神经网络基本原理
1. 人工神经元( Artificial Neuron )模型
人工神经元是神经网络的基本元素,其原理可以用下图表示:

图1. 人工神经元模型
图中x1~xn是从其他神经元传来的输入信号,wij表示表示从神经元j到神经元i的连接权值,θ表示一个阈值 ( threshold ),或称为偏置( bias )。则神经元i的输出与输入的关系表示为:
图中 yi 表示神经元i的输出,函数f称为激活函数 ( Activation Function )或转移函数 ( Transfer Function ) ,net称为净激活(net activation)。若将阈值看成是神经元i的一个输入x0的权重wi0,则上面的式子可以简化为:
若用X表示输入向量,用W表示权重向量,即:
X = [ x0 , x1 , x2 , ……. , xn ]
则神经元的输出可以表示为向量相乘的形式:
若神经元的净激活net为正,称该神经元处于激活状态或兴奋状态(fire),若净激活net为负,则称神经元处于抑制状态。
图1中的这种“阈值加权和”的神经元模型称为M-P模型 ( McCulloch-Pitts Model ),也称为神经网络的一个处理单元( PE, Processing Element )。
1. 常用激活函数
激活函数的选择是构建神经网络过程中的重要环节,下面简要介绍常用的激活函数。
(1) 线性函数 ( Liner Function )
(3) 阈值函数 ( Threshold Function)
以上3个激活函数都属于线性函数,下面介绍两个常用的非线性激活函数。
(4) S形函数 ( Sigmoid Function )
(5) 双极S形函数
S形函数与双极S形函数的图像如下:

图2. S形函数与双极S形函数图像
双极S形函数与S形函数主要区别在于函数的值域,双极S形函数值域是(-1,1),而S形函数值域是(0,1)。
由于S形函数与双极S形函数都是可导的(导函数是连续函数),因此适合用在BP神经网络中。(BP算法要求激活函数可导)
神经网络模型
神经网络是由大量的神经元互联而构成的网络。根据网络中神经元的互联方式,常见网络结构主要可以分为下面3类:
2.神经网络模型
(1)前馈神经网络 ( Feedforward Neural Networks )
前馈网络也称前向网络。这种网络只在训练过程会有反馈信号,而在分类过程中数据只能向前传送,直到到达输出层,层间没有向后的反馈信号,因此被称为前馈网络。感知机( perceptron)与BP神经网络就属于前馈网络。
图3 中是一个3层的前馈神经网络,其中第一层是输入单元,第二层称为隐含层,第三层称为输出层(输入单元不是神经元,因此图中有2层神经元)。

