- reveiw of test --welcome www.1maitao.com
从0到1的技术进阶
数据结构算法出版网络生活
--welcomewww.1maitao.comA数学的复习:1.最好能在7月前开始,如果你基础不是很好,又想在数学多拿分的话。2.课本很重要,08和09的题已经充分说明了基础的重要性,最好在5——6月把两册高数书及例题过两遍,有个宏观的把握,拿到题,就知道是在考什么。3.参考书的选择:个人觉得李永乐那本复习全书更注重基础,更贴近这2年的考研风格。全书中线性代数那100多页讲得超好。4.复习进度:
- 线性代数在图像处理中的应用 --- 纳尼? 2D的高斯核可以通过1D的高斯核直接生成?(秩为1的矩阵)
松下J27
LinearAlgebra线性代数图像处理人工智能
二维高斯核,Rank秩等于一的矩阵之前,我在学习图像处理的时候,会经常用到Gaussianblur,也就是二维高斯低通滤波。当时用的都是Matlab中,现成的图像处理库。只需要输入sigma和kernelsize这些参数就行了,完全不需要考虑高斯核中的每个点长啥样。虽然教科书里面也会有一些配图,例如:直到后来,我学习高斯图像金字塔的时候发现,在别人的代码里面,他在生成二维高斯核的时候,并不是直接写
- 线性代数向量内积_向量的点积| 使用Python的线性代数
cumubi7453
python线性代数机器学习numpy算法
线性代数向量内积Prerequisite:LinearAlgebra|DefiningaVector先决条件:线性代数|定义向量Linearalgebraisthebranchofmathematicsconcerninglinearequationsbyusingvectorspacesandthroughmatrices.Inotherwords,avectorisamatrixinn-dim
- OpenGL: OpenGL+Qt实现介绍 (一)
程序员小马兰
OpenGL+Qt计算机视觉图形渲染前端
一、通过这个教程我们能学到什么?1、计算机图形学的基础知识。2、使用OpenGL在QT中进行编程。3、使用OpenGL做出一些很酷的效果。二、需要哪些预备知识?1、熟悉C++编程语言、Qt基本操作。2、数学基础知识(线性代数、几何、三角学)。三、为什么要学习OpenGL?各种三维图形引擎,原理都类似,几乎没什么差别,学好了OpenGL对Unity3D、虚幻引擎、OSG、webGL等的使用都会有巨大
- python数据分析scipy库安装与使用
范哥来了
python数据分析scipy
安装scipy库scipy是一个用于科学计算的Python库,它依赖于numpy。如果你还没有安装scipy,可以使用以下命令来安装:pipinstallscipy或者,如果你使用的是Anaconda环境,可以通过conda来安装:condainstallscipy使用scipy库scipy提供了许多用于科学计算的功能,包括统计、优化、积分、线性代数等。下面是一些常见的用法示例。1.导入scipy
- SciPy 安装使用教程
小奇JAVA面试
安装使用教程scipy
