电子技术背后的数学本质【1】(以及常见电路的数学本质分析)
最近在做一些项目的时候,需要在高速情况下对小信号进行放大器的设计。因此对阻抗、频率响应、谐振等问题进行了深入了分析,发现原来过去所学的电工学基础、模拟电子技术基础、控制论等学科之间有着相互紧密的联系。因此这里把这些问题全部从新梳理一遍,然后挖掘各部分之间的关系。并以此来解决一个实际要用到的运算放大器的设计。
文章目录
- 1.复阻抗
- 1.1阻抗的定义
- 1.2理想电阻的复阻抗
- 1.3理想电容的复阻抗
- 1.4理想电感的复阻抗
- 1.5题外话
- 2.控制工程论基础
- 2.1系统的定义和拉普拉斯变换
- 2.2一阶系统
- 2.3二阶系统
- 2.4高阶系统
- 3.控制工程论之频率响应
- 3.1频率特性
- 3.2典型环节的频率响应和Bode图
- 3.3系统的Bode图分析
- 4.实际的电子器件分析
- 4.1RC电路的分析
- 4.2RL电路的分析
- 4.3LC电路的分析
- 4.4RLC电路的分析
- 4.5为什么大电容滤低频信号,小电容滤高频信号
- 4.6双重旁路电容电路
1.复阻抗
1.1阻抗的定义
对于阻抗这一部分,主要是在电工学基础这门课程里,第一次接触到这个概念。其实但就阻抗来说,其定义非常简单,就是任何两端器件,无论在什么时候,都可以将两端的电压除以流经的电流来得到阻抗。即
Z = V / I Z=V/I Z=V/I
但是我们知道,当输入(假设为电压)为某种频率的正弦波信号时,如果负载呈容性或者感性,对应的输出(假设为电流)就是在该频率的正弦波信号基础上,进行幅值和相位的改变。此时的阻抗为:
电 压 : u ( t ) = U 0 c o s ( ω t + φ u ) 电压:u(t)=U_0cos(\omega t+\varphi_u) 电压:u(t)=U0cos(ωt+φu)
电 流 : i ( t ) = I 0 c o s ( ω t + φ i ) 电流:i(t)=I_0cos(\omega t+\varphi_i) 电流:i(t)=I0cos(ωt+φi)
阻 抗 : z ( t ) = u ( t ) i ( t ) = U 0 I 0 c o s ( ω t + φ u ) c o s ( ω t + φ i ) 阻抗:z(t)=\frac{u(t)}{i(t)}=\frac{U_0}{I_0} \frac{cos(\omega t+\varphi_u)}{cos(\omega t+\varphi_i)} 阻抗:z(t)=i(t)u(t)=I0U0cos(ωt+φi)cos(ωt+φu)
观察上述阻抗,当频率已知时,阻抗的有用信息就只有幅值和相移。这两个也是我们所关心的数值。
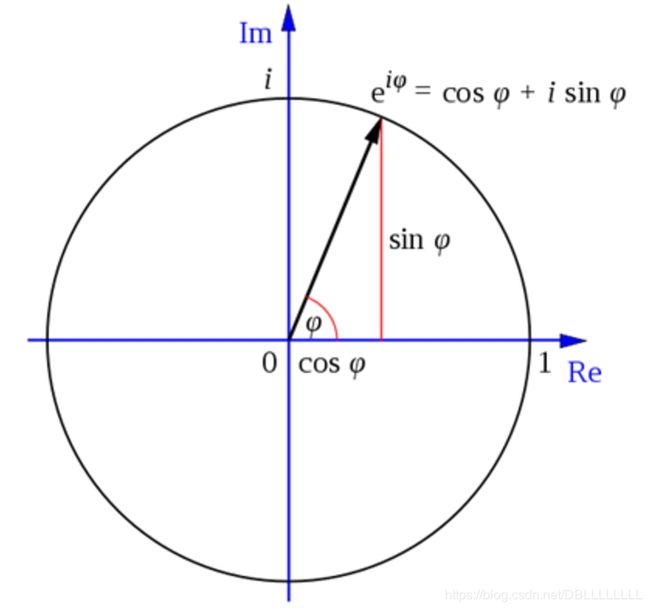
通过高等数学的学习,我们了解到,可以通过欧拉公式,将三角函数转化为复数。即:
e j x = c o s x + j s i n x e^{jx}=cosx+jsinx ejx=cosx+jsinx
 因此,为了方便计算,以及更直观的了解阻抗,我们通过欧拉公式对上式进行转化:
因此,为了方便计算,以及更直观的了解阻抗,我们通过欧拉公式对上式进行转化:
复 电 压 : U ~ ( t ) = U 0 e j ( ω t + φ u ) = U 0 c o s ( ω t + φ u ) + j U 0 s i n ( ω t + φ u ) 复电压:\widetilde U(t)=U_0e^{j(\omega t+\varphi_u)}=U_0cos(\omega t+\varphi_u)+jU_0sin(\omega t+\varphi_u) 复电压:U (t)=U0ej(ωt+φu)=U0cos(ωt+φu)+jU0sin(ωt+φu)
复 电 流 : I ~ ( t ) = I 0 e j ( ω t + φ i ) = I 0 c o s ( ω t + φ i ) + j I 0 s i n ( ω t + φ i ) 复电流:\widetilde I(t)=I_0e^{j(\omega t+\varphi_i)}=I_0cos(\omega t+\varphi_i)+jI_0sin(\omega t+\varphi_i) 复电流:I (t)=I0ej(ωt+φi)=I0cos(ωt+φi)+jI0sin(ωt+φi)
复 阻 抗 : Z ~ = U ~ I ~ = U 0 I 0 e j ( φ u − φ i ) 复阻抗:\widetilde Z = \frac{\widetilde U}{\widetilde I}=\frac{U_0}{I_0}e^{j(\varphi_u - \varphi_i)} 复阻抗:Z =I U =I0U0ej(φu−φi)
通过上述的分析过程,我们分别对理想电阻、理想电容、理想电感进行分析。
1.2理想电阻的复阻抗
对于理想电阻来说,电阻流过的电流为 I 0 c o s ( ω t ) I_0cos(\omega t) I0cos(ωt)( I 0 e j ( ω t ) I_0e^{j(\omega t)} I0ej(ωt)),那么电阻两端的电压为
V = I 0 c o s ( ω t ) ∗ R V=I_0cos(\omega t)*R V=I0cos(ωt)∗R
V ~ = I 0 R e j ( ω t ) \widetilde V=I_0Re^{j(\omega t)} V =I0Rej(ωt)
则阻抗为
Z = V I = I 0 s i n ( ω t ) ∗ R I 0 s i n ( ω t ) = R Z=\frac{V}{I}=\frac{I_0sin(\omega t)*R}{I_0sin(\omega t)}=R Z=IV=I0sin(ωt)I0sin(ωt)∗R=R
Z ~ = U ~ I ~ = I 0 R e j ( ω t ) I 0 e j ( ω t ) = R \widetilde Z= \frac{\widetilde U}{\widetilde I}=\frac{I_0Re^{j(\omega t)}}{I_0e^{j(\omega t)}} =R Z =I U =I0ej(ωt)I0Rej(ωt)=R
也就是说,理想电阻在频域内,阻抗都是相等的,与正弦电流的频率无关。
从复阻抗分析,其复阻抗也为R。
1.3理想电容的复阻抗
对于理想电容来说,电容两端的电压为 V 0 c o s ( ω t ) V_0cos(\omega t) V0cos(ωt)( V 0 e j ( ω t ) V_0e^{j(\omega t)} V0ej(ωt)),则流过电容的电流为
I = C d d t V 0 s i n ( ω t ) = ω C V 0 c o s ( ω t ) I=C\frac{d}{dt}V_0sin(\omega t)=\omega CV_0cos(\omega t) I=CdtdV0sin(ωt)=ωCV0cos(ωt)
I ~ = C d d t V 0 e j ( ω t ) = j ω C V 0 e j ( ω t ) \widetilde I=C\frac{d}{dt}V_0e^{j(\omega t)}=j\omega CV_0e^{j(\omega t)} I =CdtdV0ej(ωt)=jωCV0ej(ωt)
则阻抗为
Z = V I = V 0 s i n ( ω t ) ω C V 0 c o s ( ω t ) = 1 ω C ∗ s i n ω t c o s ω t Z=\frac{V}{I}=\frac{V_0sin(\omega t)}{\omega CV_0cos(\omega t)}=\frac{1}{\omega C}*\frac{sin \omega t}{cos \omega t} Z=IV=ωCV0cos(ωt)V0sin(ωt)=ωC1∗cosωtsinωt
Z ~ = U ~ I ~ = V 0 e j ( ω t ) j ω C V 0 e j ( ω t ) = 1 j ω C = − j 1 ω C \widetilde Z= \frac{\widetilde U}{\widetilde I}=\frac{V_0e^{j(\omega t)}}{j\omega CV_0e^{j(\omega t)}} =\frac{1}{j \omega C}=-j\frac{1}{\omega C} Z =I U =jωCV0ej(ωt)V0ej(ωt)=jωC1=−jωC1