图3. 前馈神经网络
对于一个3层的前馈神经网络N,若用X表示网络的输入向量,W1~W3表示网络各层的连接权向量,F1~F3表示神经网络3层的激活函数。
那么神经网络的第一层神经元的输出为:
O1 = F1( XW1 )
第二层的输出为:
O2 = F2 ( F1( XW1 ) W2 )
输出层的输出为:
O3 = F3( F2 ( F1( XW1 ) W2 ) W3 )
若激活函数F1~F3都选用线性函数,那么神经网络的输出O3将是输入X的线性函数。因此,若要做高次函数的逼近就应该选用适当的非线性函数作为激活函数。
(2) 反馈神经网络 ( Feedback Neural Networks )
反馈型神经网络是一种从输出到输入具有反馈连接的神经网络,其结构比前馈网络要复杂得多。典型的反馈型神经网络有:Elman网络和Hopfield网络。
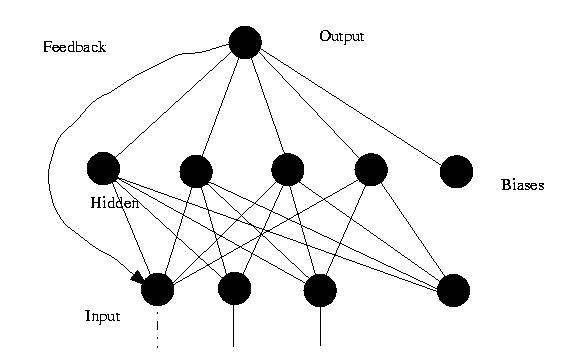
图4. 反馈神经网络
(3) 自组织网络 ( SOM ,Self-Organizing Neural Networks )
自组织神经网络是一种无监督学习网络。它通过自动寻找样本中的内在规律和本质属性,自组织、自适应地改变网络参数与结构。
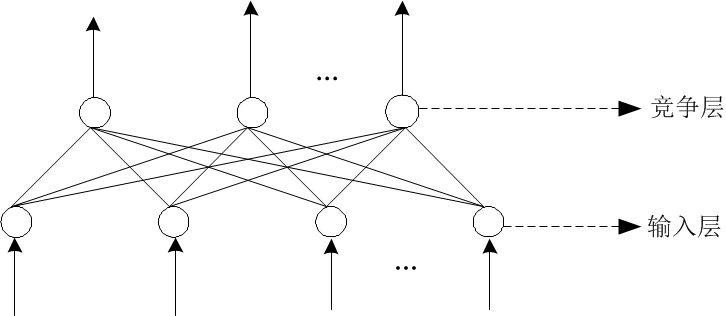
图5. 自组织网络
3. 神经网络工作方式
神经网络运作过程分为学习和工作两种状态。
(1)神经网络的学习状态
网络的学习主要是指使用学习算法来调整神经元间的联接权,使得网络输出更符合实际。学习算法分为监督学习( Supervised Learning )与无监督学习( Unsupervised Learning )两类。
监督学习算法将一组训练集 ( training set )送入网络,根据网络的实际输出与期望输出间的差别来调整连接权。监督学习算法的主要步骤包括:
1) 从样本集合中取一个样本(Ai,Bi);
2) 计算网络的实际输出O;
3) 求D=Bi-O;
4) 根据D调整权矩阵W;
5) 对每个样本重复上述过程,直到对整个样本集来说,误差不超过规定范围。
BP算法就是一种出色的监督学习算法。
无监督学习抽取样本集合中蕴含的统计特性,并以神经元之间的联接权的形式存于网络中。
Hebb学习律是一种经典的无监督学习算法。
(2) 神经网络的工作状态
神经元间的连接权不变,神经网络作为分类器、预测器等使用。
下面简要介绍一下Hebb学习率与Delta学习规则 。
(3) 无监督学习算法:Hebb学习率
Hebb算法核心思想是,当两个神经元同时处于激发状态时两者间的连接权会被加强,否则被减弱。
受该实验的启发,Hebb的理论认为在同一时间被激发的神经元间的联系会被强化。比如,铃声响时一个神经元被激发,在同一时间食物的出现会激发附近的另一个神经元,那么这两个神经元间的联系就会强化,从而记住这两个事物之间存在着联系。相反,如果两个神经元总是不能同步激发,那么它们间的联系将会越来越弱。
Hebb学习律可表示为:
![]()
其中wij表示神经元j到神经元i的连接权,yi与yj为两个神经元的输出,a是表示学习速度的常数。若yi与yj同时被激活,即yi与yj同时为正,那么Wij将增大。若yi被激活,而yj处于抑制状态,即yi为正yj为负,那么Wij将变小。
(4)监督学习算法:Delta学习规则
Delta学习规则是一种简单的监督学习算法,该算法根据神经元的实际输出与期望输出差别来调整连接权,其数学表示如下:
其中Wij表示神经元j到神经元i的连接权,di是神经元i的期望输出,yi是神经元i的实际输出,xj表示神经元j状态,若神经元j处于激活态则xj为1,若处于抑制状态则xj为0或-1(根据激活函数而定)。a是表示学习速度的常数。假设xi为1,若di比yi大,那么Wij将增大,若di比yi小,那么Wij将变小。
Delta规则简单讲来就是:若神经元实际输出比期望输出大,则减小所有输入为正的连接的权重,增大所有输入为负的连接的权重。反之,若神经元实际输出比期望输出小,则增大所有输入为正的连接的权重,减小所有输入为负的连接的权重。这个增大或减小的幅度就根据上面的式子来计算。
(5)监督学习算法:BP算法
采用BP学习算法的前馈型神经网络通常被称为BP网络。

图6. 三层BP神经网络结构
BP网络具有很强的非线性映射能力,一个3层BP神经网络能够实现对任意非线性函数进行逼近(根据Kolrnogorov定理)。一个典型的3层BP神经网络模型如图6所示。