一、SciPy简介SciPy(ScientificPython)是基于NumPy的开源科学计算库,提供了数值积分、优化、信号处理、线性代数、统计分析等高级科学计算功能。它是构建Python科学计算生态系统的核心组件之一,常用于科研、工程、数据分析等领域。二、安装SciPy2.1使用pip安装(推荐)pipinstallscipy2.2使用Anaconda安装(科学计算推荐)condainstall
- 线性相关和线性无关
我推是大富翁
线性代数线性代数
在线性代数中,线性相关和线性无关是刻画向量组性质的核心概念,以下是关于它们的重要结论总结:一、基本定义与核心判定线性相关的定义向量组{α1,α2,…,αm}\{\alpha_1,\alpha_2,\dots,\alpha_m\}{α1,α2,…,αm}线性相关,当且仅当存在不全为零的实数k1,k2,…,kmk_1,k_2,\dots,k_mk1,k2,…,km线性无关的定义向量组{α1,α2,…,
- 线性代数-第9篇:二次型与正定矩阵:优化问题的数学基础
程序员勇哥
人工智能(AI)线性代数人工智能大数据python
线性代数-第9篇:二次型与正定矩阵:优化问题的数学基础在人工智能、量化投资和大数据分析中,优化问题无处不在,比如机器学习的损失函数最小化、量化投资组合的风险最小化等。而二次型与正定矩阵作为线性代数中的重要概念,为解决这些优化问题提供了坚实的数学基础。本篇将深入解析它们的原理及其在实际场景中的关键应用。一、二次型:从向量到函数的桥梁1.定义与表达式二次型是一个关于向量x\mathbf{x}x的二次齐
- 阅读笔记(2) 单层网络:回归
a2507283885
笔记
阅读笔记(2)单层网络:回归该笔记是DataWhale组队学习计划(共度AI新圣经:深度学习基础与概念)的Task02以下内容为个人理解,可能存在不准确或疏漏之处,请以教材为主。1.从泛函视角来看线性回归还记得线性代数里学过的“基”这个概念吗?一组基向量是一组线性无关的向量,它们通过线性组合可以张成一个向量空间。也就是说,这个空间里的任意一个向量,都可以表示成这组基的线性组合。函数其实也可以看作是
- C# vs Python:谁更适合初学者?用5个关键点教你掌握深度学习中的线性代数
墨瑾轩
一起学学C#【四】c#python深度学习
关注墨瑾轩,带你探索编程的奥秘!超萌技术攻略,轻松晋级编程高手技术宝库已备好,就等你来挖掘订阅墨瑾轩,智趣学习不孤单即刻启航,编程之旅更有趣嘿,小伙伴们!今天我们要一起探索如何使用C#来入门深度学习的世界,特别关注其中的线性代数部分。你可能会好奇:“为什么是C#而不是Python?”别急,我们会在接下来的内容中详细解释这个问题,并通过对比两种语言的特点,让你明白选择C#进行深度学习并不是一个坏主意
- 线性代数和c语言先学哪个,线性代数和哪个更有用?
段丞博
线性代数和c语言先学哪个
一、从数学与应用数学这个专业来分析下“线性代数”和“高等数学”这两块的内容,无论哪块知识在“考研究生数学科目中的考试”都会涉汲到的,而且有些专业的考试也包括概率论与数理统计这块知识。线性代数和哪个更有用?1、线性代数内容:行列式、矩阵、向量、线性方程组、特征值和特征向量、二次型。2、高等数学内容:函数·极限·连续、导数与微分、不定积分、定积分及广义积分、中值定理的证明、常微分方程、一元微积分的应用