也就是说,对于理想电容来说,通过 1 ω C \frac{1}{\omega C} ωC1,我们可以知道,输入正弦电压的频率增加时,电容的阻抗减小。通过 s i n ω t c o s ω t \frac{sin \omega t}{cos \omega t} cosωtsinωt我们可以知道,输入和输出有-90度的相移(cosx和sinx的相位差为-90度)。
通过复阻抗我们可以很直观的把相移和阻抗幅值同时表示,即
Z = − j 1 ω C Z=-j\frac{1}{\omega C} Z=−jωC1
其中-j就表示了相位差-90度。阻抗幅值为 1 ω C \frac{1}{\omega C} ωC1。
1.4理想电感的复阻抗
对于理想电感来说,电感流过的正弦电流为 I 0 c o s ( ω t ) I_0cos(\omega t) I0cos(ωt)( I 0 e j ( ω t ) I_0e^{j(\omega t)} I0ej(ωt)),那么电感产生的电压为
V = L d d t I 0 s i n ( ω t ) = ω L I 0 c o s ( ω t ) V=L\frac{d}{dt}I_0sin(\omega t)=\omega LI_0cos(\omega t) V=LdtdI0sin(ωt)=ωLI0cos(ωt)
V ~ = L d d t I 0 e j ( ω t ) = j ω L I 0 e j ( ω t ) \widetilde V=L\frac{d}{dt}I_0e^{j(\omega t)}=j\omega LI_0e^{j(\omega t)} V =LdtdI0ej(ωt)=jωLI0ej(ωt)
则阻抗为
Z = V I = ω L I 0 c o s ( ω t ) I 0 s i n ( ω t ) = ω L ∗ c o s ω t s i n ω t Z=\frac{V}{I}=\frac{\omega LI_0cos(\omega t)}{I_0sin(\omega t)}=\omega L * \frac{cos \omega t}{sin \omega t} Z=IV=I0sin(ωt)ωLI0cos(ωt)=ωL∗sinωtcosωt
Z ~ = U ~ I ~ = j ω L I 0 e j ( ω t ) I 0 e j ( ω t ) = j ω L \widetilde Z= \frac{\widetilde U}{\widetilde I}=\frac{j\omega LI_0e^{j(\omega t)}}{I_0e^{j(\omega t)}} =j \omega L Z =I U =I0ej(ωt)jωLI0ej(ωt)=jωL
也就是说,对于理想电感来说,通过 ω L \omega L ωL可以知道,频率增加时,电感的阻抗也增加。通过 c o s ω t s i n ω t \frac{cos \omega t}{sin \omega t} sinωtcosωt可以知道,输入和输出有90度的相移(sinx和cosx的相位差为90度)。
通常我们用复数来表示,即
Z = j ω L Z=j \omega L Z=jωL
其中j就表示了相位差为90度,阻抗幅值为 ω L \omega L ωL。
1.5题外话
到这里,电路中的所有的阻抗类型我们都已经分析完了。这里欧拉公式确实是十分优美的公式,欧拉公式把复数和相位联系在了一起,让我们发现原来看似毫不相关的两个事物,竟然有着如此密不可分的关系。
实际上的电路是上述三个阻抗的结合,如同道家所述,道生一,一生二,二生三,三生万物。电阻、电容、电感的各种组合,就成为了现代电路分析的基础,在此基础上演变出了各种各样的学科和理论。
2.控制工程论基础
2.1系统的定义和拉普拉斯变换
我们上述所说的,各种电阻、电容、电感组合成了一个复杂的电路。对于这个电路,我们如何知道其性能?一种思想就是,如果说我们能够把输入、输出之间的关系弄明白,能够知道对于任意一个输入,该系统会给出什么样的输出,那么对于这个电路,我们就能够完全掌握其性能。换句话说,我们把输入、系统、输出之间的关系获得。我们所学的工程控制论就是探究系统、输入、输出三者的关系,其中系统的性能,是一种本质属性,但是这种属性可以有很多种表现形式。
一个系统的表现形式有很多,我们可以通过微分方程来建立系统之间各个变量之间的关系,也可以通过微分方程组矩阵(现代控制论)来描述,也可以通过拉普拉斯变换后的传递函数来描述,也可以通过傅里叶变换后的频率响应函数来描述。不同的描述方法其关注的侧重点不同,但是其实质都是对同一个系统进行描述,因此各种描述方法是可以互相转化的。
我们在学习工程控制论的时候,首先学习的是系统的拉普拉斯变换和传递函数。其步骤是对于一个系统,先写出系统的微分方程,然后根据微分方程得到系统的拉普拉斯变换,将输出除以输入,就是系统的传递函数。因为这里我们主要是观察系统的频率响应,因此对于系统的拉普拉斯变换,我们不进行过多的讲解。这里我们提出来拉普拉斯变换,是因为我们在进行傅里叶变换时,需要用到一些零点、极点等概念,而这些概念实际上是来自于系统的传递函数。刚才我们说了,系统的各个变换其本质是相互关联的,因此这里我们对于拉普拉斯变换进行一个简单的介绍。
对于系统的时间响应,我们常常通过以下思路来进行研究,从一阶系统出发,到二阶系统,然后推至高阶系统。
2.2一阶系统
2.2.1一阶系统的传递函数
对于一阶系统,其传递函数为
G ( s ) = 1 T s + 1 G(s) = \frac{1}{Ts+1} G(s)=Ts+11
其中 T T T为一阶系统的时间常数。
对于一阶系统来说的时间常数,其有以下性质:
1.一阶系统的时间常数表明系统的惯性,时间常数越大,系统调节所需要的时间越久,系统的惯性越大。时间常数越小,系统的响应越快速。
2.2.2一阶系统的单位脉冲响应
对于一阶系统来说,对其输入不同,其表现的输出也不同,当为脉冲输入时,一阶系统的输出为一阶系统的单位脉冲响应:
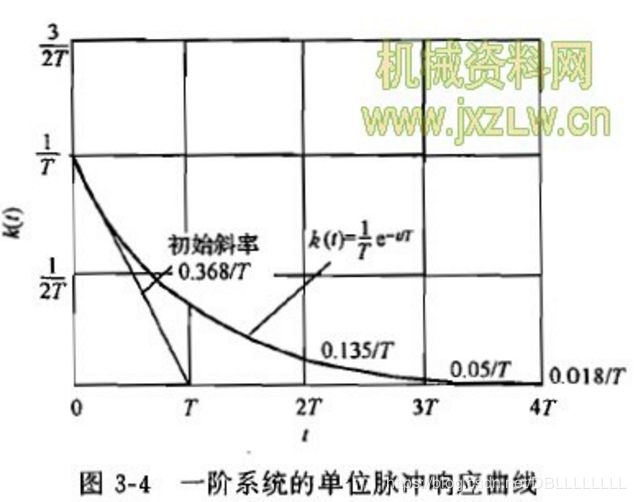
一阶系统的单位脉冲响应有以下性质:
1.在零时刻,单位脉冲响应曲线的初始值为 1 T \frac{1}{T} T1
2.在零时刻,单位脉冲响应曲线的初始斜率为 − 1 T 2 -\frac{1}{T^2} −T21
3.当t=T时,上述曲线衰减到初值的36.8%
4.在t=4T时,上述曲线衰减到初值的2%,此时称4T为过渡时间或调整时间
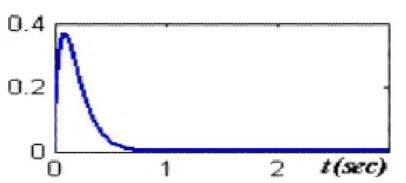
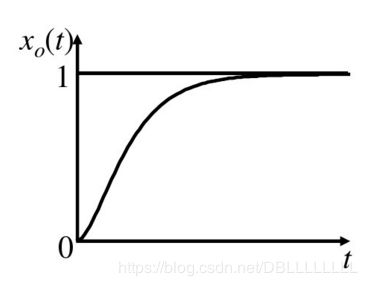
2.2.3一阶系统的单位阶跃响应
当输入为单位阶跃响应时,一阶系统的单位阶跃响应为:
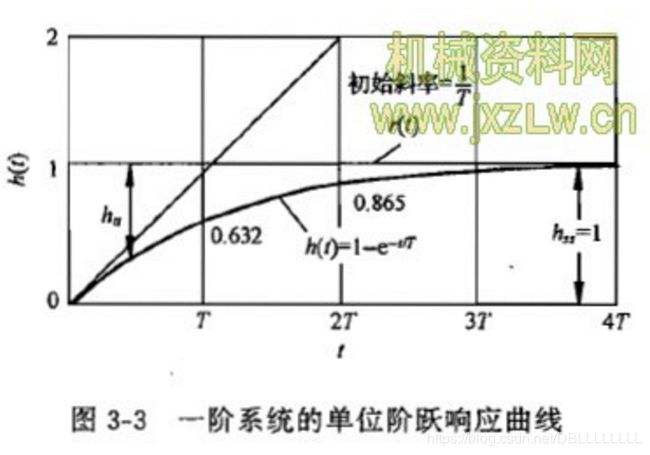
这里对于一阶系统的单位阶跃响应,有以下几个性质:
1.在零时刻,曲线的斜率为 1 T \frac{1}{T} T1
2.当t=T时,系统的响应达到了稳态值的63.2%
3.在t=4T时,系统的响应达到了稳态值的98%
这里通过T我们可以绘制出系统的响应曲线,同样的,已知响应曲线,我们也能得到系统的时间常数T。时间常数T实际上能够表征一个一阶系统的系统特性,因此我们称时间常数T为一阶系统的特征参数。
此外这里提一下,通过上面一阶系统的单位脉冲响应和单位阶跃响应,我们可以发现,系统的输入:单位阶跃输入的导数为单位脉冲输入,而其输出:单位阶跃输出的导数也为单位脉冲输出。由此可见,系统输入之间的关系,会继承到系统的输出中。
2.3二阶系统
2.3.1二阶系统的传递函数
对于二阶系统,其传递函数为
G ( s ) = ω n 2 s 2 + 2 ω n ξ s + ω n 2 G(s) = \frac{\omega_n^2}{s^2+2\omega_n \xi s+\omega_n^2} G(s)=s2+2ωnξs+ωn2ωn2
其中 ω n \omega_n ωn为无阻尼固有频率; ξ \xi ξ为阻尼比。
对于二阶系统的特征参数来说,有以下几点性质:
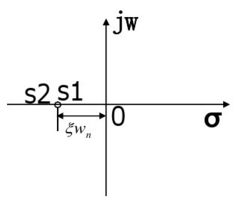
1.随着阻尼比取值的不同,系统呈现出不同的特性,具体来说
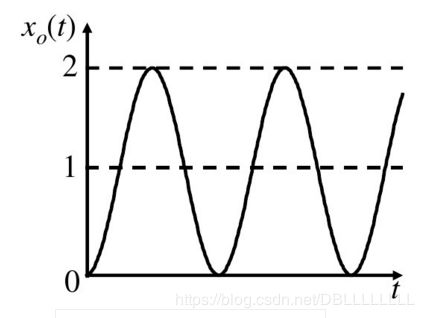
(1)当 ξ = 0 \xi=0 ξ=0时,二阶系统的两个特征根为共轭纯虚根,此时的系统为无阻尼系统,也就是系统会等幅振荡。
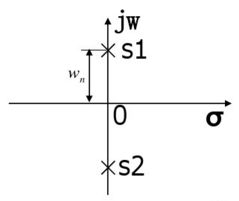
(2)当 0 < ξ < 1 0<\xi<1 0<ξ<1时,二阶系统的两个体征跟为共轭复数,此时的系统为欠阻尼系统,此时的系统是幅值不断减小的振荡。

