毫米波雷达SLAM:利用TI IWR1443+ROS+NVIDIA JTX+TurtleBot2实现(上)
目录
- IWR1443ROS驱动安装&工作原理解析
- 驱动安装
- 0、前期准备
- 1、下载源码
- 2、准备雷达
- 3、编译源码
- 4、测试驱动
- 驱动解析
- 一、文件结构
- 二、服务
- 三、节点
- 四、数据解包
IWR1443ROS驱动安装&工作原理解析
服务器和必备的各种IDE已经准备完毕(RE0)。从这一章(RE1)开始利用IWR1443毫米波雷达配合JTX1和turtelBot2复现TI公司的SLAM建图实验。本文先介绍一下如何编译和使用IWR1443雷达驱动以及简要介绍其工作原理。
驱动安装
0、前期准备
需要提前说明的是,要完成毫米波雷达建图实验,我们至少需要两台能够运行Ubuntu的设备,并且至少有一台需要是移动设备。本次实验采用NVIDIA公司的JTX1开发板作为Ubuntu的移动设备,安装在TurtleBot2上,用于接受雷达信息并控制机器人。另外一台Ubuntu设备是RE0当中配置的服务器。
而现在要安装的驱动虽然不是必须的,但最好是在两台设备上都进行安装,因为我们经常需要调试雷达的参数并查看雷达的成像效果。在两台设备上都安装的话比较便于调试。
1、下载源码
有关的源码下载自TI Resource Explorer网站(http://dev.ti.com/tirex/#/)。
进入之后在左侧文件浏览器当中选择:mmWave Sensor->Industrial Toolbox
在右侧的内容浏览器的顶部最右侧有下载按钮,点击即可下载所有关于TI mmWave雷达的源码。
2、准备雷达
TI IWR1443EVM是一块板载雷达和DSP的开发板,其本身內建一个开箱的程序。但是如果我们曾使用其做过其他的实验(在其DSP当中烧录了其他程序),或者更改过其运行参数,就没办法直接使用TI提供的驱动代码。方便起见我们需要重新向DSP上烧录官方提供的OUT-OF-BOX程序。
但是我们其实是可以更改雷达的驱动代码,使其适应不同的DSP程序,或者是发射波形配置的
注意在烧录程序的时候需要将SOP2跳键帽扣上:

而加载配置和使用的时候要将跳键帽拔出。
烧录完成之后拔开跳键帽。
3、编译源码
1、在合适的地方新建一个文件夹“
mkdir _ws
2、在工作空间下新建一个src文件夹作为源码目录。这个src文件夹的文件名必须是src,这是ROS编译器catkin_make所要求的。
cd _ws
mkdir src
3、在src文件夹下将压缩包当中的ti_mmwave_rospkg文件夹解压出来。
4、需要编译源码我们还差一个组件,这个组件不是ROS的基础组件,无法使用rosdep获取,所以我们需要从源码编译。在src目录下git,或者直接在github上面下载解压均可。
git clone https://github.com/wjwwood/serial.git
我常常因为网络不好git不下来,建议直接去github下载
git完毕后我们不需要去调整他,serial跟ti_mmwave_rospkg平行放置即可。
5、编译
回到工作空间目录下
catkin_make

到这里就编译完成,接下来测试一下源码。
4、测试驱动
测试驱动之前先要给用于接收雷达数据的和发送配置文件的两个USB串口获取权限。在没有更改串口名称的情况下,TI的毫米波雷达使用的都是ttyACM1和ttyACM0,但是有很多其他的设备有时也会起这个名字,要注意。如果有重名的话需要改一下。
每次测试驱动前,或是重新插拔都需要:
sudo chmod a+rw /dev/ttyACM0
sudo chmod a+rw /dev/ttyACM1
否则会出现错误:
DataUARTHandler Read Thread: Failed to open Data serial port with error: IO Exception (13): Permission denied, file /home/mug/WORK/RDrive_ws/src/serial/src/impl/unix.cc, line 151.