- 数学:线性相关和线性无关的关系
千码君2016
数学线性代数系数唯一性定义法矩阵秩法行列式法高维空间的基线性方程组
在线性代数中,线性无关是描述向量组性质的重要概念,它反映了向量组中向量之间是否存在“冗余”或“依赖”关系。以下从定义、判断方法、几何意义及应用等方面详细说明:一、线性无关的定义才成立,则称该向量组线性无关。反之,若存在不全为0的系数使等式成立,则称向量组线性相关。二、核心理解:线性无关的本质三、线性无关的判断方法1.定义法(直接验证)2.矩阵秩法
- 4、理解线性代数的核心概念与应用
rice5
线性代数第五版深度解析线性代数向量空间子空间
理解线性代数的核心概念与应用1引言线性代数是现代数学的重要分支之一,广泛应用于科学、工程、计算机科学等领域。理解线性代数的基本概念和原理不仅有助于学术研究,还能够提升解决实际问题的能力。本文将深入探讨线性代数中的核心概念,帮助读者建立坚实的理论基础,并掌握实际应用技巧。2向量空间向量空间是线性代数的基础概念之一。一个向量空间(V)是指一个集合,其元素称为向量,并且这些向量之间可以进行加法运算和标量
- (线性代数最小二乘问题)Normal Equation(正规方程)
音程
数学线性代数机器学习人工智能
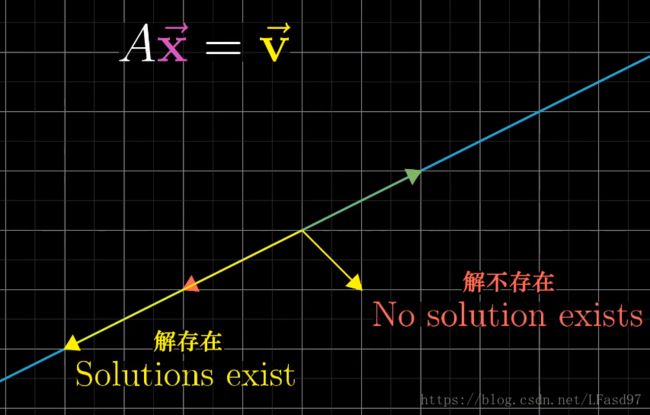
NormalEquation(正规方程)是线性代数中的一个重要概念,主要用于解决最小二乘问题(LeastSquaresProblem)。它通过直接求解一个线性方程组,找到线性回归模型的最优参数(如权重或系数)。以下是详细介绍:1.定义与数学表达式给定一个超定方程组(方程数量多于未知数):Ax=bA\mathbf{x}=\mathbf{b}Ax=b其中:A∈Rm×nA\in\mathbb{R}^{m
- ICBDDM2025:大数据与数字化管理前沿峰会
鸭鸭鸭进京赶烤
学术会议大数据图像处理计算机视觉AI编程人工智能机器人考研
在选择大学专业时,可以先从自身兴趣、能力和职业规划出发,初步确定几个感兴趣的领域。然后结合外部环境因素,如专业前景、教育资源和就业情况等,对这些专业进行深入的分析和比较。大数据专业:是一个热门且前沿的学科领域,它涉及到数据的收集、存储、处理、分析和应用等多个方面。课程设置基础课程数学基础:高等数学、线性代数、概率论与数理统计等。这些课程为大数据分析提供了必要的数学工具,例如线性代数在机器学习算法中
- 矩阵阶数(线性代数) vs. 张量维度(深度学习):线性代数与深度学习的基石辨析,再也不会被矩阵阶数给混淆了
Ven%
简单入门pytorch线性代数矩阵深度学习pytorchtensor张量人工智能
文章目录前言第一部分:重温矩阵阶数-方阵的专属标签第二部分:深入张量维度-深度学习的多维容器第三部分:核心区别总结第四部分:在深度学习中为何混淆?如何区分?结论前言在线性代数的殿堂里,“矩阵阶数”是一个基础而明确的概念。然而,当我们踏入深度学习的领域,面对的是更高维的数据结构——张量(Tensor),描述其大小的术语变成了“维度(Dimensions)”或更精确地说“形状(Shape)”。这两个概
- AI大模型学习路线(2025最新)神仙级大模型教程分享,非常详细收藏这一篇就够!
