视觉检测——双目相机的标定(简单原理+Opencv实现)
深度相机原理揭秘--双目立体视觉
双目相机空间坐标计算:(good)
https://www.cnblogs.com/zyly/p/9373991.html
深度相机原理:
https://blog.csdn.net/electech6/article/details/78526800
上文的博客总结双目相机和单目相机的区别和原理很好,值得学习。
在这里我总结一下主要是以下几点:
深度相机主要有一下几种:
- 基于TOF(time of flight)飞行时间测距法--发射反射接收
- 基于结构光:结构光成像的硬件:1.相机、2.投射器。 原理:1.投射到被测物体表面 2.由单个或多个相机拍摄表面即得的结构光 3.基于三角测量原理,经图像三维解析计算--》三维重建 常见的仪器:kinect
- 基于双目的立体视觉
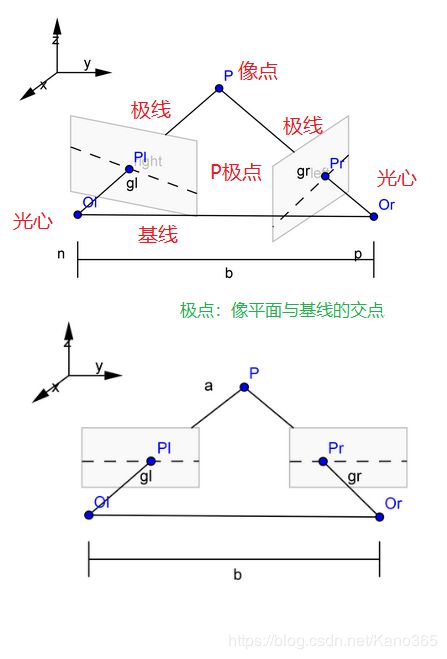
我们主要总结下双目立体视觉:
在单目的视野A情况下,点的远近是看不出的,加上视野B我们就可以看出

而通过相机A、B我们就可以判断三点的远近
在Opencv中我们可以很好的实现双目相机的标定等一系列操作:
- 分别校正左相机和右相机,得到他们的内参和畸变系数
- 找到左右标定图的内角点坐标,加上三维的世界坐标,加上上面的左右相机内参矩阵和畸变系数,求出双目的标定参数矩阵R、T、E、F(旋转矩阵、平移矩阵、本征矩阵、基础矩阵)
- 根据上面的标定结果,对图像进行矫正--------极线约束,矫正后两图像位于同一平面且互相平行
- 对矫正后的两张图像进行像素匹配(有很多算法),获得视差图,计算每个图像的深度,获得深度图
左右棋盘图如下:
https://pan.baidu.com/s/1-U_1v6idEKKvTS1Z6_kXig 提取码:0k3u
在Opencv中的代码如下,有详细的注释:
main.cpp
#include"11.h"
int main()
{
calibrator calib(LEFT_FOLDER, RIGHT_FOLDER, 1.f, 5, 4);
calib.calc_image_points(true); //找到左右标定图的角点坐标
bool done = calib.calibrate(); //双目标定计算,并保存stereo_calib.xml,得到 R, T, E, F
// R– 输出第一和第二相机坐标系之间的旋转矩阵。
// T– 输出第一和第二相机坐标系之间的旋转矩阵平移向量。
// E–输出本征矩阵。
// F–输出基础矩阵。
if (!done)
{
cout << "立体标定失败......." << endl;
}
else
{
cout << "立体标定成功......." << endl;
}
Size image_size(320, 240);
rectifier rec(filename11, image_size);//标定过的摄像机进行校正,stereoRectify(),得到 Rl, Rr, Pl, Pr, Q
//R1– 输出第一个相机的3x3矫正变换(旋转矩阵) .
//R2– 输出第二个相机的3x3矫正变换(旋转矩阵) .
