PCL学习笔记8 —— 基于octree的空间划分及搜索操作
(1) octree是一种用于管理稀疏3D数据的树形数据结构,每个内部节点都正好有八个子节点。本文介绍如何用octree在点云数据中进行空间划分及近邻搜索,实现“体素内近邻搜索(Neighbors within VOxel Search)”,"K近邻搜索(K Nearest Neighbor Search)","半径内近邻搜索"(Neighbors within Radius Search)。
- K近邻搜索(K Nearest Neighbor Search)
要做K邻近搜索,首先要了解K近邻算法,即K-Nearest Neighbor algorithm,简称KNN算法。单从名字来猜想,可以简单粗暴的认为是:K个最近的邻居,当K=1时,算法便成了最近邻算法,即寻找最近的那个邻居。为何要找邻居?打个比方来说,假设你来到一个陌生的村庄,现在你要找到与你有着相似特征的人群融入他们,所谓入伙。
官方定义K近邻算法,即是给定一个训练数据集,对新的输入实例,在训练数据集中找到与该实例最邻近的K个实例(也就是上面所说的K个邻居), 这K个实例的多数属于某个类,就把该输入实例分类到这个类中。根据这个说法,咱们来看下引自维基百科上的一幅图:
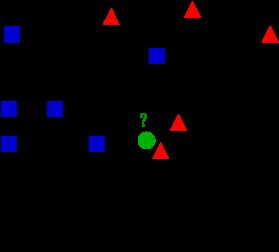
如上图所示,有两类不同的样本数据,分别用蓝色的小正方形和红色的小三角形表示,而图正中间的那个绿色的圆所标示的数据则是待分类的数据。也就是说,现在,我们不知道中间那个绿色的数据是从属于哪一类(蓝色小正方形or红色小三角形),下面,我们就要解决这个问题:给这个绿色的圆分类。
我们常说,物以类聚,人以群分,判别一个人是一个什么样品质特征的人,常常可以从他/她身边的朋友入手,所谓观其友,而识其人。我们不是要判别上图中那个绿色的圆是属于哪一类数据么,好说,从它的邻居下手。但一次性看多少个邻居呢?从上图中,你还能看到:
- 如果K=3,绿色圆点的最近的3个邻居是2个红色小三角形和1个蓝色小正方形,少数从属于多数,基于统计的方法,判定绿色的这个待分类点属于红色的三角形一类。
- 如果K=5,绿色圆点的最近的5个邻居是2个红色三角形和3个蓝色的正方形,还是少数从属于多数,基于统计的方法,判定绿色的这个待分类点属于蓝色的正方形一类。
于此我们看到,当无法判定当前待分类点是从属于已知分类中的哪一类时,我们可以依据统计学的理论看它所处的位置特征,衡量它周围邻居的权重,而把它归为(或分配)到权重更大的那一类。这就是K近邻算法的核心思想。
KNN算法中,所选择的邻居都是已经正确分类的对象。该方法在定类决策上只依据最邻近的一个或者几个样本的类别来决定待分样本所属的类别。
KNN 算法本身简单有效,它是一种 lazy-learning 算法,分类器不需要使用训练集进行训练,训练时间复杂度为0。KNN 分类的计算复杂度和训练集中的文档数目成正比,也就是说,如果训练集中文档总数为 n,那么 KNN 的分类时间复杂度为O(n)。
KNN方法虽然从原理上也依赖于极限定理,但在类别决策时,只与极少量的相邻样本有关。由于KNN方法主要靠周围有限的邻近的样本,而不是靠判别类域的方法来确定所属类别的,因此对于类域的交叉或重叠较多的待分样本集来说,KNN方法较其他方法更为适合。
K 近邻算法使用的模型实际上对应于对特征空间的划分。K 值的选择,距离度量和分类决策规则是该算法的三个基本要素:
- K 值的选择会对算法的结果产生重大影响。K值较小意味着只有与输入实例较近的训练实例才会对预测结果起作用,但容易发生过拟合;如果 K 值较大,优点是可以减少学习的估计误差,但缺点是学习的近似误差增大,这时与输入实例较远的训练实例也会对预测起作用,使预测发生错误。在实际应用中,K 值一般选择一个较小的数值,通常采用交叉验证的方法来选择最优的 K 值。随着训练实例数目趋向于无穷和 K=1 时,误差率不会超过贝叶斯误差率的2倍,如果K也趋向于无穷,则误差率趋向于贝叶斯误差率。
- 该算法中的分类决策规则往往是多数表决,即由输入实例的 K 个最临近的训练实例中的多数类决定输入实例的类别
- 距离度量一般采用 Lp 距离,当p=2时,即为欧氏距离,在度量之前,应该将每个属性的值规范化,这样有助于防止具有较大初始值域的属性比具有较小初始值域的属性的权重过大。
半径内近邻搜索"(Neighbors within Radius Search)
#include "pch.h"
#include
#include //类cloud_viewer头文件申明
#include //标准输入输出头文件申明
#include //I/O相关头文件申明
#include //PCD文件读取
#include
VTK_MODULE_INIT(vtkRenderingOpenGL);
VTK_MODULE_INIT(vtkInteractionStyle);
VTK_MODULE_INIT(vtkRenderingFreeType);
#define BOOST_TYPEOF_EMULATION
#include //点云头文件
#include //八叉树头文件
#include
#include
int main(int argc, char** argv)
{
srand((unsigned int)time(NULL)); //用系统时间初始化随机种子与 srand (time (NULL))的区别
pcl::PointCloud::Ptr cloud(new pcl::PointCloud);
// 创建点云数据
cloud->width = 1000;
cloud->height = 1; //无序
cloud->points.resize(cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); ++i) //随机循环产生点云的坐标值
{
cloud->points[i].x = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024.0f * rand() / (RAND_MAX + 1.0f);
}
/****************************************************************************
创建一个octree实例,用设置分辨率进行初始化,该octree用它的页节点存放点索引向量,
分辨率参数描述最低一级octree的最小体素的尺寸,因此octree的深度是分辨率和点云空间维度
的函数,如果知道点云的边界框,应该用defineBoundingbox方法把它分配给octree然后通过
点云指针把所有点增加到ctree中。
*****************************************************************************/
float resolution = 128.0f;
pcl::octree::OctreePointCloudSearch octree(resolution); //初始化Octree
octree.setInputCloud(cloud); //设置输入点云 这两句是最关键的建立PointCloud和octree之间的联系
octree.addPointsFromInputCloud(); //构建octree
