直到 Δ k \Delta k Δk 小于一个很小很小的值
python 代码测试:
import os
# support our function is y=k^2*x**3, k=10,we give a x0 and y0, please according x0,y0, fit our function.
#k=10
x0=2
y0=800
def func(k,x):
y=k**2*x**3
return y
#df =2k*x**3
def derivative(k,x):
y=2*k*x**3
return y
#initial
k=99
# Optimization
for intr in range(0,300):
y = func(k,x0)
delta_y = y-y0 #S1
df = derivative(k,x0) #s2
#print(y,df,delta_y)
delta_k = delta_y/df
print("delta_k",delta_k)
k = k - delta_k #S3
print("k=",k,intr)
if abs(delta_k) < 0.0001:
break
执行的结果如下:
delta_k 48.994949494949495
k= 50.005050505050505 0
delta_k 24.002626252424253
k= 26.002424252626252 1
delta_k 11.078314495145142
k= 14.92410975748111 2
delta_k 4.1117712898024505
k= 10.81233846767866 3
delta_k 0.7818226922040425
k= 10.030515775474619 4
delta_k 0.030469356498084566
k= 10.000046418976535 5
delta_k 4.6418868798972104e-05
k= 10.000000000107736 6
扩展到多自变量,多因变量,理论分析如下:
牛顿迭代法可以推广到多元非线性方程组 F(x)=0的情况,称为牛顿-- 拉夫逊方法 (Newton-Raphson method). 当 F ( x ) F(x) F(x) 关于 x x x 的 Jacobi 矩阵 J ( x ) = ( ∂ F ∂ x ) \boldsymbol{J}(\boldsymbol{x}) = (\cfrac{\partial \boldsymbol{F}}{\partial \boldsymbol{x}}) J(x)=(∂x∂F) 可逆时, 有
x ( k + 1 ) = x ( k ) − J − 1 ( x ( k ) ) F ( x ( k ) ) , \boldsymbol{x}^{(k+1)}=\boldsymbol{x}^{(k)}- \boldsymbol{J}^{-1}(\boldsymbol{x}^{(k)})\boldsymbol{F}(\boldsymbol{x}^{(k)}), x(k+1)=x(k)−J−1(x(k))F(x(k)),,
求解步骤:
求解非线性方程组的Newton-Raphson方法:
1、 取初始点 x(0),最大迭代次数 N 和精度要求 ε, 置 k=0;
2、 求解线性方程组 J ( x k ) d = − F ( x k ) J(x^k)d=−F(x^k) J(xk)d=−F(xk);
3、 若 |d|<ε, 则停止计算;否则,置 x k + 1 = x k + d k x^{k+1}=x^k+d^k xk+1=xk+dk;
4、 若 k=N, 则停止计算;否则,置 k=k+1, 转(2).
联系到这里Calibration具体问题域分析:
假设有15 个自变量( k 0 , k 1 , ⋯ , k 14 k_0,k_1,\cdots,k_{14} k0,k1,⋯,k14),2 个因变量( u , v u,v u,v)
模型是很复杂的非线性模型 f ( X , Y , Z ) = [ u , v ] f(X,Y,Z)=[u,v] f(X,Y,Z)=[u,v], 其中模型里有15 个未知的参数 k 0 , k 1 , ⋯ , k 14 k_0,k_1,\cdots,k_{14} k0,k1,⋯,k14
已知: u i , v i ⇐ ⇒ X i , Y i , Z i u_i,v_i \Leftarrow\Rightarrow X_i,Y_i,Z_i ui,vi⇐⇒Xi,Yi,Zi, i = [ 1 ⋯ N ] i=[1 \cdots N] i=[1⋯N] 共N组数据对.
求:参数 k 0 , k 1 , ⋯ , k 14 k_0,k_1,\cdots,k_{14} k0,k1,⋯,k14
结合opencv 源代码,做简单分析,就不对细节展开:
while (change > 1e-10 && iter < MaxIter)
{
std::vector<Point2d> x;
Mat jacobians;
projectPoints(objectPoints, x, rvec, tvec, param, jacobians);// 求解处u,v 对15 个参数的偏导,构成一个 雅克比矩阵。
Mat ex = imagePoints - Mat(x).t(); // 这里计算的是-F(xⁿ),此处n=k,相当于 -Δy
ex = ex.reshape(1, 2);
J = jacobians.colRange(8, 14).clone();//只取外参6 个参数组成的jacobian 矩阵。
SVD svd(J, SVD::NO_UV);
double condJJ = svd.w.at<double>(0)/svd.w.at<double>(5);
if (condJJ > thresh_cond)
change = 0;
else
{
Vec6d param_innov;
solve(J, ex.reshape(1, (int)ex.total()), param_innov, DECOMP_SVD + DECOMP_NORMAL); // 上面的第2步,解线性方程组
Vec6d param_up = extrinsics + param_innov; / 更新参数,第3 步
change = norm(param_innov)/norm(param_up);
extrinsics = param_up;
iter = iter + 1; //继续迭代, 第4步。
rvec = Mat(Vec3d(extrinsics.val));
tvec = Mat(Vec3d(extrinsics.val+3));
}
}
参考
https://baike.baidu.com/item/牛顿法/1384129?fr=aladdin
https://www.cnblogs.com/cidpmath/articles/6032051.html