//P1–在第一台相机的新的坐标系统(矫正过的)输出 3x4 的投影矩阵
//P2–在第二台相机的新的坐标系统(矫正过的)输出 3x4 的投影矩阵
//Q–输出深度视差映射矩阵
rec.show_rectified(image_size);
disparity disp(filename11, image_size); //SGBM求视差图,进而求解深度图
disp.show_disparity(image_size);
system("pause");
return 0;
}
11.h
#pragma once
// Program illustrate stereo camera calibration
// Author: Samarth Manoj Brahmbhatt, University of Pennsylvania
#include
#include
#include
#define LEFT_FOLDER "./left/"
#define RIGHT_FOLDER "./right/"
#define DATA_FOLDER "./cam_calib/"
#define filename11 "./cam_calib/stereo_calib.xml"
using namespace cv;
using namespace std;
class calibrator
{
public:
calibrator(string, string, float, int, int); //初始化构造函数
Size get_image_size(); //获取单张图片的大小
void calc_image_points(bool); //通过检测棋盘格角点计算图像点
//得到 l_image_points, r_image_points
bool calibrate(); //双目标定计算
private:
string l_path, r_path;
Mat l_cameraMatrix, l_distCoeffs;
Mat r_cameraMatrix, r_distCoeffs;
vector l_images, r_images;
bool show_chess_corners;
float side_length; //棋盘格的边长
int width, height; //棋盘格的内角点数量
vector > l_image_points, r_image_points;
vector > object_points;
Mat R, T, E, F; //立体相机参数
};
//////////////////////////////////////////////////////////////////////////////
class rectifier //立体摄像机校正
{
public:
rectifier(string, Size); //constructor
void show_rectified(Size); //function to show live rectified feed from stereo camera
private:
Mat map_l1, map_l2, map_r1, map_r2; //pixel maps for rectification
string path;
};
//////////////////////////////////////////////////////////////////////////////
class disparity
{
public:
disparity(string, Size); //constructor
void show_disparity(Size); // show live disparity by processing stereo camera feed
private:
Mat map_l1, map_l2, map_r1, map_r2, Q; // rectification pixel maps
int mindisparity = 0;
int ndisparities = 64;
int SADWindowSize = 11;
cv::Ptr sgbm = cv::StereoSGBM::create(mindisparity, ndisparities, SADWindowSize);
// 用于视差计算的立体匹配对象
Mat framel = imread("L.jpg");
Mat framer = imread("R.jpg");
}; 11.cpp
#include"11.h"
calibrator::calibrator(string _l_path, string _r_path, float _side_length, int _width, int _height)
{
side_length = _side_length;
width = _width;
height = _height;
l_path = _l_path;
r_path = _r_path;
cout << "左相机的棋盘图位置在:" << _l_path << endl;
cout << "右相机的棋盘图位置在:" << _r_path << endl;
// Read images
std::vector image_file_L;
std::vector image_file_R;
glob(l_path, image_file_L); //将目录下的文件读取到容器中
glob(r_path, image_file_R);
for (int i = 0; i < image_file_L.size(); i++)
{
l_images.push_back(imread(image_file_L[i]));
}
for (int ii = 0; ii < image_file_R.size(); ii++)
{
r_images.push_back(imread(image_file_R[ii]));
}
}
void calibrator::calc_image_points(bool show)
{
//计算物体坐标系中的物体点(左上角原点)
//三维点根据棋盘格边长大小、内角点数量初始化
vector ob_p;
for (int i = 0; i < height; i++)
{
for (int j = 0; j < width; j++)
{
ob_p.push_back(Point3f(j * side_length, i * side_length, 0.f));
}
}
if (show)
{
namedWindow("Left Chessboard corners");
namedWindow("Right Chessboard corners");
}
for (int i = 0; i < l_images.size(); i++)
{
Mat lim = l_images[i];
Mat rim = r_images[i];
vector l_im_p;
vector r_im_p; //20个内角点坐标
bool l_pattern_found = findChessboardCorners(lim, Size(width, height), l_im_p, CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE + CALIB_CB_FAST_CHECK);