AI大模型-大飞
人工智能学习语言模型大模型大模型学习LLMAI大模型
大模型学习路线图前排提示,文末有大模型AGI-CSDN独家资料包哦!第一阶段:基础知识准备在这个阶段,您需要打下坚实的数学基础和编程基础,这是学习任何机器学习和深度学习技术所必需的。1.数学基础线性代数:矩阵运算、向量空间、特征值与特征向量等。概率统计:随机变量、概率分布、贝叶斯定理等。微积分:梯度、偏导数、积分等。学习资料书籍:GilbertStrang,《线性代数及其应用》SheldonRos
- GNU Octave 基础教程(8):GNU Octave 常用数学函数
方博士AI机器人
GNUOctave基础教程机器学习算法人工智能
目录一、基本算术运二、初等数学函数三、三角函数与反三角函数四、统计函数五、复数与其他函数✅小结下一讲预告GNUOctave内置了大量数学函数,涵盖初等数学、线性代数、复数运算、统计函数等,非常适合科研、工程计算使用。本节将系统地梳理Octave中最常用的数学函数,并附上示例代码与输出结果。一、基本算术运运算符号/函数示例加法+a+b减法-a-b乘法*/.*A*B(矩阵乘法),A.*B(逐元素)除法
- 数学符号和标识中英文列表(含义与示例)
纸上笔下
MatheMatiCs算法数学符号英文中文微积分导数
数学符号和标识的参考,涵盖了数学的各个主要分支,并提供清晰的定义和示例,方便快速查找和学习收藏。目录基础数学符号几何符号代数符号线性代数符号概率与统计符号集合论符号逻辑符号微积分与分析符号数字与字母符号特点中英对照:提供符号的英文术语,方便国际交流和文献阅读。应用示例:提供典型数学表达式,例如导数计算(ddx(x2)=2x\frac{d}{dx}(x^2)=2xdxd(x2)=2x)。1.基础数学
- 【AI中的数学-人工智能的数学基石】数学:构建AI大厦的基石
云博士的AI课堂
AI中的数学人工智能AI数学AI中的数学AI数学大模型
第一章人工智能的数学基石第四节数学:构建AI大厦的基石数学是人工智能(AI)的核心基石,贯穿于AI算法的设计、模型的构建以及系统的优化过程中。正如建筑大厦需要坚实的地基,AI的发展依赖于深厚的数学理论和方法。理解和掌握这些数学原理,不仅能够提升对AI技术的理解,还能为创新和解决复杂问题提供强有力的工具。本节将系统性地探讨支撑AI的主要数学领域,包括线性代数、微积分、概率与统计、优化理论以及离散数学
- python scipy简介
凤枭香
Python图像处理pythonscipy开发语言图像处理
scipyscipy是一个python开源的数学计算库,可以应用于数学、科学以及工程领域,它是基于numpy的科学计算库。主要包含了统计学、最优化、线性代数、积分、傅里叶变换、信号处理和图像处理以及常微分方程的求解以及其他科学工程中所用到的计算。scipy模块介绍scipy主要通过下面这些包来实现数学算法和科学计算,后面对于scipy的讲解主要也是基于这些包来实现的cluster:包含聚类算法co
- 数学中的泛函分析与算子理论
AI天才研究院
计算AI大模型应用入门实战与进阶ChatGPT实战大数据人工智能语言模型AILLMJavaPython架构设计AgentRPA计算AI大模型应用
1.背景介绍1.1数学的发展与泛函分析的产生数学作为一门科学,自古以来就在不断地发展和演变。从最初的算术、几何,到后来的微积分、线性代数,再到现代的拓扑学、概率论等,数学的研究领域不断扩展。泛函分析作为一门现代数学的分支,起源于20世纪初,它主要研究无限维空间中的函数和算子,为许多现代科学和工程问题提供了理论基础。1.2泛函分析与算子理论的关系泛函分析与算子理论密切相关。泛函分析主要研究无限维空间
- 数学基础(线性代数、概率统计、微积分)缺乏导致概念难以理解问题大全
猫头虎技术团队
已解决的Bug专栏线性代数opencv数据挖掘语音识别计算机视觉人工智能机器学习
