DBSCAN聚类算法
1、算法引入及简介
为什么要引入DBSCAN?
K均值聚类使用非常广泛,作为古老的聚类方法,它的算法非常简单,而且速度很快。但是其缺点在于它不能识别非球形的簇;而DBSCAN算法是将所有点标记为核心点、边界点或噪声点,将任意两个距离不大于E(eps)的核心点归为同一个簇,任何与核心点足够近的边界点也放到与之相同的簇中,可以发现任意形状的簇类。
人为构造基于sin函数和cos函数构成的两组点数据,分别用K均值与DBSCAN算法聚类,对比如下:


K均值 DBSCAN
可以发现K均值聚类结果是不理想的
DBSCAN定义
DBSCAN(Density-Based Spatial Clustering of Application with Noise),是一个较有代表性的基于密度的聚类算法。它将簇定义为密度相连的点的最大集合,能够把具有足够高密度的区域划分为簇,并可在噪声的空间数据库中发现任意形状的聚类。简单的说就是过滤低密度区域,把扎堆的点(高密度区域)找出来。
2、相关概念
1)密度:任意一点的密度是以该点为圆心、以E为半径的圆区域内包含的点数目。 4
2)Ε邻域:给定对象半径为Ε内的区域称为该对象的Ε邻域。
3)核心对象:如果对象的E邻域样本点数大于等于MinPts(最小样本点数),则称该对象为核心对象。 a
4)边界点:在以半径为E的邻域内点的数量小于MinPts,但是落在其他核心点的邻域内。 d
5)噪声点:既不是边界点也不是核心点的任意点。 e

2)Ε邻域:给定对象半径为Ε内的区域称为该对象的Ε邻域。
3)核心对象:如果对象的E邻域样本点数大于等于MinPts(最小样本点数),则称该对象为核心对象。 a
4)边界点:在以半径为E的邻域内点的数量小于MinPts,但是落在其他核心点的邻域内。 d
5)噪声点:既不是边界点也不是核心点的任意点。 e
6)直接密度可达:对于样本集合D,如果样本点q在p的Ε领域内,并且p为核心对象,那么对象q从对象p直接密度可达(如果p是一个核心对象,q属于p的邻域,q从p直接密度可达)。
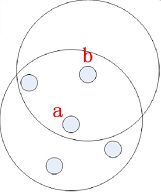 a为核心对象,b为边界对象,b从a直接密度可达,反过来不成立,因为b不是核心对象
a为核心对象,b为边界对象,b从a直接密度可达,反过来不成立,因为b不是核心对象
7)密度可达:对于样本集合D,给定一串样本点p1,p2….pn,p= p1,q= pn,假如对象pi从pi-1直接密度可达,那么对象q从对象p密度可达。
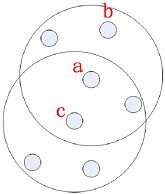 b从a直接密度可达,a从c直接密度可达, 故b从c密度可达,同理c从b密度不可达
b从a直接密度可达,a从c直接密度可达, 故b从c密度可达,同理c从b密度不可达
8)密度相连:存在样本集合D中的一点o,如果对象o到对象p和对象q都是密度可达的,那么p和q密度相连。
b从a密度可达,c也从a密度可达,故b和c密度相连。
b从a密度可达,c也从a密度可达,故b和c密度相连。
示例