且rviz界面没有显示。
在获得串口权限和source之后,运行:
roslaunch ti_mmwave_rospkg rviz_1443_3d.launch
可以看到雷达点云。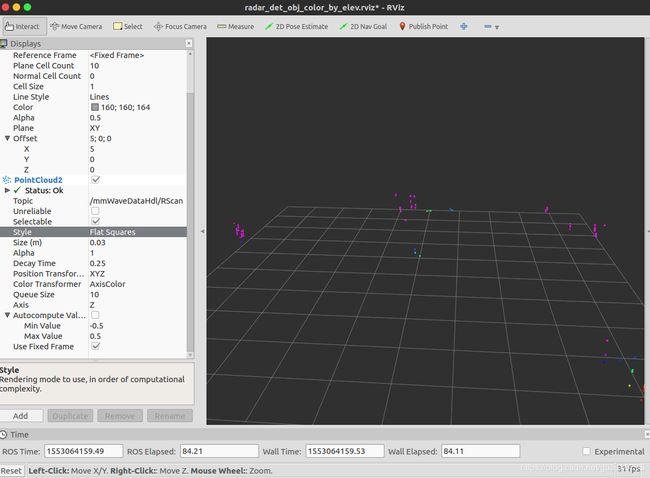
驱动解析
一、文件结构
TI提供的最主要驱动代码文件夹是“ti_mmwave_rospkg”当然要顺利运行还需要另一个文件夹“serial”但是因为我们不需要改动后者,所以解析的内容旨在分析“ti_mmwave_rospkg”源码文件夹。
在“ti_mmwave_rospkg”源码文件夹下共有6个文件夹,其作对应的做用如下
- cfg :存放默认雷达配置文件,每个启动项的配置文件与应用同名。
- docs :存放雷达驱动的数据手册和使用说明。
- include :存放头文件,定义了数据格式等。
- launch :存放启动项文件。
- src :存放include文件夹对应的源文件。
- srv : 存放服务格式文件.srv。
其中cfg文件如何去解析,launch启动项文件如何去编写等内容不在TI驱动的主要考虑范围,下文主要解析src、include和src文件夹。
二、服务
服务用于将配置文件载入雷达flash当中,需要启动的节点除了mmWaveQuickConfiguickConfig外还需要mmWaveCommSrv用于接收配置文件。启动launch文件的时候会自动启动mmWaveCommSrv。
服务传递的信息格式也很简单,发收分别通过string型的字符串comm和resp完成。对应的头文件和源文件实现也比较常规。唯一值得注意的地方是在编程时头文件内需要包含服务格式“mmWaveCLI”对应的头文件,这个文件是在编译过程当中自动生成的,因此需要在CMakeLists中写好。
三、节点
先介绍一下PC处理数据的流程,该过程分为三步:
- 利用“serial”库从串口获取数据。
- 利用PC内的两块缓存区,缓存1获取数据A时(主要是找到魔数,并把它去掉),缓存2对之前获取到的数据B进行重新排序。这个过程是同时发生的。
- 当A完成解包,B完成排序后,缓存1把A给缓存2处理,自己再读入新的数据。(乒乓缓存)
四、数据解包
读取数据的过程很简单,检测一个长度为8字节的固定开头即可(magic word)。我们比较关心的是每一帧数据是如何被ROS理解的。这里每种型号的EVM发送的数据格式都是类似的,只有一些小细节不太一样。比如,1443的包头字长是40字,而其他型号有44个字,这是因为14系列缺少一个关于子帧数的信息。但是这些细节不影响我们分析,因此我们在这里将其忽略。详细的解包要求见下表:
| index | context |
|---|---|
| 0x00~0x04 | version |
| 0x05~0x08 | total packet length |
| 0x09~0x12 | EVM platform |
| 0x13~0x16 | frame number |
| 0x17~0x20 | cpu cycles time |
| 0x21~0x24 | objects number |
| 0x21~0x24 | TLVs number |
| 0x25~0x28 | sub frame number |
该表是数据包包头的内容解析,较为的简单,如果一个数据包的包头解析正确,且total packet length正确,就可以对该包的剩余部分,即检测数据部分进行解析。这里还需要额外提到的还有一点,关于TLV(Tag Length Value)。TLV是一种节点间的通信协议,通信前需要确定协议的形式和长度,这些在TLVs number中已经包含了。
检测数据会被存入RScan当中,并作为一个消息在之后发布。(随后要用到多个雷达协同工作时话题名称需要重新更改、编译)RScan可以看作一个一维向量,长度是探测到的物体个数。
DataUARTHandler_pub = nodeHandle->advertise< sensor_msgs::PointCloud2 >("RScan", 100);
对RScan进行内存分配后,计算所有目标点可能出现的空间范围,其中用到的最大俯仰角和方向角是一般被设为90度。
maxAllowedElevationAngleDeg = 90; // Use max angle if none specified
maxAllowedAzimuthAngleDeg = 90; // Use max angle if none specified
RScan是pointcloud2型的消息,因此需要将对应的雷达数据转化为点云。转化的方式根据EVM当中烧录的SDK文件不同而有所变化。在3.x之后的版本当中获取检测数据和转换为点云的方式更为简单,因此我们以3.x之后的版本为例来进行解析。
首先先声明存储雷达数据的类实体:
mmwData.numObjOut = mmwData.header.numDetectedObj;
之后对雷达数据当中的每个目标点做处理,分别拷贝每个检测目标的坐标(xyz单位m)以及速度信息(单位m/s),像这样:
memcpy( &mmwData.newObjOut.x, ¤tBufp->at(currentDatap), sizeof(mmwData.newObjOut.x));//获取x坐标信息
currentDatap += ( sizeof(mmwData.newObjOut.x) );//移动数据指针到y坐标信息首位
接下来需要把这些坐标信息转化为ROS能够接受的RScan格式,这其中涉及到一个坐标轴的转化问题。ROS默认的x轴平行于EVM数据默认的y轴;其y轴平行于EMV的x轴、且指向相反;两者z轴重叠。
RScan->points[i].x = mmwData.newObjOut.y; // ROS standard coordinate system X-axis is forward which is the mmWave sensor Y-axis
RScan->points[i].y = -mmwData.newObjOut.x; // ROS standard coordinate system Y-axis is left which is the mmWave sensor -(X-axis)
RScan->points[i].z = mmwData.newObjOut.z; // ROS standard coordinate system Z-axis is up which is the same as mmWave sensor Z-axis
3.x以后的版本当中将幅度值存在了整个检测目标数据之后读取,方式类似坐标,获取后直接传回RScan即可。但是诸如检测目标的速度信息,以及噪声等信息,虽然驱动当中写了相关的代码可以在指针指向该数据时做一些处理,但最终都没有赋值给RScan,也就是没有传入到ROS系统当中,因此不再赘述。