数学基础(线性代数、概率统计、微积分)缺乏导致概念难以理解问题大全机器学习/深度学习的核心算法背后,往往需要用到矩阵运算、特征向量、梯度下降等;如果连矩阵乘法、特征值、偏导数都没搞懂,就很难理解模型原理。摘要文章目录数学基础(线性代数、概率统计、微积分)缺乏导致概念难以理解问题大全摘要1.开发场景介绍1.1场景背景1.2技术细节2.开发环境3.问题分析3.1线性代数缺失带来的挑战3.2概率统计短板
- C语言实现矩阵转置
人才程序员
C语言系列课程c语言矩阵算法开发语言后端软件工程软件构建
文章目录C语言实现矩阵转置1.什么是矩阵转置?2.矩阵转置的C语言实现2.1定义矩阵2.2转置矩阵2.3示例代码2.4代码解析3.运行示例4.总结C语言实现矩阵转置矩阵转置是线性代数中的一个基本操作,它将一个矩阵的行和列交换。在计算机中,矩阵转置常常用来处理数据结构的优化、图像处理、图形学等领域。在C语言中,实现矩阵转置相对简单。本文将详细介绍矩阵转置的概念、实现方法,并通过示例代码来帮助你理解矩
- 学习大模型---需要掌握的数学知识
喜欢猪猪
决策树机器学习人工智能
1.线性代数:乐高积木的世界想象你有很多乐高积木块。线性代数就是研究怎么用这些积木块搭建东西,以及这些搭建好的东西有什么特性的学问。向量:就像一个有方向的箭头,或者一组排好队的数字。比如:一个箭头:从你家指向学校,有长度(多远)和方向(哪边)。一组数字:[身高,体重,年龄]可以代表一个人。[苹果2个,香蕉3根]可以代表你的水果篮子。向量就是描述事物的一个列表。矩阵:想象一个大表格,就像班级花名册,
- C语言实现4x4矩阵乘法的详细教程
Kimgoeunlaogong
本文还有配套的精品资源,点击获取简介:矩阵乘法是线性代数的基本操作,在计算机科学的多个领域中有广泛应用。本文详细解释了如何用C语言编写程序来实现两个4x4矩阵的乘法。我们将探讨矩阵乘法的数学原理,并通过C语言的二维数组和嵌套循环来编写代码。该程序将为学习线性代数和C语言编程提供一个实践案例。1.矩阵乘法的数学原理矩阵乘法不仅在线性代数中占据着重要地位,也是计算机科学中不可或缺的一部分。了解矩阵乘法
- 【图像处理入门】8. 数学基础与优化:线性代数、概率与算法调优实战
小米玄戒Andrew
图像处理:从入门到专家图像处理线性代数算法python计算机视觉概率论算法调优
摘要图像处理的核心离不开数学工具的支撑。本文将深入解析线性代数、概率论在图像领域的应用,包括矩阵变换与图像几何操作的关系、噪声模型的数学描述,以及遗传算法、粒子群优化等智能算法在参数调优中的实践。通过理论结合代码案例,帮助读者掌握从数学原理到工程优化的完整链路。一、线性代数:图像变换的数学基石1.矩阵运算与图像几何变换在图像处理入门3中,我们通过仿射变换矩阵实现图像平移、旋转与缩放。其本质是线性代
- 12 行列式01---定义、计算: 二级行列式 ,三阶行列式,n 阶行列式,排列、逆序数
炫云云
深度学习数学理论线性代数自然语言处理数据挖掘深度学习
感谢各位观看这篇文章,点赞、收藏、你的支持是我前进的动力!感谢你的阅读,专栏文章持续更新!关注不迷路!!矩阵线性代数笔记整理汇总,超全面文章目录二级行列式三级行列式n级行列式1、排列2、逆序数排列的性质3、n阶行列式上三角形行列参考12行列式01—定义、计算:二级行列式,三阶行列式,n阶行列式,排列、逆序数12行列式01—定义、计算与性质:n级行列式的性质、
- 线性代数笔记1-二阶行列式和三阶行列式
jack021457
线性代数线性代数矩阵
文章目录前言一、二阶行列式1.二阶行列式的定义2.二阶行列式的计算二、三阶行列式1.三阶行列式的定义2.三阶行列式的计算三、排列与逆序1.排列定义1:定义2:2.逆序定义:逆序数偶排列和奇排列标准排列(自然排列)N(n,(n-1)...3,2,1)的逆序数有几个对换在所有的n级排列中,奇排列和偶排列个数相等,各占一半,也就是n!2\frac{n!}{2}2n!总结前言本笔记记录自B站《线性代数》高