bool r_pattern_found = findChessboardCorners(rim, Size(width, height), r_im_p, CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE + CALIB_CB_FAST_CHECK);
if (l_pattern_found && r_pattern_found)
{
object_points.push_back(ob_p);
Mat gray;
cvtColor(lim, gray, CV_BGR2GRAY);
cornerSubPix(gray, l_im_p, Size(5, 5), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
cvtColor(rim, gray, CV_BGR2GRAY);
cornerSubPix(gray, r_im_p, Size(5, 5), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
l_image_points.push_back(l_im_p); // 存放20个内角点的容器的容器 31(imgs)*20(points)
r_image_points.push_back(r_im_p);
if (show)
{
Mat im_show = lim.clone();
drawChessboardCorners(im_show, Size(width, height), l_im_p, true);
imshow("Left Chessboard corners", im_show);
im_show = rim.clone();
drawChessboardCorners(im_show, Size(width, height), r_im_p, true);
imshow("Right Chessboard corners", im_show);
while (char(waitKey(1)) != '\r')
{
}
}
}
else
{
l_images.erase(l_images.begin() + i);
r_images.erase(r_images.begin() + i);
}
}
}
bool calibrator::calibrate()
{
string filename = DATA_FOLDER + string("left_cam_calib.xml"); //读取左右相机的标定参数
FileStorage fs(filename, FileStorage::READ);
fs["cameraMatrix"] >> l_cameraMatrix;
fs["distCoeffs"] >> l_distCoeffs;
fs.release();
filename = DATA_FOLDER + string("right_cam_calib.xml");
fs.open(filename, FileStorage::READ);
fs["cameraMatrix"] >> r_cameraMatrix;
fs["distCoeffs"] >> r_distCoeffs;
fs.release();
if (!l_cameraMatrix.empty() && !l_distCoeffs.empty() && !r_cameraMatrix.empty() && !r_distCoeffs.empty())
{
double rms = stereoCalibrate(object_points, l_image_points, r_image_points,
l_cameraMatrix, l_distCoeffs, r_cameraMatrix, r_distCoeffs, l_images[0].size(), R, T, E, F);
// R– 输出第一和第二相机坐标系之间的旋转矩阵。
// T– 输出第一和第二相机坐标系之间的旋转矩阵平移向量。
// E-包含了两个摄像头相对位置关系的本征矩阵Essential Matrix(3*3)
//其物理意义是左右图像坐标系相互转换的矩阵
// F-既包含两个摄像头相对位置关系、也包含摄像头各自内参信息的基础矩阵
cout << "校正后的立体相机的均方根误差为:" << rms << endl;
filename = DATA_FOLDER + string("stereo_calib.xml");
fs.open(filename, FileStorage::WRITE);
fs << "l_cameraMatrix" << l_cameraMatrix;
fs << "r_cameraMatrix" << r_cameraMatrix;
fs << "l_distCoeffs" << l_distCoeffs;
fs << "r_distCoeffs" << r_distCoeffs;
fs << "R" << R;
fs << "T" << T;
fs << "E" << E;
fs << "F" << F;
cout << "校准参数保存至:" << filename << endl;
return true;
}
else
{
return false;
}
}
Size calibrator::get_image_size()
{
return l_images[0].size();
}
///////////////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////////
rectifier::rectifier(string filename, Size image_size)
{
// Read individal camera calibration information from saved XML file
Mat l_cameraMatrix, l_distCoeffs, r_cameraMatrix, r_distCoeffs, R, T;
FileStorage fs(filename, FileStorage::READ);
fs["l_cameraMatrix"] >> l_cameraMatrix;
fs["l_distCoeffs"] >> l_distCoeffs;
fs["r_cameraMatrix"] >> r_cameraMatrix;
fs["r_distCoeffs"] >> r_distCoeffs;
fs["R"] >> R;
fs["T"] >> T;
fs.release();
if (l_cameraMatrix.empty() || r_cameraMatrix.empty() || l_distCoeffs.empty() || r_distCoeffs.empty()
|| R.empty() || T.empty())
{
cout << "Rectifier: Loading of files not successful" << endl;
}
// Calculate transforms for rectifying images
Mat Rl, Rr, Pl, Pr, Q;
stereoRectify(l_cameraMatrix, l_distCoeffs, r_cameraMatrix, r_distCoeffs,
image_size, R, T, Rl, Rr, Pl, Pr, Q);
//R1– 输出第一个相机的3x3矫正变换(旋转矩阵) .
//R2– 输出第二个相机的3x3矫正变换(旋转矩阵) .
