姿态估计: Hourglass 网络
本文是 ECCV2016 的工作,主要是介绍了一个在当时是新的姿态估计的网络结构。这里主要是对整个网络的结构和思想进行一个梳理,可以进一步明白后序一些基于此网络结构的工作(例如ECCV2018 CornerNet),不涉及到 姿态估计领域 的一些见解和讨论,所以本文主要就是分为两节,引出课题和介绍 hourglass 网络。
原文链接: https://arxiv.org/abs/1603.06937
源码链接: http://www-personal.umich.edu/~alnewell/pose

1. Introduction
准确的姿态估计是理解人类在图片或者视频中行为的关键。对于一张单独的 RGB 图像, 我们希望可以准确定位出一些身体重要的关键点。对于人体姿态的理解及姿体结构对于高层任务,例如人机交互等是很重要的。
在姿态估计领域同样有着多个严峻的挑战。一个好的估计系统必须对遮挡还有严重的变形有很好的鲁棒性,能检测出一些奇特的姿势,包括对光照和衣服等变化的影响具有不变性。
本文提出 “stacked hourglass” 的网络来进行姿态估计,它可以获取到所以尺度图像的信息,因为网络结构的下采样和上采样操作,从结构上看像一个沙漏(hourglass) 而得名,像其他卷积方法一样,我们也将输入图片下采样到一个很小的分辨率,再上采样,并将统一尺寸的特征结合起来。另一方面,hourglass 网络由于它更对称的拓扑结构又不同于之前的一些网络设计。
本文级联了多个 Hourglass 的结构并结合了中间监督的使用,重复的双向推理对网络最后的性能至关重要。
随着 DeepPose 工作的提出,人们把姿态估计的目光从一些传统方法转向了深度网络。 DeepPose 是直接对人体的关节点的坐标 x,y 进行回归。
单个 “horglass” 模块结构如下图所示:
这里的 “hourglass” 结构很像 FCN,结构最大的不同点就是更加对称的容量分布(包括特征从高分辨率到低分辨率,从低分辨率到高分辨率),可能其他工作,FCN 或者 holistically-nested 结构都是高分辨率到低分辨率(down-top)容量比较大(结构较复杂),低分辨率到高分辨率(top-down)就结构简单。 这里的结构也与一些做分割,样本生成,去噪自编码器,监督/半监督特征学习等的结构很像,但是操作的本质不同, “hourglass” 没有使用 unpooling 操作或者是解卷积层,而是使用了最简单的最近邻上采样和跨层连接来做 top-down(上采样)。还有一个不一样的点是,本文工作堆叠了多个 “hourglass” 的结构来构建整个网络。
——————————————————————————————————————————————
这里为什么要做多个 “hourglass” 结构的级联?
文中指出相互关键点之间也是有关系的,知道了双肩就更好预测肘,知道了肘的位置就更好的预测手的位置,而每一个 “hourglass” 结构都很会产生一个热力图预测,这样级联起来,上一个 “hourglass” 学习并预测的关节点之间的联系也可以为下一级所用。
——————————————————————————————————————————————
2. Network Architecture
2.1 Hourglass design
Hourglass 结构的设计主要是源于想要抓住每个尺度信息的需求。例如一些局部信息对识别一些特征(例如脸,手等)很重要,而对于最后姿态的估计需要对整个身体有一个好的理解,这就要抓住很多局部的特征信息并结合起来。人的朝向,他们四肢的排列,相邻关节的关系都是在不同尺度图像中最好辨认的。 而 hourglass 则是一个简单的,最小化的设计,有这个能力捕捉全部的特征信息并做出最后的像素级别的预测。
有的工作采用多分支的结构来达到整合多分辨率的目的,本文则是采用单一网络+跨层连接来保留每一个分辨率的空间信息,hourglass 结构最低会将特征图降到 4x4 的分辨率。
top-down 阶段: 采用卷积层 + maxpooling
down-top 阶段: 采用 [参考文献15] 中提出的最近邻上采样 + 跨层连接
因为要跨层连接,进行点加(element-wise addtion),所以它们对应分辨率的通道数都是一样的,这就成了更加对称的结构。 最后输出端用连续两个 1x1 的卷积层来产生最后的输出。
2.2 Layer Implementation
上面提出的 “hourglass” 只是一个形状像沙漏的结构,内部的实现细节还是很灵活的,文中也对一些结构进行了探索,例如从 GoogLeNet,ResNet 中学习的用连续的 3x3 代替 5x5,残差结构, Inception 结构等 ,最终定下的设计是使用:残差结构,最大的卷积核不超过 3x3, 瓶颈结构。

整个网络如果直接使用 256x256 的分辨率将会需要很大的 GPU 内存,所有最高的分辨率以及最后输出的分辨率都是 64x64,这并不影响最后的结果。 整个网络从一个卷积核大小是 7x7,stride=2 的卷积层开始,后面跟一个残差模块和一个 Max-pooling,让分辨率直接从 256 降到 64. 沙漏模块之前还是两个残差模块,所有的残差模块的输出都是 256 个通道。
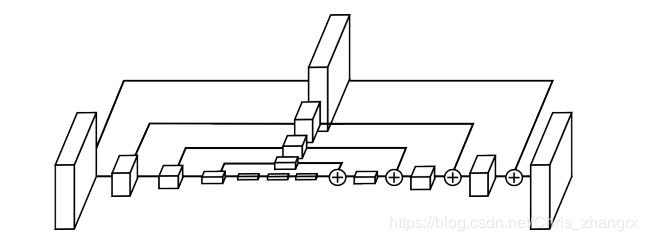
2.3 Stacked Hourglass with Intermediate Supervision
上面提到为什么做多个 “hourglass” 结构的级联,并且每一个级联预测的 heatmaps (上图中蓝色区域)都会与真值对比产生一个 loss,最后将这些 loss 都加在一起,文中通过实验证明了这样做比只考虑最后一个 loss 的结果要好很多,这种考虑网络中间部分输出的训练就是中间监督(intermediate supervision)