- 线性代数导引:附录:行列式几何解释
AGI大模型与大数据研究院
AI大模型应用开发实战计算科学神经计算深度学习神经网络大数据人工智能大型语言模型AIAGILLMJavaPython架构设计AgentRPA
1.背景介绍线性代数是数学中的一个重要分支,它研究的是向量空间和线性变换。在计算机科学中,线性代数被广泛应用于图形学、机器学习、数据挖掘等领域。行列式是线性代数中的一个重要概念,它可以用来求解线性方程组的解、计算矩阵的逆、判断矩阵是否可逆等问题。本文将介绍行列式的几何解释,帮助读者更好地理解行列式的概念和应用。2.核心概念与联系2.1向量的叉积向量的叉积是指两个向量的乘积得到的另一个向量。设向量$
- scala的option和some
矮蛋蛋
编程scala
原文地址:
http://blog.sina.com.cn/s/blog_68af3f090100qkt8.html
对于学习 Scala 的 Java™ 开发人员来说,对象是一个比较自然、简单的入口点。在 本系列 前几期文章中,我介绍了 Scala 中一些面向对象的编程方法,这些方法实际上与 Java 编程的区别不是很大。我还向您展示了 Scala 如何重新应用传统的面向对象概念,找到其缺点
- NullPointerException
Cb123456
androidBaseAdapter
java.lang.NullPointerException: Attempt to invoke virtual method 'int android.view.View.getImportantForAccessibility()' on a null object reference
出现以上异常.然后就在baidu上
- PHP使用文件和目录
天子之骄
php文件和目录读取和写入php验证文件php锁定文件
PHP使用文件和目录
1.使用include()包含文件
(1):使用include()从一个被包含文档返回一个值
(2):在控制结构中使用include()
include_once()函数需要一个包含文件的路径,此外,第一次调用它的情况和include()一样,如果在脚本执行中再次对同一个文件调用,那么这个文件不会再次包含。
在php.ini文件中设置
- SQL SELECT DISTINCT 语句
何必如此
sql
SELECT DISTINCT 语句用于返回唯一不同的值。
SQL SELECT DISTINCT 语句
在表中,一个列可能会包含多个重复值,有时您也许希望仅仅列出不同(distinct)的值。
DISTINCT 关键词用于返回唯一不同的值。
SQL SELECT DISTINCT 语法
SELECT DISTINCT column_name,column_name
F
- java冒泡排序
3213213333332132
java冒泡排序
package com.algorithm;
/**
* @Description 冒泡
* @author FuJianyong
* 2015-1-22上午09:58:39
*/
public class MaoPao {
public static void main(String[] args) {
int[] mao = {17,50,26,18,9,10
- struts2.18 +json,struts2-json-plugin-2.1.8.1.jar配置及问题!
7454103
DAOspringAjaxjsonqq
struts2.18 出来有段时间了! (貌似是 稳定版)
闲时研究下下! 貌似 sruts2 搭配 json 做 ajax 很吃香!