pcl::PointXYZ searchPoint; //设置searchPoint
searchPoint.x = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.y = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.z = 1024.0f * rand() / (RAND_MAX + 1.0f);
/*************************************************************************************
一旦PointCloud和octree联系一起,就能进行搜索操作,这里使用的是“体素近邻搜索”,把查询点所在体素中
其他点的索引作为查询结果返回,结果以点索引向量的形式保存,因此搜索点和搜索结果之间的距离取决于octree的分辨率参数
*****************************************************************************************/
std::vector pointIdxVec; //存储体素近邻搜索结果向量
if (octree.voxelSearch(searchPoint, pointIdxVec)) //执行搜索,返回结果到pointIdxVec
{
std::cout << "Neighbors within voxel search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z << ")"
<< std::endl;
for (size_t i = 0; i < pointIdxVec.size(); ++i) //打印结果点坐标
std::cout << " " << cloud->points[pointIdxVec[i]].x
<< " " << cloud->points[pointIdxVec[i]].y
<< " " << cloud->points[pointIdxVec[i]].z << std::endl;
}
/**********************************************************************************
K 被设置为10 ,K近邻搜索 方法把搜索结果写到两个分开的向量,第一个pointIdxNKNSearch包含搜索结果
(结果点的索引的向量) 第二个向量pointNKNSquaredDistance存储搜索点与近邻之间的距离的平方。
*************************************************************************************/
//K 近邻搜索
int K = 10;
std::vector pointIdxNKNSearch; //结果点的索引的向量
std::vector pointNKNSquaredDistance; //搜索点与近邻之间的距离的平方
std::cout << "K nearest neighbor search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with K=" << K << std::endl;
if (octree.nearestKSearch(searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0)
{
for (size_t i = 0; i < pointIdxNKNSearch.size(); ++i)
std::cout << " " << cloud->points[pointIdxNKNSearch[i]].x
<< " " << cloud->points[pointIdxNKNSearch[i]].y
<< " " << cloud->points[pointIdxNKNSearch[i]].z
<< " (squared distance: " << pointNKNSquaredDistance[i] << ")" << std::endl;
}
// 半径内近邻搜索
std::vector pointIdxRadiusSearch;
std::vector pointRadiusSquaredDistance;
float radius = 256.0f * rand() / (RAND_MAX + 1.0f);
std::cout << "Neighbors within radius search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with radius=" << radius << std::endl;
if (octree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0)
{
for (size_t i = 0; i < pointIdxRadiusSearch.size(); ++i)
std::cout << " " << cloud->points[pointIdxRadiusSearch[i]].x
<< " " << cloud->points[pointIdxRadiusSearch[i]].y
<< " " << cloud->points[pointIdxRadiusSearch[i]].z
<< " (squared distance: " << pointRadiusSquaredDistance[i] << ")" << std::endl;
}
}
Octree类关键点的说明:
PCL octree组件提供了几个octree类型,它们各自的叶节点特征基本上是不同的,OctreePointCloudVector(等于OctreePointCloud):该octree能够保存每一个节点上的点索引列。OctreePointCloudSinglePoint: 该octree类仅仅保存每一个节点上的单个点的索引,仅仅保存最后分配给叶节点的点索引OctreePointCloudOccupancy: 该octree类不存储它的叶节点上的任何信息,它能用于空间填充情况检查OctreePointCloudDensity:存储每一个叶节点体素中点的数目,它可以进行空间点集密集程度的查询。
(2) 无序点云数据集的空间变化检测
octree是一种管理稀疏3D数据的树状结构,利用octree实现多个无序点云之间的空间变化检测,这些点云可能在尺寸。分辨率 密度,和点顺序等方面有所差异,通过递归的比较octree的树结构,可以鉴定出由octree产生的体素组成的区别所代表的空间变化,还要学习关于octree的“双缓冲”技术,以便实时的探测多个点云之间的空间组成的差异。
#define BOOST_TYPEOF_EMULATION
#include
#include
#include
#include
#include
int
main(int argc, char** argv)
{
srand((unsigned int)time(NULL)); //用系统时间初始化随机种子
// 八叉树的分辨率,即体素的大小
float resolution = 32.0f;