//P1–在第一台相机的新的坐标系统(矫正过的)输出 3x4 的投影矩阵
//P2–在第二台相机的新的坐标系统(矫正过的)输出 3x4 的投影矩阵
//Q–输出深度视差映射矩阵
// Calculate pixel maps for efficient rectification of images via lookup tables
initUndistortRectifyMap(l_cameraMatrix, l_distCoeffs, Rl, Pl, image_size, CV_16SC2, map_l1, map_l2);
initUndistortRectifyMap(r_cameraMatrix, r_distCoeffs, Rr, Pr, image_size, CV_16SC2, map_r1, map_r2);
fs.open(filename, FileStorage::APPEND); //追加矫正数据,映射表
fs << "Rl" << Rl;
fs << "Rr" << Rr;
fs << "Pl" << Pl;
fs << "Pr" << Pr;
fs << "Q" << Q;
fs << "map_l1" << map_l1;
fs << "map_l2" << map_l2;
fs << "map_r1" << map_r1;
fs << "map_r2" << map_r2;
fs.release();
}
void rectifier::show_rectified(Size image_size) {
//VideoCapture capr(1), capl(2);
////reduce frame size
//capl.set(CV_CAP_PROP_FRAME_HEIGHT, image_size.height);
//capl.set(CV_CAP_PROP_FRAME_WIDTH, image_size.width);
//capr.set(CV_CAP_PROP_FRAME_HEIGHT, image_size.height);
//capr.set(CV_CAP_PROP_FRAME_WIDTH, image_size.width);
//destroyAllWindows();
//namedWindow("Combo");
//while (char(waitKey(1)) != 'q')
//{
// //grab raw frames first
// capl.grab();
// capr.grab();
// //decode later so the grabbed frames are less apart in time
// Mat framel, framel_rect, framer, framer_rect;
// capl.retrieve(framel);
// capr.retrieve(framer);
// if (framel.empty() || framer.empty())
// break;
// // Remap images by pixel maps to rectify
// remap(framel, framel_rect, map_l1, map_l2, INTER_LINEAR);
// remap(framer, framer_rect, map_r1, map_r2, INTER_LINEAR);
// // Make a larger image containing the left and right rectified images side-by-side
// Mat combo(image_size.height, 2 * image_size.width, CV_8UC3);
// framel_rect.copyTo(combo(Range::all(), Range(0, image_size.width)));
// framer_rect.copyTo(combo(Range::all(), Range(image_size.width, 2 * image_size.width)));
// // Draw horizontal red lines in the combo image to make comparison easier
// for (int y = 0; y < combo.rows; y += 20)
// line(combo, Point(0, y), Point(combo.cols, y), Scalar(0, 0, 255));
// imshow("Combo", combo);
//}
//capl.release();
//capr.release();
Mat framel, framel_rect, framer, framer_rect;
framel = imread("L.jpg");
framer = imread("R.jpg");
if (framel.empty() || framer.empty())
{
cout << "读取需要矫正的图像失败!!" << endl;
}
//Remap images by pixel maps to rectify
remap(framel, framel_rect, map_l1, map_l2, INTER_LINEAR);
remap(framer, framer_rect, map_r1, map_r2, INTER_LINEAR);
//Size imageSize(2048, 1536); //将两幅图像拼接在一起,size.width=2048,size.height=1536
//Mat showImage(1536, 2 * 2048, CV_8UC1);//rows * columns
//Rect rectLeft(0, 0, imageSize.width, imageSize.height);
//Rect rectRight(imageSize.width, 0, imageSize.width, imageSize.height);//创建两个矩阵
//tmpL_img.copyTo(showImage(rectLeft));//把左右矫正后的图片放入showimage对应的左右上
//tmpR_img.copyTo(showImage(rectRight));
Mat combo(image_size.height, 2 * image_size.width, CV_8UC3);
Rect rectLeft(0, 0, image_size.width, image_size.height);
Rect rectRight(image_size.width, 0, image_size.width, image_size.height);//创建两个矩阵
framel_rect.copyTo(combo(rectLeft));
framer_rect.copyTo(combo(rectRight));
// Draw horizontal red lines in the combo image to make comparison easier
for (int y = 0; y < combo.rows; y += 20)
{
