由6,14以及68点人脸关键点计算头部姿态
前言
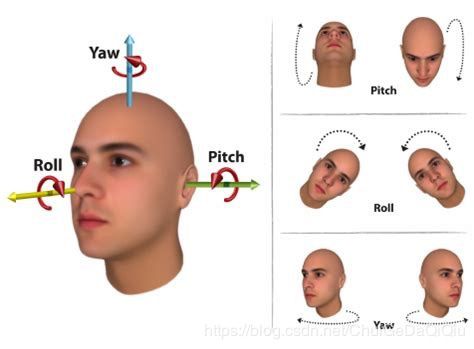
关于头部姿态估计理论部分的内容,网络上包括我所列的参考文献中都有大量概述,我不再重复。这里直入主题,如何通过图像中2D人脸关键点计算出头部姿态角,具体就是计算出俯仰角(pitch),偏航角(yaw)和翻滚角(roll)。
计算头部姿态需要的若干数据:
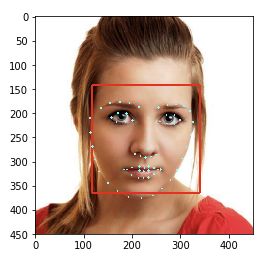
1、首先,你需要拿到2D人脸关键点坐标,通过dlib的人脸关键点检测器可以很容易的计算出人脸68个关键点的位置。但是在具体计算头部姿态的时候可以选择性的使用这68个关键点。我看网上大量的文章都是摘取的其中6个关键点(如下图)。我分别试验了6点、14点以及68点这三种情形。
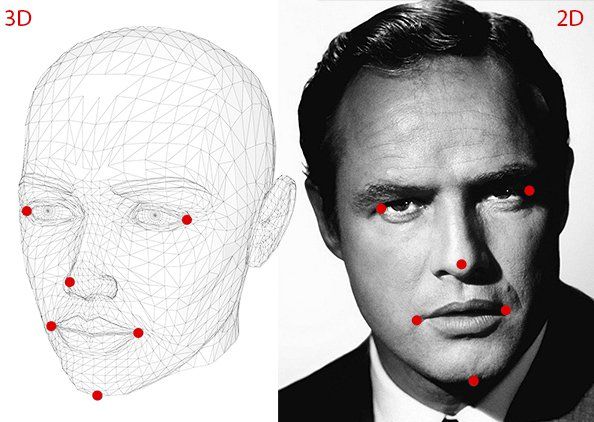
2、从上一步计算出的人脸关键点中选出N(例如:6)个,但因为这N个点只是2D坐标,你还要想办法计算出他们对应的3D坐标。你或许会想,这一步是不是需要图像中的人脸的3D模型?只能说理论上是这样的,而实际应用过程中,一个通用的3D模型就可以满足了,更近一步,你只需要知道通用模型中关键点对应的3D坐标位置就可以干活了,例如:
- 鼻尖: ( 0.0, 0.0, 0.0)
- 下额 : ( 0.0, -330.0, -65.0)
- 左眼角 : (-225.0f, 170.0f, -135.0)
- 右眼角:( 225.0, 170.0, -135.0)
- 左嘴角:-150.0, -150.0, -125.0)
- 右嘴角:(150.0, -150.0, -125.0)
3、摄像机的内部参数。
实测
1、人脸关键点
关键点的获取由dlib来实现,其中需要用到官方预训练好的模型,地址如下:
http://sourceforge.net/projects/dclib/files/dlib/v18.10/shape_predictor_68_face_landmarks.dat.bz2
具体实现可以参考以下代码:
#!/usr/bin/env python
# coding: utf-8
import dlib
import cv2
import matplotlib.pyplot as plt
import numpy as np
detector = dlib.get_frontal_face_detector() #加载dlib自带的人脸检测器
pic_path = "1033.jpg"
img = cv2.imread(pic_path)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) #opencv读到的是BGR的矩阵
faces = detector(img, 1) #检测人脸,返回检出的人脸框,可能有多张
r = faces[0] #只取第一张脸
x0,y0,x1,y1 = r.left(),r.top(),r.right(),r.bottom()
cv2.rectangle(img, (x0,y0), (x1,y1), (255,0,0), 2) #画个人脸框框
predictor = dlib.shape_predictor('shape_predictor_68_face_landmarks.dat') #加载关键点检测模型
ldmk = predictor(img, face) #对指定的人脸进行特征点检测
points_68 = np.matrix([[p.x, p.y] for p in ldmk.parts()])
for _, p in enumerate(points_68):
pos = (p[0,0], p[0,1])
cv2.circle(img, pos, 2, (0,255,255), -1, 8)
plt.imshow(img)
2、头部姿态计算
下面我分别尝试了6点、14点以及68点做头部姿态的计算。

what?一个完全正确的都没有。就68点的情形靠谱点,至少在Y,X方向上基本是对的,但Z方向比较诡异。我这个出的是由欧拉角计算出来的实际角度。我把代码附在后面,欢迎大家一起来改进!