(3)当 ξ = 1 \xi=1 ξ=1时,特征方程有两个相等的负实根,此时的系统称为临界阻尼系统,系统没有振荡。
(4)当 ξ > 1 \xi>1 ξ>1时,系统的特征方程有两个不相等的负实根,此时的系统称为过阻尼系统。这个系统也可以视为两个时间常数不相等的一阶环节的组合。

(5)总结来说,系统的阻尼比 ξ \xi ξ 越大,系统越不容易振荡。
2.系统响应时的振荡频率并不是二阶系统的无阻尼固有频率,而是二阶系统的有阻尼固有频率即 ω d \omega_d ωd,且有如下关系:
ω d = ω n 2 1 − ξ 2 \omega_d=\omega_n^2 \sqrt{1-\xi^2} ωd=ωn21−ξ2
此外我们可以看到,系统的阻尼比越小,系统的有阻尼固有频率越接近无阻尼固有频率,系统的阻尼比越大,系统的有阻尼固有频率越小,系统振荡的频率越慢。
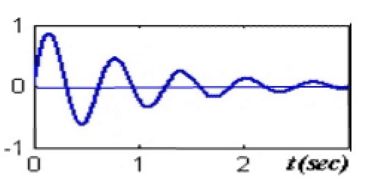
2.3.2二阶系统的单位脉冲响应
当二阶系统的输入为单位脉冲函数时,系统的输出为单位脉冲响应,且当阻尼比不同时,二阶响应的单位脉冲响应有所不同。
(1)无阻尼系统: ξ = 0 \xi=0 ξ=0

(2)欠阻尼系统: 0 < ξ < 1 0<\xi<1 0<ξ<1
(3)临界阻尼系统: ξ = 1 \xi=1 ξ=1
(4)过阻尼系统: ξ > 1 \xi>1 ξ>1

通过二阶系统的单位阶跃响应,我们能够得到以下性质:
1.阻尼比 ξ \xi ξ越小,系统衰减所需要的时间越长,系统衰减的越慢,振荡的频率越大,振荡的周期约小。
2.对于欠阻尼系统,我们又称之为二阶振荡系统。
3.对于二阶振荡系统,其幅值衰减的快慢取决于 ξ ω n \xi\omega_n ξωn,因此我们又把 ξ ω n \xi\omega_n ξωn称之为时间衰减常数,记为 σ \sigma σ
2.3.3二阶系统的单位阶跃响应
当系统的输入为单位阶跃输入时,系统的输出为单位阶跃响应。同样的,根据阻尼比的不同,系统具有不同的阶跃响应曲线。
(1)无阻尼系统: ξ = 0 \xi=0 ξ=0
(2)欠阻尼系统: 0 < ξ < 1 0<\xi<1 0<ξ<1

(3)临界阻尼系统: ξ = 1 \xi=1 ξ=1
(4)过阻尼系统: ξ > 1 \xi>1 ξ>1

通过二阶系统的单位阶跃响应,我们能够得到以下性质:
1.我们一般认为,阻尼比在0.4-0.8之间是比较好的取值,小于0.4,则系统的振荡态严重,大于0.8,则系统的过渡时间太长。因此在允许轻微振荡的使用条件下,为了追求较快的稳定时间,我们往往采用阻尼比在0.4-0.8之间。
2.对于二阶振荡系统,我们常常用以下参数来表征其性能:
(1)上升时间 t r t_r tr
一般将响应时间从稳态值的10%上升到90%所需要的时间成为上升时间。且有
t r = π − arctan 1 − ξ 2 ξ ω d = π − arctan 1 − ξ 2 ξ ω n 1 − ξ 2 t_r=\frac{\pi-\arctan{\frac{\sqrt{1-\xi^2}}{\xi}}}{\omega_d}=\frac{\pi-\arctan{\frac{\sqrt{1-\xi^2}}{\xi}}}{\omega_n \sqrt{1-\xi^2}} tr=ωdπ−arctanξ1−ξ2=ωn1−ξ2π−arctanξ1−ξ2
从这里我们可以看出,无阻尼固有频率 ω n \omega_n ωn增加,上升时间 t r t_r tr减小;阻尼比 ξ \xi ξ增加,上升时间 t r t_r tr增加。
(2)峰值时间 t p t_p tp
响应曲线到达第一个峰值所需的时间,为峰值时间 t p t_p tp。且有
t p = π ω d = π ω n 1 − ξ 2 t_p=\frac{\pi}{\omega_d}=\frac{\pi}{\omega_n \sqrt{1-\xi^2}} tp=ωdπ=ωn1−ξ2π
从这里我们可以看出,无阻尼固有频率 ω n \omega_n ωn增加,峰值时间 t p t_p tp减小;阻尼比 ξ \xi ξ增加,峰值时间 t p t_p tp增加。
(3)最大超调量 M p M_p Mp
最大超调量是峰值相对于稳态的增加百分比。即:
M p = x o ( t p ) − x o ( ∞ ) x o ( ∞ ) M_p=\frac{x_o(t_p)-x_o(\infty)}{x_o(\infty)} Mp=xo(∞)xo(tp)−xo(∞)
并且二阶振荡系统的最大超调量与以下参数有关:
M p = e − ξ π 1 − ξ 2 M_p=e^{\frac{-\xi \pi}{\sqrt{1-\xi^2}}} Mp=e1−ξ2−ξπ
由此可见,最大超调量 M p M_p Mp只与系统的阻尼比 ξ \xi ξ有关,而与无阻尼固有频率 ω n \omega_n ωn无关,并且,当系统的阻尼比 ξ \xi ξ增加时,最大超调量 M p M_p Mp减小。
(4)调整时间 t s t_s ts
系统的调整时间是指,当某时刻 t s t_s ts开始,系统与稳态的差值将始终小于2%-5%。这这个时间 t s t_s ts就是调整时间。
当差值为2%,且系统的阻尼比在0-0.7之间时,系统的调整时间约为:
t s = 4 ξ ω n t_s=\frac{4}{\xi \omega_n} ts=ξωn4
当差值为5%,且系统的阻尼比在0-0.7之间时,系统的调整时间约为:
t s = 3 ξ ω n t_s=\frac{3}{\xi \omega_n} ts=ξωn3
(5)振荡次数 N N N
在过度时间 0 ≤ t ≤ t s 0\leq{t}\leq{t_s} 0≤t≤ts内,曲线穿越其稳态值的次数的一半定义为振荡次数。
当差值为2%,且系统的阻尼比在0-0.7之间时,系统的振荡次数为:
N = 2 1 − ξ 2 π ξ N=\frac{2\sqrt{1-\xi_2}}{\pi\xi} N=πξ21−ξ2
当差值为5%,且系统的阻尼比在0-0.7之间时,系统的振荡次数为:
N = 1.5 1 − ξ 2 π ξ N=\frac{1.5\sqrt{1-\xi_2}}{\pi\xi} N=πξ1.51−ξ2
由此可见,振荡次数随着系统阻尼比 ξ \xi ξ的增加而减少。
2.4高阶系统
对于高阶系统来说,我们主要是根据其极点的分布情况来大致判断该系统的特性。
系统就是一个发散的系统。当存在重极点时,且极点等于零,则系统也是一个发散的系统,只有当系统的极点小于零,或没有重根的情况下,系统的极点小于等于零,这个系统才是一个收敛的系统。
并且对于多极点的情况,当某极点的实部十分大时,可以将该极点看成是主导极点。
3.控制工程论之频率响应
3.1频率特性
通过之前的知识,我们已经了解到,控制工程论就是探讨输入、输出、系统三者之间的关系。而当系统的输入为谐波信号时,系统会有怎么样的输出,就是该系统的频率特性。通过对第一节的阻抗的分析,我们知道了,在电学中,当输入信号为谐波时,输出会呈现出幅值的改变和相移。同样的,引申到系统中,一个系统对输入的谐波信号,也会有一个幅值和相位的改变,这种改变就是该系统的频率特性。我们这篇文章也是主要探究系统的频率特性。
系统的频率特性,分为幅频特性和相频特性,根据之前所说的欧拉公式,我们可以用以下符号来表示:
A ( ω ) e j φ ( ω ) A(\omega)e^{j\varphi(\omega)} A(ω)ejφ(ω)
或:
A ( ω ) ∠ φ ( ω ) A(\omega)∠\varphi(\omega) A(ω)∠φ(ω)
当 φ ( ω ) > 0 \varphi(\omega)>0 φ(ω)>0时,其相位超前;当 φ ( ω ) < 0 \varphi(\omega)<0 φ(ω)<0时,其相位滞后。且对于物理系统,其相位一般是滞后的,因此一般来说 φ ( ω ) < 0 \varphi(\omega)<0 φ(ω)<0。
那么对于系统的频域特性,我们如何进行求解呢?
下面介绍两种求频率特性的方法,首先第一种方法,是通过已知系统的传递函数,来求系统的频率特性。
3.1.1已知传递函数求频率特性
我们说,一个系统的不同特性,只是其内在属性的不同方面的表现,因此这些特性实际上是紧密联系的。这里对于拉普拉斯变换和傅里叶变换也是如此。对于同一个系统来说,拉普拉斯变换和傅里叶变化只是其内在属性的不同表现形式。因此这两个变换是可以进行相互转化的。
具体来说,我们只需要将系统中的传递函数G(s)中的s换为 j ω j\omega jω,就得到了系统的频率特性。
但是此时系统的频率特性是以复数形式表示的,可能不能直观的看出来系统的幅值和相位,因此此时我们一般还需要对复数形式的频率特性进行一定的化简,得到系统的幅频特性和相频特性。
下面举例说明:
已知系统的传递函数为:
G ( s ) = K 1 + T s G(s)=\frac{K}{1+Ts} G(s)=1+TsK
则系统的频率特性为:
G ( j ω ) = K 1 + j T ω G(j\omega)=\frac{K}{1+jT\omega} G(jω)=1+jTωK
采用平方差公式化简分母,用欧拉公式化简复数,得:
G ( j ω ) = K 1 + j T ω = K 1 + T 2 ω 2 ( 1 − j T ω ) = K 1 + T 2 ω 2 e − j arctan ( T ω ) G(j\omega)=\frac{K}{1+jT\omega}=\frac{K}{1+T^2\omega^2}(1-jT\omega)=\frac{K}{\sqrt{1+T^2\omega^2}}e^{-j \arctan{(T\omega)}} G(jω)=1+jTωK=1+T2ω2K(1−jTω)=1+T2ω2Ke−jarctan(Tω)
通过这种方法,我们就能实现将已知的系统的传递函数,转化为系统的频率特性。并且通过化简,可以直观的看到系统的幅频特性和相频特性。在示例中,系统的幅频特性为:
A ( ω ) = K 1 + T 2 ω 2 A(\omega)=\frac{K}{\sqrt{1+T^2\omega^2}} A(ω)=1+T2ω2K
相频特性为
φ ( ω ) = − arctan ( T ω ) \varphi(\omega)=-\arctan{(T\omega)} φ(ω)=−arctan(Tω)
3.1.2已知系统的构成求频率特性
当我们已知系统内部的组成时,我们也能够求出系统的频率特性。
以简单的RC并联电路为例,通过上述对于阻抗的学习,我们知道了,对于一个RC并联电路,其电阻的阻抗为 R R R,其电容的阻抗为 1 j ω C \frac{1}{j\omega C} jωC1。那么根据串联阻抗的计算公式,我们可以得到,整个RC电路的阻抗为:
Z = 1 1 R + j ω C = R 1 + j ω R C Z=\frac{1}{\frac{1}{R}+j\omega C}=\frac{R}{1+j\omega RC} Z=R1+jωC1=1+jωRCR
可以看出,RC电路的阻抗实际上就是这个系统的频率特性。这里我们把它化简为幅频特性、相频特性,得:
Z = R 1 + ω 2 R 2 C 2 e − j arctan ( ω R C ) Z=\frac{R}{\sqrt{1+\omega^2 R^2C^2}}e^{-j\arctan{(\omega RC)}} Z=1+ω2R2C2Re−jarctan(ωRC)
3.1.2系统频率响应的Bode图表示
另外,对于系统的频率响应,除了通过方程式来表达以外,还可以通过图的形式更直观的进行表示。一般来说有Nyquist图和Bode图两种表达方法。这里我们主要使用Bode图,因此先对系统频率响应的Bode图进行一个介绍:
Bode图有以下几个特点:
1.Bode图有两个图构成,分别是对数幅频特性图和对数相频特性图
2.Bode图的横坐标为频率,但是按对数分度。也就是说,相邻两个刻度的频率,其频率值差十倍。这也就是为什么Bode图由称为频率特性的对数坐标图。
3.对于对数幅频特性图,其纵坐标的单位是dB,按线性分度,即正常的分度方式。这里,任何一个数N的分贝值为
n ( d B ) = 20 l g N n(dB)=20lgN n(dB)=20lgN
且当n=0dB时,输入和输出的幅值相等。
4.我们常常用渐近线的方法大致的描述系统的幅值特性
3.2典型环节的频率响应和Bode图
3.2.1比例环节的Bode图
比例环节的传递函数、频率响应、幅频特性、相频特性为
G ( s ) = K ; G ( j ω ) = K G(s)=K;G(j\omega)=K G(s)=K;G(jω)=K
A ( ω ) = K = 20 l g K ( d B ) ; φ ( ω ) = 0 ° A(\omega)=K=20lgK(dB);\varphi(\omega)=0° A(ω)=K=20lgK(dB);φ(ω)=0°
则其Bode图为:

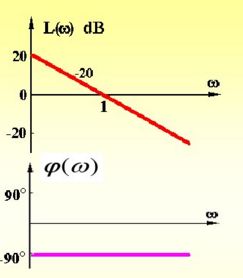
3.2.2积分环节的Bode图
比例环节的传递函数、频率响应、幅频特性、相频特性为
G ( s ) = 1 s ; G ( j ω ) = 1 j ω = − j 1 ω G(s)=\frac{1}{s};G(j\omega)=\frac{1}{j\omega}=-j\frac{1}{\omega} G(s)=s1;G(jω)=jω1=−jω1
A ( ω ) = 1 ω = 20 l g 1 ω ( d B ) = − 20 l g ω ; φ ( ω ) = − 90 ° A(\omega)=\frac{1}{\omega}=20lg\frac{1}{\omega}(dB)=-20lg\omega;\varphi(\omega)=-90° A(ω)=ω1=20lgω1(dB)=−20lgω;φ(ω)=−90°
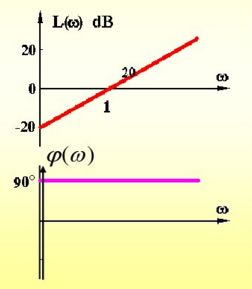
3.2.3微分环节的Bode图
微分环节的传递函数、频率响应、幅频特性、相频特性为
G ( s ) = s ; G ( j ω ) = j ω G(s)=s;G(j\omega)=j\omega G(s)=s;G(jω)=jω
A ( ω ) = ω = 20 l g ω ( d B ) ; φ ( ω ) = 90 ° A(\omega)=\omega=20lg\omega(dB);\varphi(\omega)=90° A(ω)=ω=20lgω(dB);φ(ω)=90°
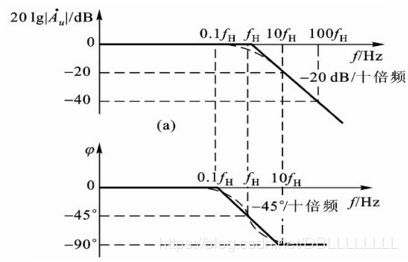
3.2.3惯性环节的Bode图
惯性环节的传递函数、频率响应为
G ( s ) = 1 1 + T s ; G ( j ω ) = 1 1 + j ω T = 1 1 + ω 2 T 2 e − j arctan ( ω T ) G(s)=\frac{1}{1+Ts};G(j\omega)=\frac{1}{1+j\omega T}=\frac{1}{\sqrt{1+\omega^2T^2}}e^{-j\arctan{(\omega T)}} G(s)=1+Ts1;G(jω)=1+jωT1=1+ω2T21e−jarctan(ωT)
令 ω T = 1 T \omega_T=\frac{1}{T} ωT=T1得:
G ( j ω ) = ω T ω T 2 + ω 2 e − j arctan ω ω T G(j\omega)=\frac{\omega_T}{\sqrt{\omega_T^2+\omega^2}}e^{-j\arctan{\frac{\omega}{\omega_T}}} G(jω)=ωT2+ω2ωTe−jarctanωTω
幅频特性、相频特性为
A ( ω ) = ω T ω T 2 + ω 2 = 20 l g ω T ω T 2 + ω 2 ( d B ) = 20 lg ω T − 20 lg ω T 2 + ω 2 ( d B ) A(\omega)=\frac{\omega_T}{\sqrt{\omega_T^2+\omega^2}}=20lg\frac{\omega_T}{\sqrt{\omega_T^2+\omega^2}}(dB)=20\lg\omega_T-20\lg\sqrt{\omega_T^2+\omega^2}(dB) A(ω)=ωT2+ω2ωT=20lgωT2+ω2ωT(dB)=20lgωT−20lgωT2+ω2(dB)
φ ( ω ) = − arctan ω ω T \varphi(\omega)=-\arctan{\frac{\omega}{\omega_T}} φ(ω)=−arctanωTω
首先我们对惯性环节的幅频特性进行分析:
当 ω < < ω T \omega<<\omega_T ω<<ωT时,
A ( ω ) ≈ 20 lg ω T − 20 lg ω T = 0 ( d B ) A(\omega) \approx 20\lg\omega_T-20\lg\omega_T=0(dB) A(ω)≈20lgωT−20lgωT=0(dB)
这表明,该系统对低频信号的放大倍数约为0dB。
当 ω = ω T \omega=\omega_T ω=ωT时,
A ( ω ) = 20 lg ω T − 20 lg 2 ω T = − 20 lg 2 = − 3 ( d B ) A(\omega) = 20\lg\omega_T-20\lg \sqrt{2}\omega_T=-20\lg \sqrt{2}=-3(dB) A(ω)=20lgωT−20lg2ωT=−20lg2=−3(dB)
这表明,该系统对频率为 ω T \omega_T ωT的信号的放大倍数约为-3dB。
当 ω > > ω T \omega>>\omega_T ω>>ωT时,
A ( ω ) ≈ 20 lg ω T − 20 lg ω A(\omega) \approx 20\lg\omega_T-20\lg \omega A(ω)≈20lgωT−20lgω
这表明,该系统对高频信号的对数幅频响应曲线,是一个过点 ( ω T , 0 ) (\omega_T,0) (ωT,0),斜率为-20dB/dec的直线。
对于该环节的相频特性,
当 ω = 0 \omega=0 ω=0时, φ ( ω ) = 0 ° \varphi(\omega)=0° φ(ω)=0°
当 ω = ω T \omega=\omega_T ω=ωT时, φ ( ω ) = − 45 ° \varphi(\omega)=-45° φ(ω)=−45°
当 ω = ∞ \omega=\infty ω=∞时, φ ( ω ) = − 90 ° \varphi(\omega)=-90° φ(ω)=−90°
总结来说,惯性环节的Bode图为:

我们可以看到,上述的 ω T \omega_T ωT对于惯性环节是一个比较常用的频率,这个频率又叫做转角频率。
此外,通过上文对RC电路的分析,我们可以看出来,RC电路实际上就是一个惯性环节,具有低通滤波的作用。且RC电路的转角频率
ω T = 1 R C \omega_T=\frac{1}{RC} ωT=RC1
3.2.4导前环节的Bode图
导前环节的传递函数、频率响应为
G ( s ) = 1 + T s ; G ( j ω ) = 1 + j ω T = 1 + ω 2 T 2 e j arctan ( ω T ) G(s)=1+Ts;G(j\omega)=1+j\omega T=\sqrt{1+\omega^2T^2}e^{j\arctan{(\omega T)}} G(s)=1+Ts;G(jω)=1+jωT=1+ω2T2ejarctan(ωT)
令 ω T = 1 T \omega_T=\frac{1}{T} ωT=T1得:
G ( j ω ) = ω T 2 + ω 2 ω T e j arctan ω ω T G(j\omega)=\frac{\sqrt{\omega_T^2+\omega^2}}{\omega_T}e^{j\arctan{\frac{\omega}{\omega_T}}} G(jω)=ωTωT2+ω2ejarctanωTω
幅频特性、相频特性为
A ( ω ) = ω T 2 + ω 2 ω T = 20 l g ω T 2 + ω 2 ω T ( d B ) = 20 lg ω T 2 + ω 2 − 20 lg ω T ( d B ) A(\omega)=\frac{\sqrt{\omega_T^2+\omega^2}}{\omega_T}=20lg\frac{\sqrt{\omega_T^2+\omega^2}}{\omega_T}(dB)=20\lg\sqrt{\omega_T^2+\omega^2}-20\lg\omega_T(dB) A(ω)=ωTωT2+ω2=20lgωTωT2+ω2(dB)=20lgωT2+ω2−20lgωT(dB)
φ ( ω ) = arctan ω ω T \varphi(\omega)=\arctan{\frac{\omega}{\omega_T}} φ(ω)=arctanωTω
其Bode图为:

3.2.5振荡环节的Bode图
振荡环节的传递函数、频率响应为
G ( s ) = ω n 2 s 2 + 2 ξ ω n s + ω n 2 ; G ( j ω ) = ω n 2 − ω 2 + ω n 2 + j 2 ξ ω n ω = ω n 2 ω n 4 − ω 4 + 4 ξ 2 ω n 2 ω 2 e − j arctan 2 ξ ω n ω ω n 2 − ω 2 G(s)=\frac{\omega_n^2}{s^2+2\xi\omega_ns+\omega_n^2};G(j\omega)=\frac{\omega_n^2}{-\omega^2+\omega_n^2+j2\xi\omega_n\omega}=\frac{\omega_n^2}{\sqrt{\omega_n^4-\omega^4+4\xi^2\omega_n^2\omega^2}}e^{-j\arctan{\frac{2\xi\omega_n\omega}{\omega_n^2-\omega^2}}} G(s)=s2+2ξωns+ωn2ωn2;G(jω)=−ω2+ωn2+j2ξωnωωn2=ωn4−ω4+4ξ2ωn2ω2ωn2e−jarctanωn2−ω22ξωnω
令 ω T = 1 T \omega_T=\frac{1}{T} ωT=T1得:
G ( j ω ) = ω T 2 + ω 2 ω T e j arctan ω ω T G(j\omega)=\frac{\sqrt{\omega_T^2+\omega^2}}{\omega_T}e^{j\arctan{\frac{\omega}{\omega_T}}} G(jω)=ωTωT2+ω2ejarctanωTω
幅频特性、相频特性为
A ( ω ) = ω n 2 ω n 4 − ω 4 + 4 ξ 2 ω n 2 ω 2 = 20 l g ω n 2 ω n 4 − ω 4 + 4 ξ 2 ω n 2 ω 2 ( d B ) = 20 lg ω n 2 − 20 lg ω n 4 − ω 4 + 4 ξ 2 ω n 2 ω 2 ( d B ) A(\omega)=\frac{\omega_n^2}{\sqrt{\omega_n^4-\omega^4+4\xi^2\omega_n^2\omega^2}}=20lg\frac{\omega_n^2}{\sqrt{\omega_n^4-\omega^4+4\xi^2\omega_n^2\omega^2}}(dB)=20\lg \omega_n^2-20\lg{\sqrt{\omega_n^4-\omega^4+4\xi^2\omega_n^2\omega^2}}(dB) A(ω)=ωn4−ω4+4ξ2ωn2ω2ωn2=20lgωn4−ω4+4ξ2ωn2ω2ωn2(dB)=20lgωn2−20lgωn4−ω4+4ξ2ωn2ω2(dB)
φ ( ω ) = − arctan 2 ξ ω n ω ω n 2 − ω 2 \varphi(\omega)=-\arctan{\frac{2\xi\omega_n\omega}{\omega_n^2-\omega^2}} φ(ω)=−arctanωn2−ω22ξωnω
对其幅频特性进行分析:
当 ω < < ω n \omega<<\omega_n ω<<ωn时,
A ( ω ) ≈ 20 lg ω n 2 − 20 lg ω n 2 = 0 ( d B ) A(\omega) \approx 20\lg\omega_n^2-20\lg\omega_n^2=0(dB) A(ω)≈20lgωn2−20lgωn2=0(dB)
这表明,该系统对低频信号的放大倍数约为0dB。
当 ω = ω n \omega=\omega_n ω=ωn时,
A ( ω ) = 20 lg ω n 2 − 20 lg 2 ξ ω n 2 = − 20 lg 2 ξ ( d B ) A(\omega) = 20\lg\omega_n^2-20\lg 2\xi\omega_n^2=-20\lg 2\xi(dB) A(ω)=20lgωn2−20lg2ξωn2=−20lg2ξ(dB)
这表明,该系统在频率为 ω n \omega_n ωn处的信号的放大倍数约与系统的阻尼比 ξ \xi ξ
有关,系统的阻尼比 ξ \xi ξ越大,则该处的放大倍数越小。
当 ω > > ω n \omega>>\omega_n ω>>ωn时,
A ( ω ) ≈ 40 lg ω T − 40 lg ω A(\omega) \approx 40\lg\omega_T-40\lg \omega A(ω)≈40lgωT−40lgω
这表明,该系统对高频信号的对数幅频响应曲线,是一个过点 ( ω n , 0 ) (\omega_n,0) (ωn,0),斜率为-40dB/dec的直线。
对于该环节的相频特性,
当 ω = 0 \omega=0 ω=0时, φ ( ω ) = 0 ° \varphi(\omega)=0° φ(ω)=0°
当 ω = ω T \omega=\omega_T ω=ωT时, φ ( ω ) = − 90 ° \varphi(\omega)=-90° φ(ω)=−90°
当 ω = ∞ \omega=\infty ω=∞时, φ ( ω ) = − 180 ° \varphi(\omega)=-180° φ(ω)=−180°
其Bode图为:

对于二阶振荡环节,除了转角频率 ω n \omega_n ωn和阻尼比 ξ \xi ξ之外,还有以下参数比较重要:
谐振频率 ω r \omega_r ωr:
振荡环节幅值的最大值处的频率并不是转角频率,而是谐振频率。一般来说,只有当阻尼比 0 ≤ ξ ≤ 0.707 0\leq\xi\leq0.707 0≤ξ≤0.707时,才存在谐振频率 ω r \omega_r ωr。谐振频率有以下公式:
ω r = ω n 1 − 2 ξ 2 \omega_r=\omega_n \sqrt{1-2\xi^2} ωr=ωn1−2ξ2
从公式我们可以看出,当阻尼比增加时, ω r \omega_r ωr远离 ω n \omega_n ωn;当阻尼比减小时, ω r \omega_r ωr接近 ω n \omega_n ωn
谐振峰值 M r M_r Mr
在谐振频率处,系统的幅值我们称之为谐振峰值,谐振峰值有以下公式:
M r = 1 2 ξ 1 − ξ 2 M_r=\frac{1}{2\xi\sqrt{1-\xi^2}} Mr=2ξ1−ξ21
由谐振峰值我们可以看出,其值只与阻尼比有关,阻尼比越小,谐振峰值越大。
3.3系统的Bode图分析
3.3.1任意系统的Bode图
任意系统的Bode图按照以下步骤进行绘制:
1.将系统的传递函数转化为多个简单环节的传递函数的乘积形式
2.由各传递函数求出其对应的频率特性
3.确定各个典型环节的转角频率
4.做出各个环节的对数幅频特性曲线的渐近线
5.根据误差修正曲线,得到各个环节的对数幅频特性曲线的精确曲线
6.将各环节的曲线叠加(不包括系统的总的增益K)
7.将叠加后的曲线垂直移动20lgK,得到系统的对数幅频特性
8.作各环节的对数相频特性,然后叠加得到系统总的对数相频特性
9.有延时环节的,对数幅频特性不变,相频特性应再加上延时的曲线
3.3.2系统的频率响应的特征量
1.零频幅值
当频率接近于零时,闭环系统的输出的幅值和输入的幅值之比。若零频幅值越接近于1,则系统的稳态误差越小。所以零频幅值反映了系统的稳态精度。
2.复现频率与复现带宽
规定一个误差值,幅频特性值和零频幅值的值的差值等于该误差值时的频率叫做复现频率。从0到该频率就是复现带宽。复现频率和复现误差指的是,当频率超过复现频率时,输出就不能复现输入。
3.谐振频率和相对谐振峰值
幅频特性最大值时的频率称为谐振频率。谐振频率处的幅值与零频幅值的比称为谐振峰值。
4.截止频率与截止带宽
幅频特性的数值低于零频幅值3dB时的频率,称为截止频率。0到截止频率的范围称为系统的截止带宽或带宽。
3.3.3系统的稳定性
这里我们只谈论通过Bode判据来判断系统的稳定性。
首先我们要注意的一点是,对于系统的稳定性判别,一般只发生在闭环系统。因为对于纯开环系统来说,没有反馈环节,系统的输出只与单次的输入有关,因此一般来说我们是不对纯开环系统进行稳定性判别的。
对于闭环系统,当我们已知系统的环路时,如果直接通过求其闭环传递函数,并判断分母的极点特性来进行稳定性判断,也是可行的,但是比较复杂。而我们通过一定的推理,可以发现,对于一个闭环系统的极点特性,可以通过其开环传递函数的频率特性来进行判断。因此,我们在进行闭环系统的稳定性判断时,往往取其开环传递函数的Bode图或Nyquist图来进行判断。
简单来说,当开环传递函数的Bode图的幅频特性曲线与x轴相交时,若此时其相频特性曲线在-180°的上方,则系统是稳定的。若此时其相频特性曲线在-180°的下方,则系统是不稳定的。此外,其到-180°的角度差,被称为相位裕度,一般我们希望相位裕度在30°-60°之间是比较满意的。
反过来,当开环传递函数的Bode图的相频特性曲线与-180°轴相交时,若此时其幅频特性曲线在x轴的下方,则系统是稳定的。若此时其幅频特性曲线在x轴的上方,则系统是不稳定的。此外,其到x轴的幅值差,被称为幅值裕度,一般我们希望幅值裕度大于6dB是比较满意的。