line(combo, Point(0, y), Point(combo.cols, y), Scalar(0, 0, 255));
}
imshow("Combo", combo);
imwrite("Combo.jpg", combo);
}
///////////////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////////
disparity::disparity(string filename, Size image_size)
{
// 读取双目标定参数
FileStorage fs(filename, FileStorage::READ);
fs["map_l1"] >> map_l1;
fs["map_l2"] >> map_l2;
fs["map_r1"] >> map_r1;
fs["map_r2"] >> map_r2;
fs["Q"] >> Q;
if (map_l1.empty() || map_l2.empty() || map_r1.empty() || map_r2.empty())
{
cout << "WARNING: Loading of mapping matrices not successful" << endl;
}
cv::Ptr sgbm = cv::StereoSGBM::create(mindisparity, ndisparities, SADWindowSize);
int P1 = 8 * framel.channels() * SADWindowSize* SADWindowSize;
int P2 = 32 * framel.channels() * SADWindowSize* SADWindowSize;
sgbm->setP1(P1);
sgbm->setP2(P2);
sgbm->setPreFilterCap(15);
sgbm->setUniquenessRatio(10);
sgbm->setSpeckleRange(2);
sgbm->setSpeckleWindowSize(100);
sgbm->setDisp12MaxDiff(1);
//sgbm->setMode(cv::StereoSGBM::MODE_HH);
}
void disparity::show_disparity(Size image_size)
{
Mat disp, disp32F;
Mat framel_rect, framer_rect;
if (framel.empty() || framer.empty())
{
cout << "读取需要矫正的图像失败!!" << endl;
}
//SGBM
remap(framel, framel_rect, map_l1, map_l2, INTER_LINEAR);
remap(framer, framer_rect, map_r1, map_r2, INTER_LINEAR);
sgbm->compute(framel_rect, framer_rect, disp);
disp.convertTo(disp, CV_32F, 1.0 / 16);
Mat disp8U = Mat(disp.rows, disp.cols, CV_8UC1);
normalize(disp, disp8U, 0, 255, NORM_MINMAX, CV_8UC1);
disp.convertTo(disp32F, CV_32F, 1.f / 16.f);
imshow("SGBM视差图", disp8U);
imwrite("SGBM视差图.jpg", disp8U);
Mat pointcloud;
// 从视差图像中计算三维坐标
reprojectImageTo3D(disp8U, pointcloud, Q, true);
//绘制一个红色矩形,大约40像素宽的正方形面积im图像
int xmin = framel.cols / 2 - 20, xmax = framel.cols / 2 + 20, ymin = framel.rows / 2 - 20, ymax = framel.rows / 2 + 20;
rectangle(framel_rect, Point(xmin, ymin), Point(xmax, ymax), Scalar(0, 0, 255));
//提取深度为40px的矩形,并打印出它们的平均值
pointcloud = pointcloud(Range(ymin, ymax), Range(xmin, xmax));
Mat z_roi(pointcloud.size(), CV_32FC1);
int from_to[] = { 2, 0 };
mixChannels(&pointcloud, 1, &z_roi, 1, from_to, 1);
cout << "Depth: " << mean(z_roi) << " mm" << endl;
/*FindStereoCorrespondenceBM
imshow("Left", framel_rect);
imwrite("深度图.jpg", framel_rect);*/
} 最后效果:



双目标定我们得到:
图像去畸变 :
- stereoCalibrate()立体标定
- ----------------------------------------------------------------------
- R– 第一和第二相机坐标系之间的旋转矩阵。
- T– 输出第一和第二相机坐标系之间的平移向量。
- E–本征矩阵。
- F–基础矩阵。
- ----------------------------------------------------------------------
- 立体校正的目的就是,把实际中消除畸变后的非共面行对准的两幅图像,校正成共面行对准。
- stereoRectify()双目矫正 六个参数:cameraMatrix × 2 distCoeffs × 2 R T矩阵 六个参数
- ----------------------------------------------------------------------
- R1– 第一个相机的3x3矫正变换(旋转矩阵)
- R2– 第二个相机的3x3矫正变换(旋转矩阵)
- P1–在第一台相机的新的坐标系统(矫正过的)输出 3x4 的投影矩阵
- P2–在第二台相机的新的坐标系统(矫正过的)输出 3x4 的投影矩阵
- Q–深度视差映射矩阵
- ----------------------------------------------------------------------
initUndistortRectifyMap(l_cameraMatrix, l_distCoeffs, Rl, Pl, image_size, CV_16SC2, map_l1, map_l2);
initUndistortRectifyMap(r_cameraMatrix, r_distCoeffs, Rr, Pr, image_size, CV_16SC2, map_r1, map_r2);得到对应左相机右相机的矫正映射表map_L1、map_L2、map_R1、map_R2