如图,E用相应半径表示,设MinPts=3
m、p、o、r为核心对象,s、q为边界点(对应E领域内点的个数为2 q和p从m直接密度可达,m从p直接密度可达,故p从q密度可达,p和q密度相连
s和r从o密度可达,s和r密度相连
m、p、o、r为核心对象,s、q为边界点(对应E领域内点的个数为2
s和r从o密度可达,s和r密度相连
3、算法描述
输入: 包含n个对象的数据库,半径E,最小样本点MinPts;
输出:所有生成的簇。
(1)Repeat
(2)从数据库中抽出一个未处理的点;
(3)IF抽出的点是核心点 THEN 找出所有从该点密度可达的对象,形成一个簇;
(4)ELSE 抽出的点是边缘点(非核心对象),跳出本次循环,寻找下一个点;
(5)UNTIL 所有的点都被处理。
输出:所有生成的簇。
(1)Repeat
(2)从数据库中抽出一个未处理的点;
(3)IF抽出的点是核心点 THEN 找出所有从该点密度可达的对象,形成一个簇;
(4)ELSE 抽出的点是边缘点(非核心对象),跳出本次循环,寻找下一个点;
(5)UNTIL 所有的点都被处理。
3.1步骤
(1)DBSCAN需要二个参数: 扫描半径 (E)和最小包含样本点数(MinPts)。 任选一个未被访问(unvisited)的点开始,找出与其距离在E之内(包括E)的所有附近点。
(2)如果 附近点的数量 ≥ minPts,则当前点与其附近点形成一个簇,并且出发点被标记为已访问(visited)。 然后递归,以相同的方法处理该簇内所有未被标记为已访问(visited)的点,从而对簇进行扩展。
(3)如果 附近点的数量 < minPts,则该点暂时被标记作为噪声点。
(4)如果簇充分地被扩展,即簇内的所有点被标记为已访问,然后用同样的算法去处理未被访问的点。
3.2具体实现过程
(1)检测数据库中尚未检查过的对象p,找出与其距离在E之内(包括E)的所有附近点,若包含的对象数不小于MinPts,建立新簇C,将其中的所有点加入候选集N;
(2)对候选集N 中所有尚未被处理的对象q,检查其邻域,若至少包含minPts个对象,则将这些对象加入N;如果q 未归入任何一个簇,则将q 加入C;
(3)重复步骤2),继续检查N 中未处理的对象,当前候选集N为空;
(4)重复步骤1)~3),直到所有对象都归入了某个簇或标记为噪声。
3.3实例
如下二维数据集,设E=3.MinPts=3,使用DBSCAN对其聚类

先扫描样本点P1(1,2)
计算其E邻域,即找样本点中与其距离不大于E的样本点
P1样本点的E邻域为:{P1、P2、P3、P13}
P1的密度为4>MinPts,因此P1是核心点
P1样本点的E邻域为:{P1、P2、P3、P13}
P1的密度为4>MinPts,因此P1是核心点
以P1点建立新簇C1,令N为P1邻域内的点的集合
对N中的每一个点q,如果q未处理过且是核心点,则将q邻域内的点并入N。如果q还不是任何簇的成员,把q添加到C1
对P2邻域为{P1,P2,P3,P13},为核心点且未处理过将其邻域内的点并入N,把P2添加到C1
对P3,邻域为{P1,P2,P3,P4,P13},同上,将P3邻域内的点并入N,把P3添加到C1
对P13,邻域为{P1,P2,P3,P4,P13},同上,将P13邻域内的点并入N,把P13添加到C1
继续考虑N中未处理的点P4,邻域为{P3,P4,P13},将P4邻域内的点并入N, 把P4添加到C1
此时集合N中对象全部处理完毕,得到簇C1,包含点{P1,P2,P3,P4,P13}
继续扫描样本点P5(5,8),同上得簇C2,包含{P5,P6,P7,P8}
继续扫描样本点P9(9,5):
计算其E邻域为{P9},为非核心点
继续扫描样本点P10(1,12):
P10样本点的E邻域为{P10,P11},为非核心点
继续扫描样本点P11(3,12):
P11 样本点E邻域为{P10,P11,P12},P11是核心点
以P11点建立新簇C3,令N为P11邻域内点的集合
对N中的每一个点q,如果q未处理过且是核心点,则将q邻域内的点并入N。如果q还不是任何簇的成员,把q添加到C1
对N中的每一个点q,如果q未处理过且是核心点,则将q邻域内的点并入N。如果q还不是任何簇的成员,把q添加到C1
对P2邻域为{P1,P2,P3,P13},为核心点且未处理过将其邻域内的点并入N,把P2添加到C1
对P3,邻域为{P1,P2,P3,P4,P13},同上,将P3邻域内的点并入N,把P3添加到C1
对P13,邻域为{P1,P2,P3,P4,P13},同上,将P13邻域内的点并入N,把P13添加到C1
继续考虑N中未处理的点P4,邻域为{P3,P4,P13},将P4邻域内的点并入N, 把P4添加到C1
此时集合N中对象全部处理完毕,得到簇C1,包含点{P1,P2,P3,P4,P13}
继续扫描样本点P5(5,8),同上得簇C2,包含{P5,P6,P7,P8}
继续扫描样本点P9(9,5):
计算其E邻域为{P9},为非核心点
继续扫描样本点P10(1,12):
P10样本点的E邻域为{P10,P11},为非核心点
继续扫描样本点P11(3,12):
P11 样本点E邻域为{P10,P11,P12},P11是核心点
以P11点建立新簇C3,令N为P11邻域内点的集合
对N中的每一个点q,如果q未处理过且是核心点,则将q邻域内的点并入N。如果q还不是任何簇的成员,把q添加到C1
对P10,非核心点,把P10加入C3
对P12,邻域为{P11,P12},非核心点,把P12加入C3
此时N中对象处理完毕得到簇C3
对P12,邻域为{P11,P12},非核心点,把P12加入C3
此时N中对象处理完毕得到簇C3
继续扫描样本点,P12和P13都已经处理过,算法结束
最后聚类结果为:3个簇 C1{P1,P2,P3,P4,P13} C2{P5,P6,P7,P8} C3{P10,P11,P12}
样本点P9未归类为任何一个,最后判定为噪声
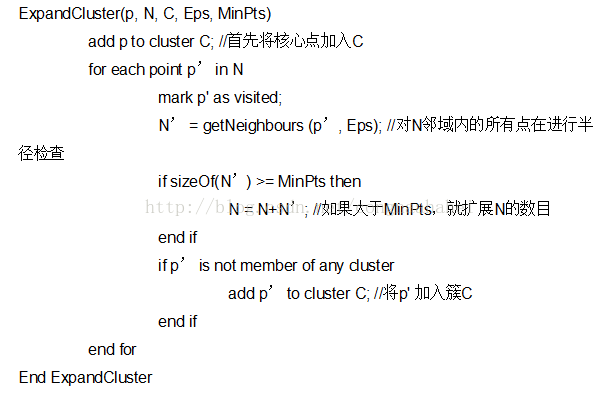
3.4算法伪代码

