GAN的基本原理
GAN 简介
GAN的工作原理
generator 和 discriminator相互博弈:
- discrimiator最大化真实样例与generator样例之间的差异
- generator根据discriminator“反馈的指导信息”,更新参数,生成“更靠谱”的样例,减小与真实样例的差异。
Minimax Game:
在origin GAN中:
一般而言,G是neural network, 它从一个先验分布 Pz P z ,生成x,上式写成:
GAN的应用示例
目前,Tensorflow 1.4已经提供了一些gan的实现,在tf.contrib.gan中;另外,有很多开源的GAN的实现。(示例略,可以参加mnist上的各种实验和DCGAN、WGAN等生成的图片)
GAN与ML
LR判别模型
样本实例集合: D={(xi,yi)}ni=1 D = { ( x i , y i ) } i = 1 n
利用最大似然(ML), 求解判别模型: hθ(x)=11+e−θTx h θ ( x ) = 1 1 + e − θ T x
事实上,当假设空间 hθ(x) h θ ( x ) 有足够强的表征能力,(比如真实分布确实由LR模型生成,或者 hθ h θ 是深层神经网络,可以表征任意函数);通过求导,可以得到最优解为:
(额,貌似推理了一句废话,不过这个公式正说明,当我们采用ML或者cross entropy的时候,最优解正是后验概率(条件概率),前提是 hθ(x) h θ ( x ) 有足够强的表征能力。推导这个式子,也可以和后面推导 D∗ D ∗ 相互验证)
观察式子:
- xi x i 是正例, hθ(xi) h θ ( x i ) 尽可能大,接近1
- xj x j 是负例, hθ(xj) h θ ( x j ) 尽可能小,接近0
- 或者添加负号,可以从极小化negative log loss的角度考虑。
对于GAN而言,某种程度上,D是h:
- xi∼Pdata x i ∼ P d a t a , 是“正例”,判别器D应使得 D(xi) D ( x i ) 尽可能大,接近1,即极大化 log(D(xi)) l o g ( D ( x i ) )
- xj∼PG x j ∼ P G , 是“负例”,判别器D应使得 D(xj) D ( x j ) 尽可能小,接近0, 即极大化 log(1−D(xj)) l o g ( 1 − D ( x j ) )
- 类似地,忽略先验概率,V函数定义为
V=Ex∼Pdata[logD(x)]+Ex∼PG[log(1−D(x))]=Ex∼Pdata[logD(x)]+Ez∼Pz[log(1−D(G(z)))] V = E x ∼ P d a t a [ l o g D ( x ) ] + E x ∼ P G [ l o g ( 1 − D ( x ) ) ] = E x ∼ P d a t a [ l o g D ( x ) ] + E z ∼ P z [ l o g ( 1 − D ( G ( z ) ) ) ], 而 D∗=maxDV(G,D) D ∗ = m a x D V ( G , D ) ; (这里忽略 P(y) P ( y ) ,两类先验概率相等,正对应后面训练D时,进行相等数量的sample)
事实上,训练判别器D的过程,正是使用ML求解二分类问题:
- sample x1,x2⋯xn x 1 , x 2 ⋯ x n from Pdata(x) P d a t a ( x ) , 作为正例
- sample x1~,x2~⋯xn~ x 1 ~ , x 2 ~ ⋯ x n ~ from PG(x) P G ( x ) (实际是sample z), 作为负例
- 利用最大似然求解 V=1n∑ni=1log D(xi)+1n∑ni=1log(1−D(x̃ i)) V = 1 n ∑ i = 1 n l o g D ( x i ) + 1 n ∑ i = 1 n l o g ( 1 − D ( x ~ i ) )
(同样的思想,有“NCE”, “negative sampling”)
ori-GAN和ML分别衡量不同的divergency
- ML 衡量生成模型与真实概率分布的KL距离
- ori-GAN衡量JS距离
ML and KL divergency
未知的真实分布: Pdata(x) P d a t a ( x )
样本实例集: D={xi}ni=1 D = { x i } i = 1 n , 采样自 Pdata(x) P d a t a ( x )
假设空间中的生成模型: PG(x;θ) P G ( x ; θ ) 来模拟 Pdata(x) P d a t a ( x )
根据ML原则:
所以,对生成模型采用ML原则,实际最小化KL距离。
origin-GAN and JS Divergency
- 给定G, 求解 D∗=maxDV(G,D) D ∗ = m a x D V ( G , D ) ;此时 V(G,D∗) V ( G , D ∗ ) 衡量 Pdata,PG P d a t a , P G 之间JS divergency
类比前面的LR的最优解 h∗θ(x) h θ ∗ ( x ) , D∗ D ∗ 表示在先验概率相等的前提下,后验概率 P(x来自于真实data|x) P ( x 来 自 于 真 实 d a t a | x )
此时,
- 求解G使得 G∗=minGV(G,D∗) G ∗ = m i n G V ( G , D ∗ )
GAN的训练过程
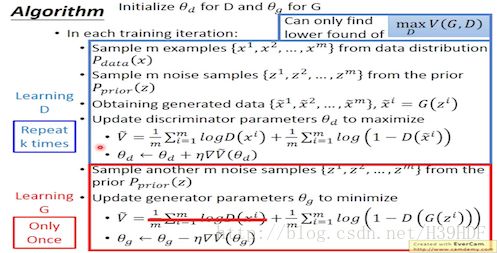
(GAN的完整训练过程。图片来自于“李宏毅 深度学习”课程)
(Ian Goodfellow, 在原始论文中改训练G为 −log(D(G(z))) − l o g ( D ( G ( z ) ) ) , 这个训练目标是从收敛的角度来考虑的)
GAN的特别之处在哪里?