【参考文献】
https://blog.csdn.net/yuanlulu/article/details/82763170
https://zhuanlan.zhihu.com/p/51208197
【源代码】
#!/usr/bin/env python
# -*- coding: utf-8 -*-
from __future__ import print_function
import os
import cv2
import sys
import numpy as np
import math
class PoseEstimator:
"""Estimate head pose according to the facial landmarks"""
def __init__(self, img_size=(480, 640)):
self.size = img_size
# 3D model points.
self.model_points_6 = np.array([
(0.0, 0.0, 0.0), # Nose tip
(0.0, -330.0, -65.0), # Chin
(-225.0, 170.0, -135.0), # Left eye left corner
(225.0, 170.0, -135.0), # Right eye right corne
(-150.0, -150.0, -125.0), # Left Mouth corner
(150.0, -150.0, -125.0) # Right mouth corner
], dtype=float) / 4.5
self.model_points_14 = np.array([
(6.825897, 6.760612, 4.402142),
(1.330353, 7.122144, 6.903745),
(-1.330353, 7.122144, 6.903745),
(-6.825897, 6.760612, 4.402142),
(5.311432, 5.485328, 3.987654),
(1.789930, 5.393625, 4.413414),
(-1.789930, 5.393625, 4.413414),
(-5.311432, 5.485328, 3.987654),
(2.005628, 1.409845, 6.165652),
(-2.005628, 1.409845, 6.165652),
(2.774015, -2.080775, 5.048531),
(-2.774015, -2.080775, 5.048531),
(0.000000, -3.116408, 6.097667),
(0.000000, -7.415691, 4.070434)], dtype=float)
self.model_points_68 = np.array([
[-73.393523, -29.801432, -47.667532],
[-72.775014, -10.949766, -45.909403],
[-70.533638, 7.929818, -44.84258 ],
[-66.850058, 26.07428 , -43.141114],
[-59.790187, 42.56439 , -38.635298],
[-48.368973, 56.48108 , -30.750622],
[-34.121101, 67.246992, -18.456453],
[-17.875411, 75.056892, -3.609035],
[ 0.098749, 77.061286, 0.881698],
[ 17.477031, 74.758448, -5.181201],
[ 32.648966, 66.929021, -19.176563],
[ 46.372358, 56.311389, -30.77057 ],
[ 57.34348 , 42.419126, -37.628629],
[ 64.388482, 25.45588 , -40.886309],
[ 68.212038, 6.990805, -42.281449],
[ 70.486405, -11.666193, -44.142567],
[ 71.375822, -30.365191, -47.140426],
[-61.119406, -49.361602, -14.254422],
[-51.287588, -58.769795, -7.268147],
[-37.8048 , -61.996155, -0.442051],
[-24.022754, -61.033399, 6.606501],
[-11.635713, -56.686759, 11.967398],
[ 12.056636, -57.391033, 12.051204],
[ 25.106256, -61.902186, 7.315098],
[ 38.338588, -62.777713, 1.022953],
[ 51.191007, -59.302347, -5.349435],
[ 60.053851, -50.190255, -11.615746],
[ 0.65394 , -42.19379 , 13.380835],
[ 0.804809, -30.993721, 21.150853],
[ 0.992204, -19.944596, 29.284036],
[ 1.226783, -8.414541, 36.94806 ],
[-14.772472, 2.598255, 20.132003],
[ -7.180239, 4.751589, 23.536684],
[ 0.55592 , 6.5629 , 25.944448],