// 初始化空间变化检测对象
pcl::octree::OctreePointCloudChangeDetector octree(resolution);
pcl::PointCloud::Ptr cloudA(new pcl::PointCloud); //创建点云实例cloudA生成的点云数据用于建立八叉树octree对象
// 为cloudA点云填充点数据
cloudA->width = 128; //设置点云cloudA的点数
cloudA->height = 1; //无序点
cloudA->points.resize(cloudA->width * cloudA->height); //总数
for (size_t i = 0; i < cloudA->points.size(); ++i) //循环填充
{
cloudA->points[i].x = 64.0f * rand() / (RAND_MAX + 1.0f);
cloudA->points[i].y = 64.0f * rand() / (RAND_MAX + 1.0f);
cloudA->points[i].z = 64.0f * rand() / (RAND_MAX + 1.0f);
}
// 添加点云到八叉树中,构建八叉树
octree.setInputCloud(cloudA); //设置输入点云
octree.addPointsFromInputCloud(); //从输入点云构建八叉树
/***********************************************************************************
点云cloudA是参考点云用其建立的八叉树对象描述它的空间分布,octreePointCloudChangeDetector
类继承自Octree2BufBae类,Octree2BufBae类允许同时在内存中保存和管理两个octree,另外它应用了内存池
该机制能够重新利用已经分配了的节点对象,因此减少了在生成点云八叉树对象时昂贵的内存分配和释放操作
通过访问 octree.switchBuffers ()重置八叉树 octree对象的缓冲区,但把之前的octree数据仍然保留在内存中
************************************************************************************/
// 交换八叉树的缓冲,但是CloudA对应的八叉树结构仍然在内存中
octree.switchBuffers();
//cloudB点云用于建立新的八叉树结构,与前一个cloudA对应的八叉树共享octree对象,同时在内存中驻留
pcl::PointCloud::Ptr cloudB(new pcl::PointCloud); //实例化点云对象cloudB
// 为cloudB创建点云
cloudB->width = 128;
cloudB->height = 1;
cloudB->points.resize(cloudB->width * cloudB->height);
for (size_t i = 0; i < cloudB->points.size(); ++i)
{
cloudB->points[i].x = 64.0f * rand() / (RAND_MAX + 1.0f);
cloudB->points[i].y = 64.0f * rand() / (RAND_MAX + 1.0f);
cloudB->points[i].z = 64.0f * rand() / (RAND_MAX + 1.0f);
}
// 添加cloudB到八叉树中
octree.setInputCloud(cloudB);
octree.addPointsFromInputCloud();
/**************************************************************************************************************
为了检索获取存在于couodB的点集R,此R并没有cloudA中的元素,可以调用getPointIndicesFromNewVoxels方法,通过探测两个八叉树之间
体素的不同,它返回cloudB 中新加点的索引的向量,通过索引向量可以获取R点集 很明显这样就探测了cloudB相对于cloudA变化的点集,但是只能探测
到在cloudA上增加的点集,二不能探测减少的
****************************************************************************************************************/
std::vector newPointIdxVector; //存储新添加的索引的向量
// 获取前一cloudA对应八叉树在cloudB对应在八叉树中没有的点集
octree.getPointIndicesFromNewVoxels(newPointIdxVector);
// 打印点集
std::cout << "Output from getPointIndicesFromNewVoxels:" << std::endl;
for (size_t i = 0; i < newPointIdxVector.size(); ++i)
std::cout << i << "# Index:" << newPointIdxVector[i]
<< " Point:" << cloudB->points[newPointIdxVector[i]].x << " "
<< cloudB->points[newPointIdxVector[i]].y << " "
<< cloudB->points[newPointIdxVector[i]].z << std::endl;
} 运行结果:
Output from getPointIndicesFromNewVoxels:
0# Index:1 Point:2.26758 60.123 42.7949
1# Index:73 Point:0.207031 51.2402 45.3848
2# Index:121 Point:1.30664 50.2832 45.7363
3# Index:13 Point:62.3164 32.5938 1.66797
4# Index:95 Point:63.9551 10.6563 4.48242
5# Index:21 Point:62.8711 55.418 4.48047本实验是为了检索获取存在于couodB的点集R,此R并没有cloudA中的元素,可以调用getPointIndicesFromNewVoxels方法,通过探测两个八叉树之间 体素的不同,它返回cloudB 中新加点的索引的向量,通过索引向量可以获取R点集 很明显这样就探测了cloudB相对于cloudA变化的点集,但是只能探测 到在cloudA上增加的点集,二不能探测减少的。
参考博文:1、https://www.cnblogs.com/v-July-v/archive/2012/11/20/3125419.html
2、https://blog.csdn.net/u013019296/article/details/70052311