- ML的训练会可能很麻烦:采用显式的概率分布(模型空间可能不够准确);采用隐式的概率推断会涉及比较复杂的方法
- GAN提供了另外一种方案,它直接利用BP来优化概率分布距离的方法:求解generator和discriminator的minimax博弈。generator和discriminator都采用neural network,有足够强大的表征能力(给一个表征能力的实验)。
- GAN提供了一个框架,可以将ML纳入进来,甚至可以按需设计其它的函数V(参见fGAN)
那么能否在GAN的框架下,将ML与原始GAN统一起来?能否使用其它的概率距离度量?
fGAN: GAN的统一框架
f-divergency
定义:
例子:
- f=xlogx,Df(P||Q)=KL(P||Q) f = x l o g x , D f ( P | | Q ) = K L ( P | | Q )
- f=−logx,Df(P||Q)=revserse KL(P||Q) f = − l o g x , D f ( P | | Q ) = r e v s e r s e K L ( P | | Q )
f=ulogu−(u+1)log(u+1),Df(P||Q)=2JS(P||Q)−2log2 f = u l o g u − ( u + 1 ) l o g ( u + 1 ) , D f ( P | | Q ) = 2 J S ( P | | Q ) − 2 l o g 2
f=ulogu-(u+1)log(u+1), D_f(P||Q) =2JS(P||Q) - 2log2$
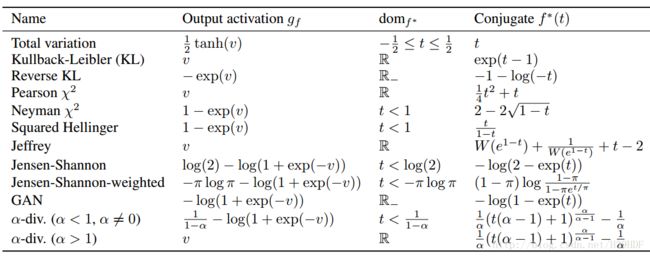
Fenchel Conjugate:
(注: f∗(t) f ∗ ( t ) 也是convex, 它是一系列仿射函数的max)
事实上,Fenchel Conjugate定义了“斜率(梯度)到截距”的一种映射
当固定 t t , f∗(t)=maxx∈Dom(f){xt−f(x)} f ∗ ( t ) = max x ∈ D o m ( f ) { x t − f ( x ) } , 通过对x求导得到:
上式可以看做参数方程的形式定义了 f∗ f ∗ ,它的几何意义:对任意的x,作f(x)的切线,斜率为t, 与y的截距的负数为 f∗(t) f ∗ ( t ) ; 它定义了斜率和负截距的映射关系。
重要的是,上述映射关系的对偶性质!