[ 8.272499, 4.661005, 23.695741],
[ 15.214351, 2.643046, 20.858157],
[-46.04729 , -37.471411, -7.037989],
[-37.674688, -42.73051 , -3.021217],
[-27.883856, -42.711517, -1.353629],
[-19.648268, -36.754742, 0.111088],
[-28.272965, -35.134493, 0.147273],
[-38.082418, -34.919043, -1.476612],
[ 19.265868, -37.032306, 0.665746],
[ 27.894191, -43.342445, -0.24766 ],
[ 37.437529, -43.110822, -1.696435],
[ 45.170805, -38.086515, -4.894163],
[ 38.196454, -35.532024, -0.282961],
[ 28.764989, -35.484289, 1.172675],
[-28.916267, 28.612716, 2.24031 ],
[-17.533194, 22.172187, 15.934335],
[ -6.68459 , 19.029051, 22.611355],
[ 0.381001, 20.721118, 23.748437],
[ 8.375443, 19.03546 , 22.721995],
[ 18.876618, 22.394109, 15.610679],
[ 28.794412, 28.079924, 3.217393],
[ 19.057574, 36.298248, 14.987997],
[ 8.956375, 39.634575, 22.554245],
[ 0.381549, 40.395647, 23.591626],
[ -7.428895, 39.836405, 22.406106],
[-18.160634, 36.677899, 15.121907],
[-24.37749 , 28.677771, 4.785684],
[ -6.897633, 25.475976, 20.893742],
[ 0.340663, 26.014269, 22.220479],
[ 8.444722, 25.326198, 21.02552 ],
[ 24.474473, 28.323008, 5.712776],
[ 8.449166, 30.596216, 20.671489],
[ 0.205322, 31.408738, 21.90367 ],
[ -7.198266, 30.844876, 20.328022]])
self.focal_length = self.size[1]
self.camera_center = (self.size[1] / 2, self.size[0] / 2)
self.camera_matrix = np.array(
[[self.focal_length, 0, self.camera_center[0]],
[0, self.focal_length, self.camera_center[1]],
[0, 0, 1]], dtype="double")
# Assuming no lens distortion
self.dist_coeefs = np.zeros((4, 1))
# Rotation vector and translation vector
self.r_vec = np.array([[0.01891013], [0.08560084], [-3.14392813]])
self.t_vec = np.array([[-14.97821226], [-10.62040383], [-2053.03596872]])
def get_euler_angle(self, rotation_vector):
# calc rotation angles
theta = cv2.norm(rotation_vector, cv2.NORM_L2)
# transform to quaterniond
w = math.cos(theta / 2)
x = math.sin(theta / 2)*rotation_vector[0][0] / theta
y = math.sin(theta / 2)*rotation_vector[1][0] / theta
z = math.sin(theta / 2)*rotation_vector[2][0] / theta
# pitch (x-axis rotation)
t0 = 2.0 * (w*x + y*z)
t1 = 1.0 - 2.0*(x**2 + y**2)
pitch = math.atan2(t0, t1)
# yaw (y-axis rotation)
t2 = 2.0 * (w*y - z*x)
if t2 > 1.0:
t2 = 1.0
if t2 < -1.0:
t2 = -1.0
yaw = math.asin(t2)
# roll (z-axis rotation)
t3 = 2.0 * (w*z + x*y)
t4 = 1.0 - 2.0*(y**2 + z**2)
roll = math.atan2(t3, t4)
return pitch, yaw, roll
def solve_pose_by_6_points(self, image_points):
"""
Solve pose from image points
Return (rotation_vector, translation_vector) as pose.