这里对于闭环系统的稳定性判据,我们可以简单的理解一下,首先闭环系统可以看做是一个开环系统,在一个很小的时间段内,将上一个时刻的输出叠加到上一个时刻的输入,作为系统的新的输入,得到新的输出,然后不断循环,最终叠加无穷次后得到了实际的闭环的输出。
我们不难想象,如果对于一个输入,系统的开环输出为同相的,且放大倍数大于一,那么就会造成下一次的输入增加,那么经过无数次叠加之后,此时的系统的输入就是无穷大,因此就会造成系统的不稳定。
如果其是同相但是放大倍数小于1,那么尽管下一次的输入也是增加的,但是其经过无数次叠加之后,其值是收敛的,有限的,这就造成输出值也是有限的。那么系统就是稳定的。
同样的,如果当放大倍数等于1时,单次的输出和输入不同相,则经过无数次叠加之后,其值也是有限的。
如果是反向的,输入是不断缩小的,自然能够稳定。
而上述的输入和输出在叠加时同相,实际上反映到开环函数中,是输入和输出反向,因为闭环传递函数中,是输入减去输出作为实际输入。所以才将-180°和x轴(放大倍数1倍)作为判别标准。
4.实际的电子器件分析
这里在进行实际的电路分析的时候,需要注意的是,并不是只要电路的组成元件一样,电路的性能就是一样的,电路的性能还与各个元件的组合方式等有关,例如同样是RC电路,选择不同的元件作为输出,就呈现出低通和高通两种不同的属性。这里我们只是将电路分析的方法介绍出来。
4.1RC电路的分析
通过上述的学习,我们对RC电路进行分析。
首先对于一阶无源低通滤波电路,其电路为:

通过基尔霍夫定律等可以求得:
系统的频率特性为:
G ( j ω ) = U o U i = i Z C i ( Z R + Z C ) = 1 j ω C R + 1 j ω C = 1 1 + j ω R C G(j\omega)=\frac{U_o}{U_i}=\frac{iZ_C}{i(Z_R+Z_C)}=\frac{\frac{1}{j\omega C}}{R+\frac{1}{j\omega C}}=\frac{1}{1+j\omega RC} G(jω)=UiUo=i(ZR+ZC)iZC=R+jωC1jωC1=1+jωRC1
所以这是一个放大倍数为1,时间常数为RC的惯性系统。其转角频率为:
ω T = 1 R C \omega_T=\frac{1}{RC} ωT=RC1
其Bode图为:
对于一阶无源高通滤波电路,其电路为:
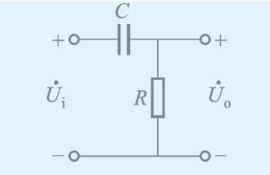
则其系统的频率特性为:
G ( j ω ) = U o U i = i Z R i ( Z R + Z C ) = R R + 1 j ω C = 1 1 − j 1 ω R C G(j\omega)=\frac{U_o}{U_i}=\frac{iZ_R}{i(Z_R+Z_C)}=\frac{R}{R+\frac{1}{j\omega C}}=\frac{1}{1-j \frac{1}{\omega RC}} G(jω)=UiUo=i(ZR+ZC)iZR=R+jωC1R=1−jωRC11
其幅频特性、相频特性为:
A ( ω ) = 1 1 + 1 ω 2 R 2 C 2 = − 20 l g 1 + 1 ω 2 R 2 C 2 ( d B ) A(\omega)=\frac{1}{\sqrt{1+\frac{1}{\omega^2 R^2 C^2}}}=-20lg{\sqrt{1+\frac{1}{\omega^2 R^2 C^2}}}(dB) A(ω)=1+ω2R2C211=−20lg1+ω2R2C21(dB)
φ ( ω ) = arctan 1 ω R C \varphi(\omega)=\arctan{\frac{1}{\omega RC}} φ(ω)=arctanωRC1
设 ω T = 1 R C \omega_T=\frac{1}{RC} ωT=RC1,则:
当 ω = 0 \omega=0 ω=0时, A ( ω ) = − ∞ A(\omega)=-\infty A(ω)=−∞, φ ( ω ) = 90 ° \varphi(\omega)=90° φ(ω)=90°
当 ω = ω T \omega=\omega_T ω=ωT时, A ( ω ) = − 3 d B A(\omega)=-3dB A(ω)=−3dB, φ ( ω ) = 45 ° \varphi(\omega)=45° φ(ω)=45°
当 ω = ∞ \omega=\infty ω=∞时, A ( ω ) = 1 d B A(\omega)=1dB A(ω)=1dB, φ ( ω ) = 0 ° \varphi(\omega)=0° φ(ω)=0°
因此该系统的Bode图为:

可见这是一个高通滤波器。
4.2RL电路的分析
对于RL滤波电路,其分析方法和上述方法一致。举例来说:

对于如图所示的RL滤波电路,其系统的频率特性为:
G ( j ω ) = U o U i = i Z R i ( Z R + Z L ) = R R + j ω L = 1 1 + j ω L R G(j\omega)=\frac{U_o}{U_i}=\frac{iZ_R}{i(Z_R+Z_L)}=\frac{R}{R+j\omega L}=\frac{1}{1+j \frac{\omega L}{R}} G(jω)=UiUo=i(ZR+ZL)iZR=R+jωLR=1+jRωL1
通过上述分析,我们知道,这个系统实际上是一个转角频率 ω T = R L \omega_T=\frac{R}{L} ωT=LR的低通滤波器。
同样如果输出电压在电感处,则为一个高通滤波器,这里就不计算了,有兴趣的同学可以自己尝试着计算以下。
4.3LC电路的分析
然后我们对LC振荡电路进行分析。
对于LC电路,其系统的频率特性为:
G ( j ω ) = U o U i = i Z C i ( Z C + Z L ) = 1 j ω C 1 j ω C + j ω L = 1 1 + j 2 ω 2 L C G(j\omega)=\frac{U_o}{U_i}=\frac{iZ_C}{i(Z_C+Z_L)}=\frac{\frac{1}{j\omega C}}{\frac{1}{j\omega C}+j\omega L}=\frac{1}{1+j^2\omega^2LC} G(jω)=UiUo=i(ZC+ZL)iZC=jωC1+jωLjωC1=1+j2ω2LC1
或者化简为传递函数的形式:
G ( s ) = 1 1 + L C s 2 = 1 L C s 2 + 1 L C G(s)=\frac{1}{1+LCs^2}=\frac{\frac{1}{LC}}{s^2+\frac{1}{LC}} G(s)=1+LCs21=s2+LC1LC1
可见这是一个阻尼比为零的二阶系统,系统的无阻尼固有频率为
ω n = 1 L C \omega_n=\frac{1}{\sqrt{LC}} ωn=LC1
其幅频特性、相频特性为:
A ( ω ) = 1 1 − ω 2 L C = − 20 l g ( 1 − ω 2 L C ) ( d B ) A(\omega)=\frac{1}{1-\omega^2LC}=-20lg{(1-\omega^2LC)}(dB) A(ω)=1−ω2LC1=−20lg(1−ω2LC)(dB)
φ ( ω ) = 0 \varphi(\omega)=0 φ(ω)=0
当 ω = 0 \omega=0 ω=0时, A ( ω ) = 1 d B A(\omega)=1dB A(ω)=1dB, φ ( ω ) = 0 ° \varphi(\omega)=0° φ(ω)=0°
当 ω = ω n \omega=\omega_n ω=ωn时, A ( ω ) = ∞ d B A(\omega)=\infty dB A(ω)=∞dB, φ ( ω ) = 0 ° 或 − 180 ° \varphi(\omega)=0°或-180° φ(ω)=0°或−180°
当 ω = ∞ \omega=\infty ω=∞时, A ( ω ) = − ∞ d B A(\omega)=-\infty dB A(ω)=−∞dB, φ ( ω ) = − 180 ° \varphi(\omega)=-180° φ(ω)=−180°
这里在频率为无阻尼固有频率处,系统的幅值达到了无穷大。
不过世界上没有完全理想的电容和电阻,因此实际上也就没有理想的LC电路。因此这里对理想LC电路的分析,实际上是不存在的。
4.4RLC电路的分析
我们上述所说的电路都是不可能理想存在的,实际上的电路都会存在着其他的寄生参数。举例来说一个实际的LC电路,实际上由于存在着寄生电阻,是一个RLC电路,那么对于RLC电路,我们进行一下分析:

如图所示是上述的LC电路的实际电路模型。对该电路分析,其系统的频率特性为:
G ( j ω ) = U o U i = i Z C i ( Z C + Z L + Z R ) = 1 j ω C 1 j ω C + j ω L + R = 1 j 2 ω 2 L C + j ω R C + 1 G(j\omega)=\frac{U_o}{U_i}=\frac{iZ_C}{i(Z_C+Z_L+Z_R)}=\frac{\frac{1}{j\omega C}}{\frac{1}{j\omega C}+j\omega L+R}=\frac{1}{j^2\omega^2LC+j\omega RC+1} G(jω)=UiUo=i(ZC+ZL+ZR)iZC=jωC1+jωL+RjωC1=j2ω2LC+jωRC+11
化简为传递函数的形式:
G ( s ) = 1 L C s 2 + R C s + 1 = 1 L C s 2 + R L s + 1 L C G(s)=\frac{1}{LCs^2+RCs+1}=\frac{\frac{1}{LC}}{s^2+\frac{R}{L}s+\frac{1}{LC}} G(s)=LCs2+RCs+11=s2+LRs+LC1LC1
可知,这是一个二阶振荡系统,系统的无阻尼固有频率、阻尼比分别为:
ω n = 1 L C ; ξ = R 2 C L \omega_n=\frac{1}{\sqrt{LC}};\xi=\frac{R}{2}\sqrt{\frac{C}{L}} ωn=LC1;ξ=2RLC
通过上面我们对于二阶振荡系统的分析,我们可以清楚的知道该系统的特性。
当 ω = 0 \omega=0 ω=0时, A ( ω ) = 1 d B A(\omega)=1dB A(ω)=1dB, φ ( ω ) = 0 ° \varphi(\omega)=0° φ(ω)=0°
当 ω = ω n \omega=\omega_n ω=ωn时, A ( ω ) = − 20 lg 2 ξ d B A(\omega)=-20\lg 2\xi dB A(ω)=−20lg2ξdB, φ ( ω ) = − 90 ° \varphi(\omega)=-90° φ(ω)=−90°
当 ω = ∞ \omega=\infty ω=∞时, A ( ω ) = − ∞ d B A(\omega)=-\infty dB A(ω)=−∞dB, φ ( ω ) = − 180 ° \varphi(\omega)=-180° φ(ω)=−180°
这里对于阻尼比,其倒数的一半称为品质因数Q。
Q = 1 2 ξ = 1 R L C Q=\frac{1}{2\xi}=\frac{1}{R}\sqrt{\frac{L}{C}} Q=2ξ1=R1CL
品质因数Q越大,则阻尼比越小,整个RLC电路就越接近于LC电路。
我们说,只有当阻尼比小于0.707时,才存在谐振频率,因此,对于品质因数,只有品质因数大于0.707时,才存在谐振频率。
4.5为什么大电容滤低频信号,小电容滤高频信号
在进行电源旁路电容设计时,我们希望,旁路电容对高频信号的通过能力越强越好,也就是说,我们希望旁路对高频的阻抗越小越好,这样直流电源的稳定性才能更好。
根据这个思想,我们知道,对于电容来说,岂不是容值越大,对高频信号的通过能力越强,越能够满足我们的使用要求吗。但是实际中,为什么我们说,大电容滤低频,小电容滤高频?
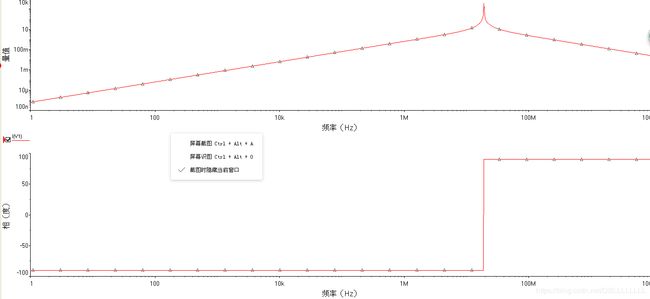
实际上这是因为,真正的电容不是一个理想电容,而是一个RLC串联电路,该电路如下图所示:

对于该电路,我们可以得到其频率特性为:
G ( j ω ) = 1 j ω C + j ω L + R = 1 + j ω R C + j 2 ω 2 L C j ω C G(j\omega)=\frac{1}{j\omega C}+j\omega L+R=\frac{1+j\omega RC+j^2\omega^2 LC}{j\omega C} G(jω)=jωC1+jωL+R=jωC1+jωRC+j2ω2LC
由此可见,系统实际上是一个积分环节和一个二阶微分环节的结合。
而这里的二阶微分环节的无阻尼固有频率 ω n = 1 L C \omega_n=\frac{1}{\sqrt{LC}} ωn=LC1,当频率小于固有频率时,二阶微分环节的幅值约为1dB,此时可以认为只有分母,也就是积分环节在起作用,因此此时整个电路呈现出电容的特性。当频率等于谐振频率时,二阶微分环节对输入的放大倍数最小,也就是阻抗最大。当频率大于固有频率时,二阶系统对输入的放大倍数逐渐增大,同时整个系统逐渐呈现出一阶微分系统的性质,此时这个系统就呈现出电感的特性。
从相位中我们也能看出,当频率较小时,相位差为-90°,呈电容性。当频率等于谐振频率(无阻尼固有频率)时,相位差为0°,呈电阻性。当频率较大时,相位差90°,呈电感性。
如图所示:

因此,如果我们需要一个电容元件能够保持其电容的特性,那么我们就要要求,其使用频率应该要小于其谐振频率,而谐振频率约等于 ω n = 1 L C \omega_n=\frac{1}{\sqrt{LC}} ωn=LC1,可见,一般来说当电容值增大时,由于尺寸增大等因素,电容的寄生电感值也在增大,这就噪声起谐振频率的快速减小,导致该电容的有效频率范围减小。因此此时大电容就不能对高频信号有一个较低的阻抗了。
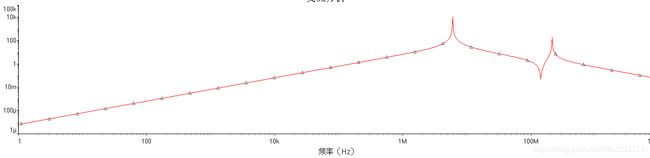
举例来说,首先来看大电容,假如我们的电容为50uF,寄生电感为2nH,寄生电阻忽略不计,那么此时我们的谐振频率为:
f n = 1 2 π L C = 503.3 k H z f_n=\frac{1}{2\pi\sqrt{LC}}=503.3kHz fn=2πLC1=503.3kHz
通过仿真软件可以得到,此时,大电容下的电流值为下图(电压不变时,电流与阻抗呈倒数):

由此可见,在500kHz频率附近的电流通过能力更强,因此这一部分的电流更容易从直流电中分离出来。但是对于频率较高的电流,其阻抗在不断增加。因此该电容只适合旁通低频率的电流。
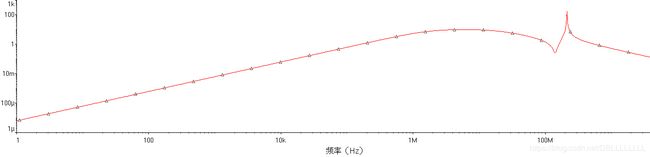
而对于小电容,其电容值小,同时由于小电容的封装一般较大电容的更小,因此其等效串联电感的值也更小,假设某小电容的参数为:100nF,700pH,电阻忽略不计,那么其谐振频率为:
f n = 1 2 π L C = 19 M H z f_n=\frac{1}{2\pi\sqrt{LC}}=19MHz fn=2πLC1=19MHz
其电流的频率响应如下所示:
由此可见,由于小电容的容值较小,所以在低频段的滤波效果不如大电容,但是由于小电容的谐振频率较高,因此小电容能在较高的频率范围内保持对交流信号良好的通过能力。
这就是为什么,大电容通低频,小电容通高频的原因。
4.6双重旁路电容电路
那么为了能够让我们的旁路电容在一个较宽的频率范围内都有一个较低的阻抗,那么此时我们可以采用并联一大一小两个电容来实现。我们假设大电容为 C 1 C_1 C1,小电容为 C 2 C_2 C2
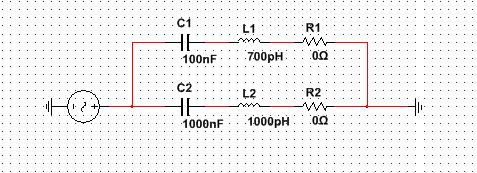
当并联两个电容时,整个电路的阻抗就变成了:
G ( j ω ) = 1 j ω C 1 1 + j ω R 1 C 1 + j 2 ω 2 L 1 C 1 + j ω C 2 1 + j ω R 2 C 2 + j 2 ω 2 L 2 C 2 G(j\omega)=\frac{1}{\frac{j\omega C_1}{1+j\omega R_1C_1+j^2\omega^2 L_1C_1}+\frac{j\omega C_2}{1+j\omega R_2C_2+j^2\omega^2 L_2C_2}} G(jω)=1+jωR1C1+j2ω2L1C1jωC1+1+jωR2C2+j2ω2L2C2jωC21
G ( s ) = ( L 1 C 1 s 2 + R 1 C 1 s + 1 ) ( L 2 C 2 s 2 + R 2 C 2 s + 1 ) s [ ( L 1 C 1 C 2 + L 2 C 1 C 2 ) s 2 + ( R 1 C 1 C 2 + R 2 C 1 C 2 ) s + ( C 1 + C 2 ) ] G(s)=\frac{(L_1C_1s^2+R_1C_1s+1)(L_2C_2s^2+R_2C_2s+1)}{s[(L_1C_1C_2+L_2C_1C_2)s^2+(R_1C_1C_2+R_2C_1C_2)s+(C_1+C_2)]} G(s)=s[(L1C1C2+L2C1C2)s2+(R1C1C2+R2C1C2)s+(C1+C2)](L1C1s2+R1C1s+1)(L2C2s2+R2C2s+1)
由此可见,系统的阻抗是由两个二阶微分环节、一个二阶积分环节和一个积分环节四部分组成。其中二阶微分环节、二阶积分环节的无阻尼固有频率分别为:
ω r 1 = 1 L 1 C 1 ; ω r 2 = 1 L 2 C 2 ; ω r 3 = C 1 + C 2 L 1 C 1 C 2 + L 2 C 1 C 2 \omega_{r1}=\frac{1}{\sqrt{L_1C_1}} ;\omega_{r2}=\frac{1}{\sqrt{L_2C_2}} ;\omega_{r3}=\sqrt{\frac{C_1+C_2}{L_1C_1C_2+L_2C_1C_2}} ωr1=L1C11;ωr2=L2C21;ωr3=L1C1C2+L2C1C2C1+C2
那么这三个谐振频率之间的大小关系式如何的呢?这就需要我们对于 C 1 、 C 2 、 L 1 、 L 2 C_1、C_2、L_1、L_2 C1、C2、L1、L2等值有个基本的概念。
首先, L 1 、 L 2 L_1、L_2 L1、L2差值不会太大,一般在1到2个数量级之间。
因为,对于电感,一般来说我们希望电感越小越好,电感越小,那么上述三个频率都会增加,那么整个系统的带宽也会增加。但是电感除了与元器件自身的串联等效电感(ESL)有关之外,还与元件的焊接方式、元件到电源之间的线长等因素有关。此外还有一个决定电感的因素,就是电容的封装的选择。一般来说,对于贴片电容,其封装尺寸约小,则等效串联电感的值越小,但是相互之间相差不大。如果采用DIP电容和SMT电容相结合,这两个的等效电感值差距最多在1到2个数量级。