实践了下下! 不当之处请绕过! 呵呵
网上一大堆 struts2+json 不过大多的json 插件 都是 jsonplugin.34.jar
strut
- struts2 数据标签说明
darkranger
jspbeanstrutsservletScheme
数据标签主要用于提供各种数据访问相关的功能,包括显示一个Action里的属性,以及生成国际化输出等功能
数据标签主要包括:
action :该标签用于在JSP页面中直接调用一个Action,通过指定executeResult参数,还可将该Action的处理结果包含到本页面来。
bean :该标签用于创建一个javabean实例。如果指定了id属性,则可以将创建的javabean实例放入Sta
- 链表.简单的链表节点构建
aijuans
编程技巧
/*编程环境WIN-TC*/ #include "stdio.h" #include "conio.h"
#define NODE(name, key_word, help) \ Node name[1]={{NULL, NULL, NULL, key_word, help}}
typedef struct node { &nbs
- tomcat下jndi的三种配置方式
avords
tomcat
jndi(Java Naming and Directory Interface,Java命名和目录接口)是一组在Java应用中访问命名和目录服务的API。命名服务将名称和对象联系起来,使得我们可以用名称
访问对象。目录服务是一种命名服务,在这种服务里,对象不但有名称,还有属性。
tomcat配置
- 关于敏捷的一些想法
houxinyou
敏捷
从网上看到这样一句话:“敏捷开发的最重要目标就是:满足用户多变的需求,说白了就是最大程度的让客户满意。”
感觉表达的不太清楚。
感觉容易被人误解的地方主要在“用户多变的需求”上。
第一种多变,实际上就是没有从根本上了解了用户的需求。用户的需求实际是稳定的,只是比较多,也比较混乱,用户一般只能了解自己的那一小部分,所以没有用户能清楚的表达出整体需求。而由于各种条件的,用户表达自己那一部分时也有
- 富养还是穷养,决定孩子的一生
bijian1013
教育人生
是什么决定孩子未来物质能否丰盛?为什么说寒门很难出贵子,三代才能出贵族?真的是父母必须有钱,才能大概率保证孩子未来富有吗?-----作者:@李雪爱与自由
事实并非由物质决定,而是由心灵决定。一朋友富有而且修养气质很好,兄弟姐妹也都如此。她的童年时代,物质上大家都很贫乏,但妈妈总是保持生活中的美感,时不时给孩子们带回一些美好小玩意,从来不对孩子传递生活艰辛、金钱来之不易、要懂得珍惜
- oracle 日期时间格式转化
征客丶
oracle
oracle 系统时间有 SYSDATE 与 SYSTIMESTAMP;
SYSDATE:不支持毫秒,取的是系统时间;
SYSTIMESTAMP:支持毫秒,日期,时间是给时区转换的,秒和毫秒是取的系统的。
日期转字符窜:
一、不取毫秒:
TO_CHAR(SYSDATE, 'YYYY-MM-DD HH24:MI:SS')
简要说明,
YYYY 年
MM 月
- 【Scala六】分析Spark源代码总结的Scala语法四
bit1129
scala
1. apply语法
FileShuffleBlockManager中定义的类ShuffleFileGroup,定义:
private class ShuffleFileGroup(val shuffleId: Int, val fileId: Int, val files: Array[File]) {
...
def apply(bucketId
- Erlang中有意思的bug
bookjovi
erlang
代码中常有一些很搞笑的bug,如下面的一行代码被调用两次(Erlang beam)
commit f667e4a47b07b07ed035073b94d699ff5fe0ba9b
Author: Jovi Zhang <
[email protected]>
Date: Fri Dec 2 16:19:22 2011 +0100
erts:
- 移位打印10进制数转16进制-2008-08-18
ljy325
java基础
/**
* Description 移位打印10进制的16进制形式
* Creation Date 15-08-2008 9:00
* @author 卢俊宇
* @version 1.0
*
*/
public class PrintHex {
// 备选字符
static final char di
- 读《研磨设计模式》-代码笔记-组合模式
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
import java.util.ArrayList;
import java.util.List;
abstract class Component {
public abstract void printStruct(Str
- 利用cmd命令将.class文件打包成jar
chenyu19891124
cmdjar
cmd命令打jar是如下实现:
在运行里输入cmd,利用cmd命令进入到本地的工作盘符。(如我的是D盘下的文件有此路径 D:\workspace\prpall\WEB-INF\classes)
现在是想把D:\workspace\prpall\WEB-INF\classes路径下所有的文件打包成prpall.jar。然后继续如下操作:
cd D: 回车
cd workspace/prpal
- [原创]JWFD v0.96 工作流系统二次开发包 for Eclipse 简要说明
comsci
eclipse设计模式算法工作swing
JWFD v0.96 工作流系统二次开发包 for Eclipse 简要说明
