【Unity编程】Unity中关于四元数的API详解
Unity中关于四元数的API详解
Quaternion类
Quaternion(四元数)用于计算Unity旋转。它们计算紧凑高效,不受万向节锁的困扰,并且可以很方便快速地进行球面插值。 Unity内部使用四元数来表示所有的旋转。
Quaternion是基于复数,并不容易直观地理解。 不过你几乎不需要访问或修改单个四元数参数(x,y,z,w); 大多数情况下,你只需要获取和使用现有的旋转(例如来自“Transform”),或者用四元数来构造新的旋转(例如,在两次旋转之间平滑插入)。
大部分情况下,你可能会使用到这些函数:
- Quaternion.LookRotation,
- Quaternion.Angle
- Quaternion.Euler
- Quaternion.Slerp
- Quaternion.FromToRotation
- Quaternion.identity。
Quaternion 是一个结构体,本身成员变量相对简单,可以作为函数参数高效传递。
Unity默认方向
在深入了解API之前,我们需要先明确一些基本的概念,就是方向、旋转究竟是如何表示的。
Unity中使用左手坐标系,假如把世界坐标系跟东南西北进行结合起来看,大致如下图所示:
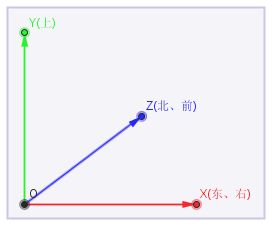
默认的方向对应如下表:
| 坐标轴 | 对应方向 |
|---|---|
| +x | 右(东) |
| -x | 左(西) |
| +y | 上 |
| -y | 下 |
| +Z | 前(北) |
| -Z | 后(南) |
假设以你自己身体为例,你站立在地面上,面朝北方,此时就是默认方向,也就是Unity中的方向就是面向+Z轴方向,那么此时+X轴在东方,+Y轴对应正上方。此时对应的欧拉角是(0,0,0),此时对应的前方矢量是(0,0,1),上方矢量是(0,1,0)。
这里我区分了左右上下前后的概念,因为这些概念同时也对应了Vector3类、Transform类中的相应的方向函数。
方向的表示法
①欧拉角表示法
假如你使用一组欧拉角表示旋转,XYZ三个参数代表相应轴向按照顺归YZX的旋转,因此(0、90、90)代表先进行+Z轴旋转90度,再沿着+Y轴进行90度旋转,更多详细内容可以参考前述文章《【Unity编程】Unity中的欧拉旋转》。
②前方上方矢量界定法
编程过程中,大部分需要明确指定方位的时候就需要使用这个方法。要确定一个朝向,我们可以使用两个向量来确定:即前方矢量和上方矢量。当一个朝向的前方和上方确定之后,这个朝向也就完全确定了。
举例来说,如果现在只提供一个朝向,就是你现在面朝北方,那么这个方向已经完全确定了吗?显然没有。因为你右侧躺在地上,看向北方,还是在面朝北方,这时候就需要另外一个矢量,也就是上方。当给出上方之后,这个朝向就完全确定了。
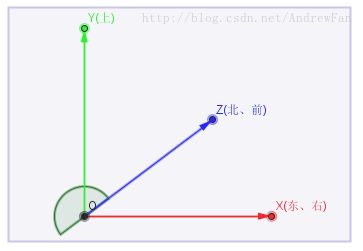
上方需要严格给出吗?
在Unity中,我们很多时候,不需要给出严格的上方朝向。比如,仍然是上面那个例子,如果我面朝北方,先给出(0,0,1)代表我的前方矢量。那么,如果我给出的方向不是严格的上方矢量,比如是(0,0.5,0.5),是否可以?答案也是可以的,因为这两个矢量显然已经确定了一个方向,前方是严格的,而实际的上方可以通过前方朝着你给出的上方矢量旋转90度得出。也就是说,你给(0,1,0)作为上方矢量,和给出在下图中弧度范围内(不包含+Z和-Z)所有方向的矢量都是相同的结果。
③绕轴旋转界定法
第三种定义旋转的方法就是围绕某个指定的轴向旋转一定的角度。这个方法也可以确定一个相对旋转,它以从默认方向(此时前方+Z,上方+Y)出发,沿着指定的轴向进行指定角度的旋转,旋转后的前方和上方是确定的。因此这个方法也可以用来确定朝向。
④A向到B向相对旋转表示法
还有一种方法就是从A向到B向的相对旋转,这种表示了一个旋转的相对变化。比如A为(0,1,0),B为(0,0,1),也就是相对旋转量代表原来的上方被旋转到了前方,这样的一个四元数也可以用欧拉角表示成(90,0,0),也就是沿着+X轴旋转了90度。
注意上面四中表示方法中,有的明确表明了上方矢量,有的好像只明确了前方矢量,要明确的一点就是,它们都是从默认矢量出发的,如果没有明确指定上方朝向,那么就是使用默认的上方,也就是+Y方向。
成员变量
- eulerAngles 欧拉角,返回当前四元数所对应的欧拉角
- this[int] 可以使用类似数组和下标的形式从四元数中获取四个四元数参数
- x、y、z、w 分别代表x、y、z、w 参数,具体代表的内容可以参考前文《【Unity编程】四元数(Quaternion)与欧拉角》,你最好不要通过修改四个参数来改变四元数,除非你真的非常了解它们的含义。
静态成员
- identity 单位四元数,也就是默认的无旋转状态,此时与世界坐标相同,前方指向+Z,上方指向+Y
成员函数
| 函数形式 | 解释 |
|---|---|
| void Set(float new_x, float new_y, float new_z, float new_w) | 设置x、y、z、w 分量,与this[]功能相同 |
| void SetFromToRotation(Vector3 fromDirection, Vector3 toDirection) | 设置成静态函数FromToRotation的结果 |
| void SetLookRotation(Vector3 view, Vector3 up = Vector3.up) | 设置成静态函数LookRotation的结果 |
| void ToAngleAxis(out float angle, out Vector3 axis) | 设置成静态函数AngleAxis的结果 |
说明:成员函数几个set方法多用于将当前四元数设置成目标四元数,目标四元数的构建方法与对应名称的静态函数相同。
静态函数
| 函数形式 | 解释 |
|---|---|
| static float Angle(Quaternion a, Quaternion b) | 计算两个四元数前方矢量之间的夹角度数 |
| static Quaternion AngleAxis(float angle, Vector3 axis) | 构建一个四元数,它表示沿着一个轴旋转固定角度,即上述表示法③ |