其中ExpandCluster算法伪码如下:
3.5关于E和MinPts参数的选择
给定MinPts
1)E值过大:很多噪声被错误的归入簇,分离的若干个 自然簇错误的合并为一个簇
2)E值过小:大量对象被错误的标记为噪声
给定E值
1)MinPts值过大:核心点数量减少,使得一些包含对象数较少的自然簇被弄丢
2)MinPts值过小:大量对象被标记为核心点,从而将噪声归入簇
4、算法优缺点及改进
4.1优点:
1)与K-means方法相比,DBSCAN不需要事先知道要形成的簇类的数量。
2)与K-means方法相比,DBSCAN可以发现任意形状的簇类。
3)同时,DBSCAN能够识别出噪声点。
4)DBSCAN对于数据库中样本的顺序不敏感,但是,对于处于簇类之间边界样本,可能会根据哪个簇类优先被探测到而其归属有所摆动。
2)与K-means方法相比,DBSCAN可以发现任意形状的簇类。
3)同时,DBSCAN能够识别出噪声点。
4)DBSCAN对于数据库中样本的顺序不敏感,但是,对于处于簇类之间边界样本,可能会根据哪个簇类优先被探测到而其归属有所摆动。
4.2缺点:
1)于高维数据,密度定义较麻烦。
2)簇的密度变化太大,会有麻烦。
1)于高维数据,密度定义较麻烦。
2)簇的密度变化太大,会有麻烦。
4.3算法改进
一种基于距离的自适应确定参数E和MinPts的方法
(1)给定数据集P={p(i); i=0,1,…n},对于任意点P(i),计算点P(i)到集合D的子集S={p(1), p(2), …, p(i-1), p(i+1), …, p(n)}中所有点之间的距离,距离按照从小到大的顺序排序,假设排序后的距离集合为D={d(1), d(2), …, d(k-1), d(k), d(k+1), …,d(n)},则d(k)就被称为k-距离。也就是说,k-距离是点p(i)到所有点(除了p(i)点)之间距离第k近的距离。对待聚类集合中每个点p(i)都计算k-距离,最后得到所有点的k-距离集合E={e(1), e(2), …, e(n)}
(2)对集合E进行升序排序后,绘出曲线,通过观察,将急剧发生变化的位置所对应的k-距离的值,确定为半径Eps的值
(3)在上述E确定的情况下,统计数据集中每个点的E邻域内点的数目,然后对整个数据集中每个点的E邻域内的点的数目求数学期望得到MinPts,此时的MinPts为每个聚类中核心对象E邻域内的数据点个数的最优值。计算公式为:

其中,Pi为点i的的E邻域内点的个数