&nb
- SecureCRT右键粘贴的设置
daizj
secureCRT右键粘贴
一般都习惯鼠标右键自动粘贴的功能,对于SecureCRT6.7.5 ,这个功能也已经是默认配置了。
老版本的SecureCRT其实也有这个功能,只是不是默认设置,很多人不知道罢了。
菜单:
Options->Global Options ...->Terminal
右边有个Mouse的选项块。
Copy on Select
Paste on Right/Middle
- Linux 软链接和硬链接
dongwei_6688
linux
1.Linux链接概念Linux链接分两种,一种被称为硬链接(Hard Link),另一种被称为符号链接(Symbolic Link)。默认情况下,ln命令产生硬链接。
【硬连接】硬连接指通过索引节点来进行连接。在Linux的文件系统中,保存在磁盘分区中的文件不管是什么类型都给它分配一个编号,称为索引节点号(Inode Index)。在Linux中,多个文件名指向同一索引节点是存在的。一般这种连
- DIV底部自适应
dcj3sjt126com
JavaScript
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd">
<html xmlns="http://www.w3.org/1999/xhtml&q
- Centos6.5使用yum安装mysql——快速上手必备
dcj3sjt126com
mysql
第1步、yum安装mysql
[root@stonex ~]# yum -y install mysql-server
安装结果:
Installed:
mysql-server.x86_64 0:5.1.73-3.el6_5 &nb
- 如何调试JDK源码
frank1234
jdk
相信各位小伙伴们跟我一样,想通过JDK源码来学习Java,比如collections包,java.util.concurrent包。
可惜的是sun提供的jdk并不能查看运行中的局部变量,需要重新编译一下rt.jar。
下面是编译jdk的具体步骤:
1.把C:\java\jdk1.6.0_26\sr
- Maximal Rectangle
hcx2013
max
Given a 2D binary matrix filled with 0's and 1's, find the largest rectangle containing all ones and return its area.
public class Solution {
public int maximalRectangle(char[][] matrix)
- Spring MVC测试框架详解——服务端测试
jinnianshilongnian
spring mvc test
随着RESTful Web Service的流行,测试对外的Service是否满足期望也变的必要的。从Spring 3.2开始Spring了Spring Web测试框架,如果版本低于3.2,请使用spring-test-mvc项目(合并到spring3.2中了)。
Spring MVC测试框架提供了对服务器端和客户端(基于RestTemplate的客户端)提供了支持。
&nbs
- Linux64位操作系统(CentOS6.6)上如何编译hadoop2.4.0
liyong0802
hadoop
一、准备编译软件
1.在官网下载jdk1.7、maven3.2.1、ant1.9.4,解压设置好环境变量就可以用。
环境变量设置如下:
(1)执行vim /etc/profile
(2)在文件尾部加入:
export JAVA_HOME=/home/spark/jdk1.7
export MAVEN_HOME=/ho
- StatusBar 字体白色
pangyulei
status
[[UIApplication sharedApplication] setStatusBarStyle:UIStatusBarStyleLightContent];
/*you'll also need to set UIViewControllerBasedStatusBarAppearance to NO in the plist file if you use this method
- 如何分析Java虚拟机死锁
sesame
javathreadoracle虚拟机jdbc
英文资料:
Thread Dump and Concurrency Locks
Thread dumps are very useful for diagnosing synchronization related problems such as deadlocks on object monitors. Ctrl-\ on Solaris/Linux or Ctrl-B
- 位运算简介及实用技巧(一):基础篇
tw_wangzhengquan
位运算
http://www.matrix67.com/blog/archives/263
去年年底写的关于位运算的日志是这个Blog里少数大受欢迎的文章之一,很多人都希望我能不断完善那篇文章。后来我看到了不少其它的资料,学习到了更多关于位运算的知识,有了重新整理位运算技巧的想法。从今天起我就开始写这一系列位运算讲解文章,与其说是原来那篇文章的follow-up,不如说是一个r
- jsearch的索引文件结构
yangshangchuan
搜索引擎jsearch全文检索信息检索word分词
jsearch是一个高性能的全文检索工具包,基于倒排索引,基于java8,类似于lucene,但更轻量级。
jsearch的索引文件结构定义如下:
1、一个词的索引由=分割的三部分组成: 第一部分是词 第二部分是这个词在多少