与GAN的联系
这里,令D(x) = t, 上式的下界可以写作:
(事实上,如果D(x)表征能力足够强,最优解为 D∗(x)=f′(p(x)q(x)) D ∗ ( x ) = f ′ ( p ( x ) q ( x ) ) ,但是这个无法直接求解 )
对于GAN而言:
写成minimax形式:
按需挑选不同的f-divergency:
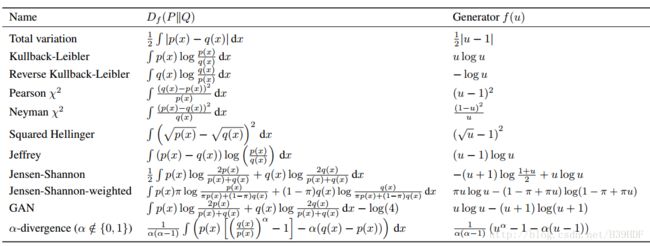
(不同的f-divergency对应的GAN, 图片来自于论文 f-GAN)
WGAN:解决收敛性问题
origin-GAN面临的收敛问题
理想情况:D 指导 PG P G 往真实分布 Pdata P d a t a (dashed)运动
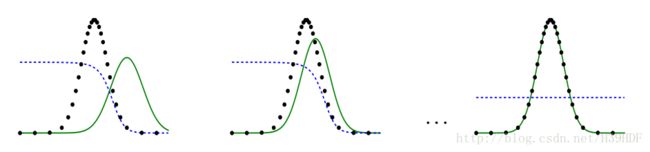
实际情况:D训练越好,完美区分,梯度消失,无指导能力

考虑”parallel lines distribution”, 二维分布 Pdata:(0,Z),其中Z∼U[0,1] P d a t a : ( 0 , Z ) , 其 中 Z ∼ U [ 0 , 1 ] , PG:(θ,Z) P G : ( θ , Z ) :
- JS(Pdata,PG)=|θ| J S ( P d a t a , P G ) = | θ |
- KL(Pdata||PG)=KL(PG||Pdata)=+∞(θ≠0),0(θ=0) K L ( P d a t a | | P G ) = K L ( P G | | P d a t a ) = + ∞ ( θ ≠ 0 ) , 0 ( θ = 0 )
- Discriminator D往往能将 Pdata,PG P d a t a , P G 完美分开
- 如上图所示,在D看来, d0,d50 d 0 , d 50 的JSD都是log2; D没有动力,让 PG P G 往“期望的方向”移动,会导致收敛问题
- 事实上,像生物进化一样,进化(比如眼睛)往往不是一蹴而就的;应该有更合适的度量方式,使得 PG P G 向 Pdata P d a t a “靠拢”(虽然此时JSD看来,generator并没有改善)
Earth Mover’s Distance
定义:对于概率分布P,Q,average distance of a plan γ γ :
Earth Mover’s Distance:
示意图如下:
本质上, γ γ 就是一个联合概率,它的边缘分布分别为 P,Q P , Q

( Moving Plan, 图片来自于“李宏毅 深度学习”)
在上面的 parallel line distribution例子里,
- W(Pdata,PG)=|θ| W ( P d a t a , P G ) = | θ |
WGAN
论文中证明,当我们采用Earth Mover’s Distance来度量 Pdata,PG P d a t a , P G 距离,相应的GAN形式如下(Kantorovich-Rubinstein duality, 来自论文“Optimal Transport: Old and New”):
其中, 1-lipschitz 是指:
该条件的限制,防止了D(x)的变化过于剧烈。这里,整个优化目标有点“返璞归真”的意思了。
WGAN的论文中,使用weight-clipping近似1-lipschitz 条件:
- 权重 |w|>c⇒|w|=c | w | > c ⇒ | w | = c
- 实际使用的是k-lipschitz
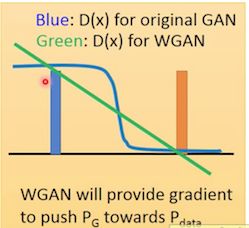
- 可以看到origin GAN 会存在梯度消失,无法有效指导 PG P G 的方向
- WGAN可以提供有效信息。
- W(Pdata,PG) W ( P d a t a , P G ) 的值可以作为训练好坏的参考
improved WGAN
将WGAN的1-lipschitz条件以惩罚项的形式引入:
Ppenalty P p e n a l t y 的生成:对于 x∼Pdata,x̃ ∼PG x ∼ P d a t a , x ~ ∼ P G , 计算 x,x̃ x , x ~ 之间的随机点,作为 x′∼Ppenalty x ′ ∼ P p e n a l t y
GAN的家族
| Modify the optimization of GAN | Different structure from the original GAN |
|---|---|
| fGAN | Conditional GAN |
| WGAN | Semi-GAN |
| Least-square GAN | InfoGAN |
| Loss Sensitive GAN | BiGAN |
| Energy-based GAN | Cycle GAN |
| Boundary-Seeking GAN | IRGAN |
| Unroll GAN | VAE GAN |
| … | … |