| static float Dot(Quaternion a, Quaternion b) | 计算两个四元数之间的点积,返回一个标量,这个函数一般用不到,它的点积不代表什么具体的物理含义,具体定义方法见我的前述文章 |
| static Quaternion Euler(float x, float y, float z) | 构建一个四元数,它用欧拉旋转表示,即上述表示法① |
| static Quaternion FromToRotation(Vector3 fromDirection, Vector3 toDirection) | 构建一个四元数,它表示从指向fromDirection方向到指向toDirection方向的相对旋转量,见上述表示法④ |
| static Quaternion Inverse(Quaternion rotation) | 构建一个四元数,它是指定的四元数的逆,也就是逆向旋转,比如原四元数表示相对+X轴旋转了90度,那么此函数结果就是相对+X轴旋转了-90度 |
| static Quaternion Lerp(Quaternion a, Quaternion b, float t) | 构建一个四元数,表示从四元数a到b的球面插值,所谓的插值也就是中间旋转量,从a作为起点,此时对应t为0,到b为终点,此时对应t为1。当t取0-1之间的小数时,就代表了中间的插值结果。这个方法与Slerp相同,计算速度快,但是精度低,如果相对旋转变化量很小,则效果不理想 |
| static Quaternion LerpUnclamped(Quaternion a, Quaternion b, float t) | 与Lerp相同,区别是,Lerp的t值会被钳制在[0,1]之间,而此方法则不会,t允许超出计算 |
| static Quaternion LookRotation(Vector3 forward, Vector3 upwards = Vector3.up) | 构建一个四元数,使用前方上方矢量确定朝向,也就是上述表示法② |
| static Quaternion RotateTowards(Quaternion from, Quaternion to, float maxDegreesDelta) | 构建一个四元数,表示从一个四元数from(的前方)向着另外一个四元数(的前方)旋转,但不能超出指定的角度,也就是如果两个前方矢量夹角超过指定角度,则旋转到达指定角度时就停止,若是夹角本身不足的话,则结果直接为目标四元数to,与上述表示法④的意思很接近 |
| static Quaternion Slerp(Quaternion a, Quaternion b, float t) | 球面插值,与Lerp功能相同,t值也被钳制,计算精度高,但是速度相对较慢 |
| static Quaternion SlerpUnclamped(Quaternion a, Quaternion b, float t) | 与Slerp功能相同,只是t值不被钳制,允许超出计算 |
| static Quaternion operator * (Quaternion lhs, Quaternion rhs) | 乘法运算符重载,当表示两个连续的旋转时,可以使用lhs * rhs的形式得出连续旋转的结果,lhs为左值,rhs为右值。注意左值是先进行的旋转,叠加右值旋转。用法示例:lhs = lhs * rhs; |
| static Vector3 operator *(Quaternion rotation, Vector3 point) | 乘法运算符重载,表示对一个矢量point施加旋转rotation,得出旋转后的结果矢量。用法示例:Vector3 result=rotation * point |
验证前方上方矢量表示法
为了验证前方上方矢量表示法的实际上方会重新计算,我设计了以下小实验。
在场景中设置三个物体,它们的朝向是打乱的,从左到右分别对应1、2、3。可以使用以下代码将三个物体朝向调整为一致。
//前方上方矢量界定法的实际上方会重新计算
m_t1.transform.rotation = Quaternion.LookRotation(Vector3.forward, Vector3.up);
m_t2.transform.rotation = Quaternion.LookRotation(Vector3.forward, new Vector3(0,0.5f,-0.5f));
m_t3.transform.rotation = Quaternion.LookRotation(Vector3.forward, new Vector3(0,0.5f,0.5f));
在start方法中执行上述代码后,如下:
三个物体朝向是一致的,也就说明了上方矢量确实是进行了重新计算。
总结几种表示方法
下面使用代码总结几种表示法,对应同样的四元数,大致有四种表示方法。
//旋转量的4种表示形式
Quaternion q1=Quaternion.Euler(90, 0, 0);
Quaternion q2 = Quaternion.LookRotation(Vector3.down ,Vector3.forward);
Quaternion q3 = Quaternion.AngleAxis(90,Vector3.right);
Quaternion q4 = Quaternion.FromToRotation(Vector3.up, Vector3.forward);
showQ("q1",q1);
showQ("q2",q2);
showQ("q3",q3);
showQ("q4",q4);
它们的输出结果是:
也就是说,这几种形式表示的四元数结果完全相同。
将四元数旋转应用于子弹射击示例
当枪管转动起来,子弹仍然沿着正确的朝向发射出去,可以使用很简单的几句话,修改之前的代码后如下:
Bullet_2 bullet = m_compPool.takeUnit();
//发射时,将子弹的初始位置为枪口的当前位置
bullet.m_transform.position = m_transform.position;
//将子弹的初始化旋转设置为指向当前枪口前方
bullet.m_transform.rotation = Quaternion.LookRotation(m_transform.forward);
本节代码可点此下载。觉得有用你就点个赞。