"""
points_6 = np.float32([
image_points[30], image_points[36], image_points[45],
image_points[48], image_points[54], image_points[8]])
_, rotation_vector, translation_vector = cv2.solvePnP(
self.model_points_6,
points_6,
self.camera_matrix,
self.dist_coeefs,
rvec=self.r_vec,
tvec=self.t_vec,
useExtrinsicGuess=True)
return rotation_vector, translation_vector
def solve_pose_by_14_points(self, image_points):
points_14 = np.float32([
image_points[17], image_points[21], image_points[22], image_points[26], image_points[36],
image_points[39], image_points[42], image_points[45], image_points[31], image_points[35],
image_points[48], image_points[54], image_points[57], image_points[8]])
_, rotation_vector, translation_vector = cv2.solvePnP(
self.model_points_14,
points_14,
self.camera_matrix,
self.dist_coeefs,
rvec=self.r_vec,
tvec=self.t_vec,
useExtrinsicGuess=True)
return rotation_vector, translation_vector
def solve_pose_by_68_points(self, image_points):
_, rotation_vector, translation_vector = cv2.solvePnP(
self.model_points_68,
image_points,
self.camera_matrix,
self.dist_coeefs,
rvec=self.r_vec,
tvec=self.t_vec,
useExtrinsicGuess=True)
return rotation_vector, translation_vector
def draw_annotation_box(self, image, rotation_vector, translation_vector, color=(255, 255, 255), line_width=2):
"""Draw a 3D box as annotation of pose"""
point_3d = []
rear_size = 75
rear_depth = 0
point_3d.append((-rear_size, -rear_size, rear_depth))
point_3d.append((-rear_size, rear_size, rear_depth))
point_3d.append((rear_size, rear_size, rear_depth))
point_3d.append((rear_size, -rear_size, rear_depth))
point_3d.append((-rear_size, -rear_size, rear_depth))
front_size = 100
front_depth = 100
point_3d.append((-front_size, -front_size, front_depth))
point_3d.append((-front_size, front_size, front_depth))
point_3d.append((front_size, front_size, front_depth))
point_3d.append((front_size, -front_size, front_depth))
point_3d.append((-front_size, -front_size, front_depth))
point_3d = np.array(point_3d, dtype=np.float).reshape(-1, 3)
# Map to 2d image points
(point_2d, _) = cv2.projectPoints(point_3d,
rotation_vector,
translation_vector,
self.camera_matrix,
self.dist_coeefs)
point_2d = np.int32(point_2d.reshape(-1, 2))
# Draw all the lines
cv2.polylines(image, [point_2d], True, color, line_width, cv2.LINE_AA)
cv2.line(image, tuple(point_2d[1]), tuple(
point_2d[6]), color, line_width, cv2.LINE_AA)
cv2.line(image, tuple(point_2d[2]), tuple(
point_2d[7]), color, line_width, cv2.LINE_AA)
cv2.line(image, tuple(point_2d[3]), tuple(
point_2d[8]), color, line_width, cv2.LINE_AA)
def run(pic_path):
points_68 = load_anno(pic_path) #加载68个人脸特征点,自行实现
img = cv2.imread(pic_path)
pose_estimator = PoseEstimator(img_size=img.shape)
#pose = pose_estimator.solve_pose_by_6_points(points_68)
#pose = pose_estimator.solve_pose_by_14_points(points_68)
#pose = pose_estimator.solve_pose_by_68_points(points_68)
pitch, yaw, roll = pose_estimator.get_euler_angle(pose[0])
def _radian2angle(r):
return (r/math.pi)*180
Y, X, Z = map(_radian2angle, [pitch, yaw, roll])
line = 'Y:{:.1f}\nX:{:.1f}\nZ:{:.1f}'.format(Y,X,Z)
print('{},{}'.format(os.path.basename(pic_path), line.replace('\n',',')))
y = 20
for _, txt in enumerate(line.split('\n')):
cv2.putText(img, txt, (20, y), cv2.FONT_HERSHEY_PLAIN, 1.3, (0,0,255), 1)
y = y + 15
for p in points_68:
cv2.circle(img, (int(p[0]),int(p[1])), 2, (0,255,0), -1, 0)
cv2.imshow('img', img)
if cv2.waitKey(-1) == 27:
pass
return 0
if __name__ == "__main__":
if len(sys.argv) != 2:
print("%(prog)s IMAGE_PATH")
sys.exit(-1)
sys.exit(run(sys.argv[1]))