上图为各封装下贴片电容的等效电感。
那么根据分析,我们知道了, L 1 L_1 L1和 L 2 L_2 L2的差值不算太大,且一般来说,大电容的寄生电感值要略大于小电容的寄生电感值(后面会将为何大电容的电感要稍微大一些),而两个电容的差值一般我们选取的时候至少是两个数量级以上,也就是说:
L 1 = k L 2 , 1 < k < 20 ; L_1=kL_2,1<k<20; L1=kL2,1<k<20;
C 1 = n L 2 , n > 100 ; C_1=nL_2,n>100; C1=nL2,n>100;
那么我们对上式进行一个化简:
ω r 1 = 1 L 1 C 1 = 1 n k 1 L 2 C 2 ; ω r 2 = 1 L 2 C 2 ; \omega_{r1}=\frac{1}{\sqrt{L_1C_1}}=\frac{1}{\sqrt{nk}}\frac{1}{\sqrt{L_2C_2}} ;\omega_{r2}=\frac{1}{\sqrt{L_2C_2}} ; ωr1=L1C11=nk1L2C21;ωr2=L2C21;
ω r 3 = C 1 + C 2 L 1 C 1 C 2 + L 2 C 1 C 2 = n + 1 n ( k + 1 ) 1 L 2 C 2 \omega_{r3}=\sqrt{\frac{C_1+C_2}{L_1C_1C_2+L_2C_1C_2}}=\sqrt{\frac{n+1}{n(k+1)}}\frac{1}{\sqrt{L_2C_2}} ωr3=L1C1C2+L2C1C2C1+C2=n(k+1)n+1L2C21
很容易就能得到:
ω r 1 < ω r 3 < ω r 2 \omega_{r1}<\omega_{r3}<\omega_{r2} ωr1<ωr3<ωr2
那么也就是说,对于两个二阶微分环节,在 ω r 1 \omega_{r1} ωr1和 ω r 2 \omega_{r2} ωr2处达到最小阻抗。此时该电路对于在这两个频率范围附近的信号的通过能力达到最大,从而将该高频信号的数据直接输送到地,从而实现对信号的滤波。
且与原来的单个电容的情况比较,单个电容只是对 ω r 1 \omega_{r1} ωr1(低频)附近的信号有旁通能力,而采用了双电容后,对 ω r 1 \omega_{r1} ωr1(低频)和 ω r 2 \omega_{r2} ωr2(高频)附近都有了旁通能力,所以可以旁通的频带加宽。
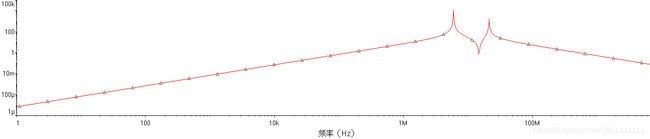
但是我们还要看到,系统中存在一个二阶积分环节,且二阶积分环节的谐振频率在两电容的谐振频率中间。对于二阶积分环节,在其谐振频率处,阻抗接近无限大,也就是在 ω r 3 \omega_{r3} ωr3处的达到一个比较大的阻抗,这也就意味着,对于该系统,虽然在 ω r 1 \omega_{r1} ωr1(低频)和 ω r 2 \omega_{r2} ωr2(高频)附近有着比较好的旁通能力,但是在两频率中间,存在一部分的中高频信号阻抗比较大,无法将该频率附近的信号从原始信号中滤除。
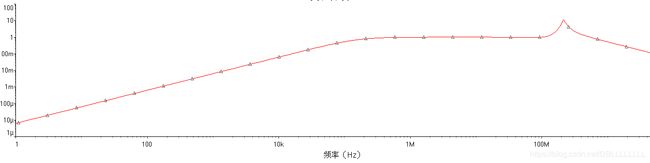
那么此时的频率—阻抗曲线就如下图所示,是一个先减小,后增大,然后再减小,然后再增大的曲线:

举例来说,假如我们现在采用了一个0603的1uF的电容和0402的1nF的电容来进行旁路滤波,那么我们可以求得三个谐振频率:
f r 1 = 6 M H z ; f r 2 = 215 M H z ; f r 3 = 142 M H z f_{r1}=6MHz ; f_{r2}=215MHz;f_{r3}=142MHz fr1=6MHz;fr2=215MHz;fr3=142MHz
可以看出,该电路对于从低频(6MHz以下)到高频(210MHz左右)信号均有比较好的滤除效果。但其中140MHz附近的信号可能滤除效果并不充分。通过上述计算三个谐振频率,我们就能基本上得到我们所设计的双电容旁路电路的系统性能。
通过仿真,我们可以得到在不同频率下通过的电流的大小(电流与阻抗成反比)。该图也验证了我们上述的计算。

如果觉得运算麻烦,也可以通过查阅下表来进行设计,因为实际上我们的寄生电感的数值是不易估计的,所以太为精确的计算有时候是没有太多意义的,我们只需要有一个模糊的、范围的认知有时候就足够我们进行设计了。下表为常见的电容和其谐振频率的对应关系:

已知大电容谐振频率和小电容谐振频率后,可以估计双电容谐振频率,双电容谐振频率在大电容谐振频率和小电容谐振频率之间,且更接近小电容谐振频率。
然后我们说,为什么在选择的时候,需要大电容的电感值大于小电容的电感值。也就是说,大电容选择较大的封装,而小电容选择较小的封装?如果电容的容值和封装选择不合理,就可能造成下图的情况:

左边是选择了相同的封装,右边是选择了不同的封装。
通过仿真我们也可以看出:



上图分别是,
正常选型(大电容远大于小电容,大电容电感大于小电容电感)、
错误选型1(大电容远大于小电容,大电容电感小于小电容电感)、
错误选型2(大电容略大于小电容,大电容电感大于小电容电感)、
错误选型3(大电容略大于小电容,大电容电感小于小电容电感)
可以看出,只有在正常选型下,其滤波的频率范围较单电容电路有明显的增加。在其他错误选型下,双电容电路的电流曲线和单电容的电流曲线差别不大。
所以这就告诉我们,在进行双电容旁路电路设计时,一方面我们要求两个电容的容值尽量的相差尽量的大,另一方面,就是两个电容的电感,尽量保证大电容的电感大于小电容的电感,也就是说,大电容采用较大的封装,小电容采用较小的封装,且注意绘制PCB板时的环路电感。
然后我们来探讨一下,两个电容之间的互谐振频率 ω r 3 \omega_{r3} ωr3如何消除影响的问题。更进一步来说,是电容的ESR的选择问题
如果对于两个电容之间的互谐振频率 ω r 3 \omega_{r3} ωr3,我们如果对于电路滤波要求比较严格,不希望有中频的噪声还存在于原始信号中,该如何消除或者避免这个二阶积分环节带来的谐振频率 ω r 3 \omega_{r3} ωr3呢?
这里就涉及到了阻抗,我们之前对二阶系统的响应函数进行过分析,我们知道,对于谐振而言,并不是每一个二阶系统都会存在谐振峰值。只有系统的阻尼在0到0.707之间,才存在谐振峰值。且阻尼越大,谐振峰值越小。通过阻抗的公式,我们可以得到:
ξ r 1 = R 1 2 C 1 L 1 ; ξ r 2 = R 2 2 C 2 L 2 \xi_{r1}=\frac{R_1}{2}\sqrt{\frac{C_1}{L_1}};\xi_{r2}=\frac{R_2}{2}\sqrt{\frac{C_2}{L_2}} ξr1=2R1L1C1;ξr2=2R2L2C2
ξ r 3 = R 1 + R 2 2 C 1 C 2 ( L 1 + L 2 ) ( C 1 + C 2 ) \xi_{r3}=\frac{R_1+R_2}{2}\sqrt{\frac{C_1C_2}{(L_1+L_2)(C_1+C_2)}} ξr3=2R1+R2(L1+L2)(C1+C2)C1C2
由此可以看出,当我们增大电容的等效串联电阻(ESR),可以提高系统的阻尼比,从而降低其谐振峰值。例如,我们在大电容旁边增加一个消谐电阻,那么在大电容处的谐振峰值和在互谐振频率处的谐振峰值将会减小。

同样通过仿真,我们可以得到以下图像。
上图分别是无消谐电阻,0.1Ω消谐电阻,1Ω消谐电阻下的电流大小。可以看到,电阻越大,其谐振峰值越小。从而实现消谐的目的。在互谐振频率下就不会存在阻抗过大的现象。
但是并不是消谐电阻越大越好。消谐电阻的存在,实际上是整体的增加了系统的阻抗。
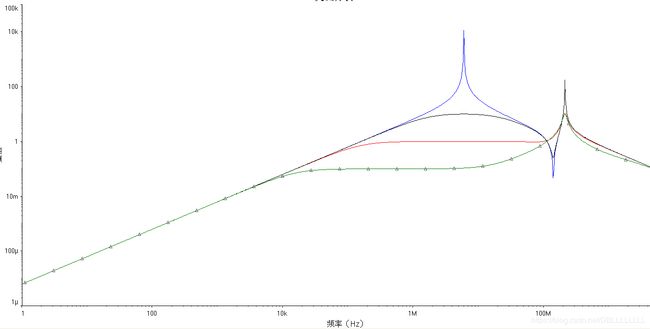
有图可以看出,在有了消谐电阻之后,虽然互谐振频率下,阻抗峰值被消除了,但是响应的,该系统整体的阻抗增加了。也就是,其通过的电流减小了。这就造成了该系统对于纹波的滤除能力减弱。因此,我们在进行消谐电阻的选择的时候,应该选择的即能消除谐振现象,又不过多的增加系统的阻抗,类似上图红色曲线的效果。
那么我们在实际的选择时,该如何选择消谐电阻的阻值呢?这里有个简单的经验公式:
R 1 = L 1 C 2 R_1=\sqrt{\frac{L_1}{C_2}} R1=C2L1
这里的 R 1 R_1 R1阻值是我们添加的消谐电阻加上电容自身的ESR的阻值之和。可能存在电容本身的ESR已经达到了我们需要的阻值,此时我们就不需要自行添加消谐电阻。这种情况是十分常见的,所以大部分双重旁路电容的设计并没有添加消谐电阻。
此外,对于电容ESR的选择,其与电路的纹波要求也有关。通过上面的图我们可以看到,当电容的ESR越大时,其在工作频率附近的阻抗就越大,换句话说,如果我们的系统是一个对电源进行旁滤滤波的电路,那么,阻抗越大,就越难以滤除电源中的纹波,也就是说,电源中的纹波值就越大。因此,一般情况下,我们希望我们的ESR尽量的小,从而能够对工作频率下的波形有更好的通过能力,从而降低主路的纹波大小。
对于ESR的取值,我们可以通过纹波大小和主电路电流大小来估算:
ESR值与纹波电压的关系可以用公式V=R(ESR)×I表示。这个公式中的V就表示纹波电压,而R表示电容的ESR,I表示电流。可以看到,当电流增大的时候,即使在ESR保持不变的情况下,纹波电压也会成倍提高。(来源来自网上)
一般来说,对于铝电解电容,容值越大,ESR越小,耐压越大,ESR越小。而且对于铝电解电容来说,由于容值太大,因此此时的容值对于谐振频率的影响并不大,因此此时更应该关注其ESR的大小,往往我们是根据纹波来计算ESR,再来选择合适的铝电解电容的。
对于贴片电容,我们则关注其频率特性,首先根据频率特性选择容值,然后ESR在能够消谐的情况下,尽可能的小,同时满足纹波条件即可。